我国与美国潜水器的发展和对比
2019-09-10杜志元杨磊陈云赛刘坤刘保华王金
杜志元 杨磊 陈云赛 刘坤 刘保华 王金



摘要:為加快我国潜水器的发展尤其是业务化应用,保障我国深海大洋科考工作的顺利开展,文章梳理美国伍兹霍尔海洋研究所和我国主要潜水器的技术指标和应用情况,并通过对比提出我国的优势和不足。研究结果表明:载人潜水器方面,我国“蛟龙”号在平均下潜深度的关键指标上领先于美国“Alvin”号,但由于发展较晚,在下潜次数等方面远远落后;无人有缆式潜水器方面,我国“海龙”系列正处于作业磨合期,在最大水下航速方面与美国“Jason”号差距较大;无人自治式潜水器方面,我国“潜龙”系列与美国“Sentry”号和“REMUS”系列差距不大,但在小型潜水器协同化作业和系列化生产等方面存在不足;复合型潜水器方面,我国“海龙11000”号与美国“NEREUS”号和“NUI”号差距不大,但应提升载荷和冰下作业能力;水下滑翔机方面,我国“海翼”号与美国“Spray”号和“Slocum”号差距不大,且即将业务化应用;我国应通过完善海洋技术装备运行机制和积极开展海上科考航次任务,不断积累潜水器作业经验。
关键词:大洋科考;载人潜水器;无人潜水器;下潜深度;海洋技术装备
中图分类号:P742文献标志码:A文章编号:1005-9857(2019)10-0055-06
The Development and Comparation of the Scientific Deepsea Submersibles between China and the United States
DU Zhiyuan1,YANG Lei1,CHEN Yunsai1,LIU Kun1,LIU Baohua1,WANG Jin2
(1National Deep Sea Center,Qingdao 266061,China;2Qingdao Teltel New Energy Technology Co.,Ltd.,Qingdao 266000,China)
Abstract:In order to speed up the development, especially the bussiness application of China′s submersibles, to ensure the development of China′s deepsea scientific research work, the current deepsea submersible of Woodshole Institute of Oceanography was taken as the research object, and the technical development and application status of deepsea research submersible in China and the United States were compared and analyzed in this paper. The research results show that:in terms of manned submersibles, China′s “Jiaolong” is ahead of the US “Alvin” in the key indicators of the average dive depth, but due to late development, it is far behind in terms of the number of dive. In terms of cable submersibles, China′s “Hailong” series are in the runningin period, and the gap of maximum underwater speed with the US “Jason” is large. In the case of unmanned autonomous submersibles, there is not much difference between China′s “Qianlong” series and the United States “REMUS” series, but there are shortcomings in the cooperative operation and serial production of small submersibles. In terms of composite submersibles, the gap between China′s “Hailong 11000” and the US “NEREUS” and “NUI” is not large, but the load and the ability to work under the ice should be improved. In terms of the water glider, the gap between China′s “Sea Wing” and the US “Spray” and “Slocum” is not large, and it will be bussiness applied soon. By the way, through the improvement of the operational mechanism of marine technology equipment and the active development of maritime scientific research voyage missions, the experience of submersible operations should be continuously accumulated.
Key words:Ocean scientific survey,Humanoccupied vehicles,Unmanned underwater vehicle,Submergence depth,Marine technical equipment
0引言
海洋为人类提供丰富的生物、天然气、石油和矿产等资源。潜水器是水下科考仪器设备的重要载体,在维护国家海洋权益、开发利用海洋资源、保护海洋生态环境和谋求海洋发展空间等方面发挥十分重要的作用。可以说,国家的潜水器装备技术水平代表其在海洋领域的发展程度和综合实力[1]。
与常规的船载海洋装备不同,潜水器具有水下移动能力,可搭载多种仪器设备开展水下探测和采样,也可载人完成特定的水下作业,用途广泛。潜水器可分为载人潜水器(HOV)和无人潜水器(UUV),其中无人潜水器又可分为无人有缆式潜水器(ROV)[2]、无人自治式潜水器(AUV)[3]和水下滑翔机[4]等。
美国伍兹霍尔海洋研究所(WHOI)成立于1930年,聚集和培养全球最优秀的海洋科研和技术人员,海洋装备技术水平全球领先,拥有种类最全和性能最好的潜水器以及较为完善和高效的潜水器运行管理制度。本研究梳理WHOI和我国主要潜水器的技术指标和应用情况,并通过对比提出我国的优势和不足,为我国潜水器的发展尤其是业务化应用提供参考。
1载人潜水器
11美国“Alvin”号
“Alvin”号[5]建造于1964年,是全球最早建造的载人潜水器之一。其初始设计下潜深度为1 829 m,1974年完成第一次技术升级改造后的设计下潜深度为4 500 m;可搭载2名科学家和1名潜航员,到达全球约63%的海底,每次下潜时间为6~8 h,主要应用于海洋生物采样和地质研究。
作为全球应用效率最高的载人潜水器,“Alvin”号完成的作业任务颇具影响、贡献卓越:1966 年初与另一台遥控潜水器共同在地中海海域成功打捞美国海军掉落的1颗氢弹;1977年在深度近2 500 m的加拉帕戈斯断裂带首次发现海底热液喷口及其周边生物群落;1979年在东太平洋洋中脊首次发现高温黑烟囱;1986年成功参与对“泰坦尼克”号沉船的搜寻和考察。
由于“Alvin”号服役时间较长,WHOI于2012年对其开展分阶段的升级改造工作,主要内容包括:使用钛合金材料新建载人球,设计下潜深度达6 500 m,并加大载人球内径;改进内舱的人-机工程学设计,观察窗增至5个,实现前向观察无死角;有效载荷增至约181 kg,并延长作业时间;改进照明、摄像和光缆数据采集等系统,并采用新型轻质电池,续航时间提高到8~12 h。
12我国“蛟龙”号
我国载人潜水器发展较晚,在2002年国家“7 000米级载人潜水器”重大专项批准设立前,载人潜水器的最大下潜深度只有600 m[6]。“蛟龙”号是目前我国最先进的载人潜水器,也是全球下潜深度最大的载人潜水器。自2013年完成7 000米级海试以来,“蛟龙”号于2013—2017年已开展4个试验性应用航次,获取大量生物和地质样品以及海底地形地貌资料。目前“蛟龙”号已完成首次大修和升级工作,主要内容包括提升海底探测、通信和采样等能力以及改进液压和抛载系统,并将于2020年左右进入业务化运行阶段。
13中美载人潜水器应用对比
截至2018年,“Alvin”号和“蛟龙”号的应用情况如表1所示。
由表1可以看出:由于我国载人深潜技术装备发展较晚,“蛟龙”号在下潜次数、累计下潜时间和累计下潜人数方面远远落后于“Alvin”号;与此同时,“蛟龙”号在平均下潜深度的关键指标上具有优势,主要原因是其作业区域主要分布在印度洋洋中脊和西北太平洋马里亚纳海沟等海底深渊。
2无人潜水器
21无人有缆式潜水器
与载人潜水器相比,无人有缆式潜水器适用母船的范围更广,但对母船的要求更严格。①母船须具有动力定位系统:潜水器通过光电复合缆与母船连接,从而传输电力、信号和影像等;②母船须具有足够的甲板空间:人员通常在甲板上的集装箱内遥控操作潜水器,集装箱内除仪器设备外还须容纳总指挥员、数据记录员、机械手操作员和作业辅助员等至少5名人员,因此体积较大。
211美国“Jason”号
“Jason”号是由WHOI设计和建造的无人有缆式潜水器,最大下潜深度为6 500 m,具有高精度水下探测和采样能力。“Jason”号采用高耐压的浮力材料,在水下作業时为中性浮力状态,能源完全依靠船载动力装置,并配备声呐、影像、照明和数字采样系统。自2002年以来,“Jason”号的下潜次数超过1 000次,平均下潜时间为21 h,最长下潜时间达100 h。
212我国“海龙”系列
“海龙”系列[7]由我国大洋协会主持研究,并由上海交通大学自主研制,可对深海热液区周边的生物和极端环境下的微生物进行采样,其中最先进的为“海龙Ⅲ”号。“海龙Ⅲ”号由潜水器本体、脐带缆、脐带绞车、止荡器、操作控制台和动力站等多个系统组成,最大下潜深度为6 000 m,可搭载多种仪器设备,具有海底自主巡线和重型工具作业能力。
213中美无人有缆式潜水器技术参数对比
“Jason”号和“海龙”系列的技术参数如表2所示。
由表2可以看出,“海龙”系列与“Jason”号在最大水下航速方面差距较大,主要原因是“海龙”系列仍处于海试阶段,与母船之间需要较长时间的作业磨合,其性能将在不断应用中有所提升。
22无人自治式潜水器
221美国“Sentry”号和“REMUS”系列
“Sentry”号是2010年最新研制的具有6 000 m深度水下探测能力的潜水器,与其前代“ABE”号相比移动更灵活、航速更快和航程更远,近底航行和载荷能力显著提高。“Sentry”号对母船要求较低且适用广泛,因此不仅可独立水下作业,而且可与“Alvin”号或“Jason”号同船联合作业,并为其他潜水器提供海底地形地貌和水文等的数据支持,从而提高作业效率。与载人潜水器的人员水下操作和无人有缆式潜水器的人员遥控操作不同,“Sentry”号具有完全自主的水下航行能力:通过将海底路径下载到艇载控制单元,结合预置控制算法,潜水器可安全、及时和有效地规避水下障碍物,真正实现“无人驾驶”。
WHOI在美国海军支持下研制的“REMUS”系列远程环境监测装置[8]是可实现多任务作业的小巧型潜水器。与“Sentry”号相比,“REMUS”系列的载荷能力有所降低,但体积更小和重量更轻,因此具有更低的能耗和更长的续航时間。目前“REMUS”系列已形成下潜深度为100~6 000 m的谱系化产品,其中“REMUS6000”曾被应用于打捞法航失事客机的黑匣子,其在水下利用声呐与母船互通以确定所处位置,利用高分辨率侧扫雷达扫描海底地形并绘图,利用磁力探测器探测金属物体,利用摄像机进行光学成像,从而便于人员观察和分析目标。
222我国“潜龙”系列
“潜龙”系列目前包括“潜龙一号”“潜龙二号”和“潜龙三号”[9]。“潜龙一号”是由我国与俄罗斯共同研制的“CR01”系列改造而成的6 000米级无人自治式潜水器,采用回转体形式,可完成海底微地形地貌精细探测、海底水文参数测量和海底多金属结核丰度测定等任务;“潜龙二号”和“潜龙三号”是完全由我国自主研制的4 500米级无人自治式潜水器,采用鱼型仿生形式,具有更好的运动灵活性和水中状态,并集成海底热液异常探测、海底微地形地貌探测和海底磁力探测等技术。
223中美无人自治式潜水器技术参数对比
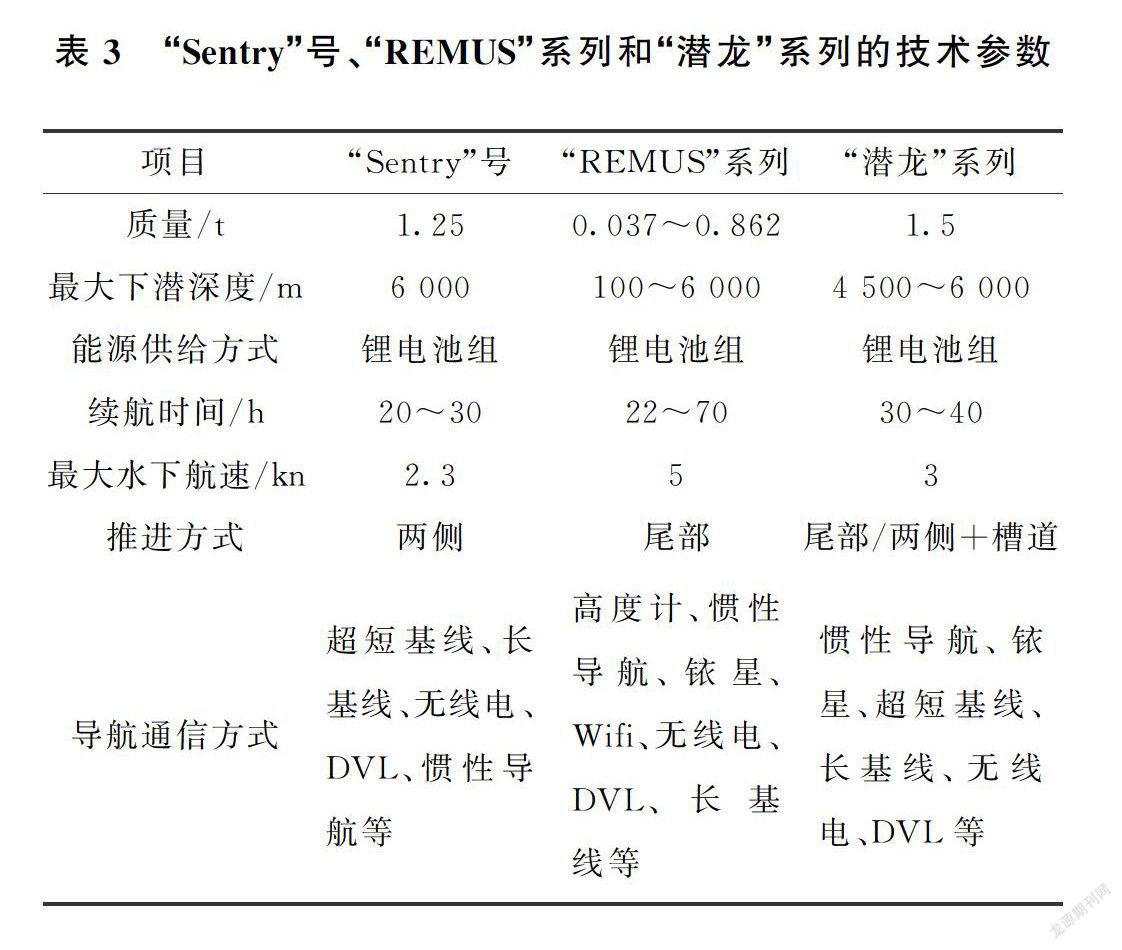
“Sentry”号、“REMUS”系列和“潜龙”系列的技术参数如表3所示。
由表3可以看出,“潜龙”系列与“Sentry”号和“REMUS”系列差距不大。近年来美国在该领域的研制重点为“REMUS”系列,并积极发展潜水器集群化作业;我国天津大学、中国科学院沈阳自动化研究所和哈尔滨工程大学等也在研制小型无人自治式潜水器,但在潜水器协同化作业和系列化生产等方面还有不足。
23复合型潜水器
无人有缆式潜水器作业能力强,但受缆绳制约,作业范围小;无人自治式潜水器不受缆绳制约,作业范围大,但作业能力有限。因此,复合型潜水器(HROV)应运而生[10],其作业范围大且作业能力强,可满足海洋科考需求。
231美国“NEREUS”号和“NUI”号
“NEREUS”号是具有自治和有缆2种工作模式的复合型潜水器,可与无人自治式潜水器一样在海底自由航行和扫描,也可通过加装设备而具有无人有缆式潜水器的作业功能,并通过直径约为人类发丝3倍的微细光纤与母船之间高速传输影像数据和控制信号。“NEREUS”号的耐压舱采用轻质陶瓷材料,在保护电子元件的同时提供浮力,并通过可充电的锂电池组获得能源。
“NUI”号是为冰下作业而专门研制的复合型潜水器,额定下潜深度为2 000 m,可在冰下航行超过40 km,同样采用微细光纤和电池能量包,此外配置声学、化学和生物传感器以及1台7功能液压机械手。2014年“NUI”号首次成功完成北极冰下科考,母船为“Polarstern”号极地破冰船。
232我国“海龙11000”号
“海龙11000”号是由上海交通大学自主研制的万米级深海复合型潜水器,设计最大下潜深度为11 000 m,其系统方案、总体方案和控制方案大量采用创新技术,其中可加工浮力材料和多芯贯穿件等均为我国自主创新成果。2018年在执行我国大洋第48航次科考任务的“大洋一号”船上,“海龙11000”号开展全面的系统检查和功能测试,并在西北太平洋海山区完成6 000米级大深度试验潜次,最大下潜深度达5 630 m,下潜时间达13 h,开展 4 h 的近底高清探测,完成5次共320 m的母船-潜水器联动移位。
233中美复合型潜水器技术参数对比
“NEREUS”号、“NUI”号和“海龙11000”号的技术参数如表4所示。
由表4可以看出,“海龙11000”号与“NEREUS”号和“NUI”号差距不大。我国应重点研制高载荷和可在冰下作业的复合型潜水器。
24水下滑翔机
水下滑翔机是新型潜水器,利用微型泵移动电池组和油液,通过调整自身姿态和浮力获得推进力,能耗极小,续航时间更长,并可搭载多种传感器,非常适合在广阔海域开展水下作业。水下滑翔机可集群编队和昼夜不停地探测和记录水下时空特征,在浮出水面时与母船进行数据和指令传输,与传统潜水器相比节约巨大成本。然而由于以浮力为动力,水下滑翔机仅能以锯齿状前进和螺旋状回转的形式航行,航速较慢,且易受波浪的影响。目前WHOI拥有“Spray”号[11]和“Slocum”号[12]2种水下滑翔机。
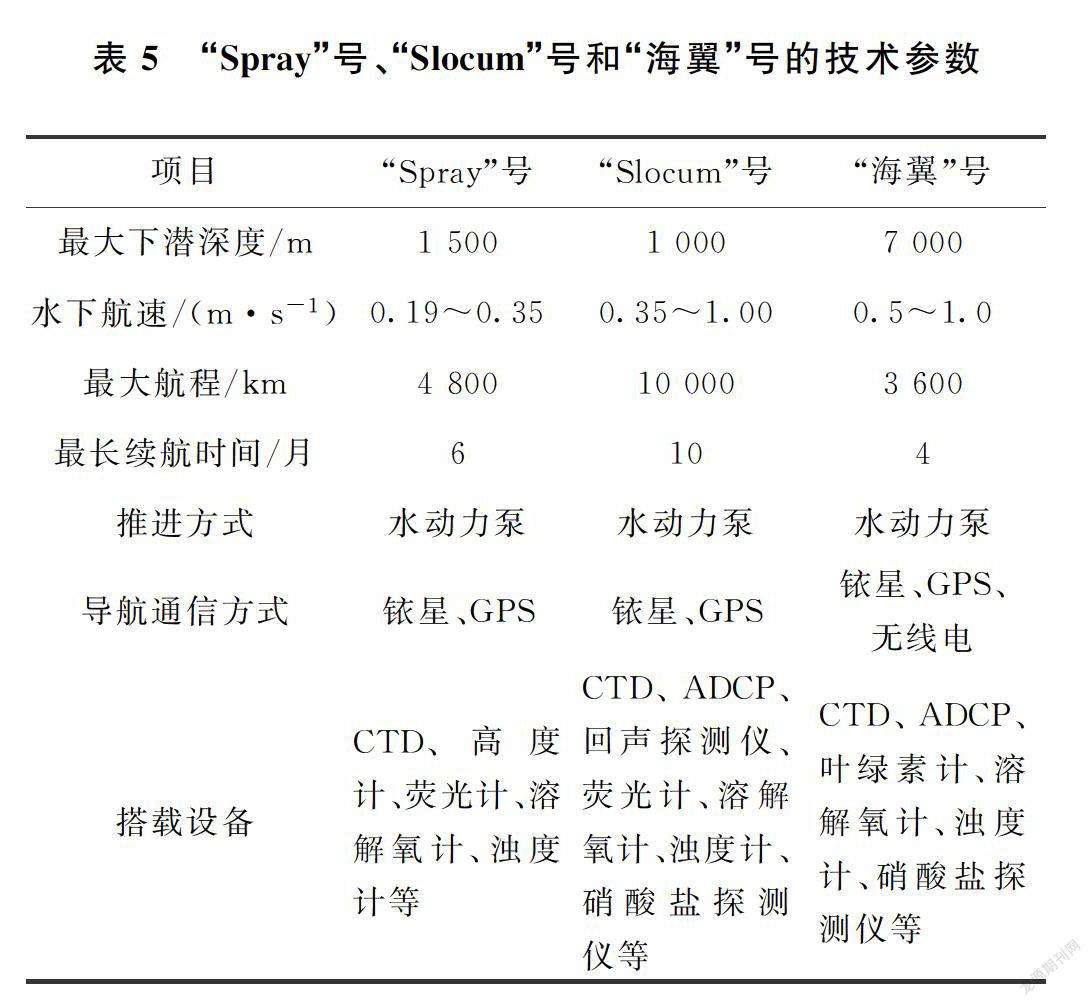
中国科学院沈阳自动化研究所自2003年开展水下滑翔机的基础研究工作,并于2005年成功研制我国首台水下滑翔机原理样机,突破多模块控制、模块化结构和光纤微缆应用等一系列关键技术,并顺利完成湖试;在国家“863”计划的支持下,与中国科学院海洋研究所共同开展水下滑翔机工程样机的研制工作,并于2008年成功研制具有自主知识产权的水下滑翔机工程样机。该样机于2009—2011年以“科学”号科考船为母船,成功完成多次海试和回收,各项指标均正常,并获取大量试验数据和积累丰富作业经验;于2012年在我国东沙群岛附近海域再次成功完成海试,进一步验证系统的稳定性和可靠性,同时积累复杂海流环境下作业的宝贵经验,为我国水下滑翔机的推广和应用打下基础;于2014年完成长航程试验,续航时间长达1个月,航程长达1 000 km,创造我国自主研制水下滑翔机的新纪录。2018年我国第九次北极科考成功布放我国自主研制的水下滑翔机“海翼”号[13],其在白令海海盆和陆坡区开展为期44 d的连续和高密度水下探测,获取229个温度和盐度剖面,极大提升“雪龙”号极地科考船的北极科考能力。
由表5可以看出,“海翼”號与“Spray”号和“Slocum”号差距不大。我国水下滑翔机已有一定的研制基础,水下滑翔机的性能也逐渐提高,即将进入业务化应用阶段。
3结语
目前我国在潜水器集成和制造方面与美国差距不大,某些技术指标甚至保持领先。与此同时,由于我国潜水器发展较晚,在业务化应用方面仍与美国存在较大差距。对此,我国应通过完善海洋技术装备运行机制和积极开展海上科考航次任务,不断积累潜水器作业经验,让更多的潜水器走出实验室、进入深海大洋。
参考文献
[1]封锡盛,李一平,徐红丽.下一代海洋机器人 写在人类创造下潜深度世界纪录10 912米50周年之际[J].机器人,2011,33(1):113-118.
[2]MURASHIMA T,NAKAJOB H,YOSHIDA H.7 000 m class ROV KAIKO 7000[A].IEEEMTS Ocean Conference[C].2004.
[3]孟令帅,林扬,郑荣,等.模块化自主水下机器人的机械设计与实现[J].机器人,2016,38(4):395-401.
[4]刘雁集,马捷.海洋水下滑翔机浮力调节系统的设计与实验[J].装备环境工程,2018,15(12):45-49.
[5]AMANDA N N,JOANNA D K,STEPHANIE L B.First HOV Alvin study of the pelagic environment at Hydrographer Canyon (NW Atlantic) [J].Deep Sea Research Part Ⅱ:Topical Studies in Oceanography,2018,4(150):30-40.
[6]刘峰,李向阳.中国载人深潜“蛟龙”号研发历程[M].北京:海洋出版社,2016.
[7]葛彤.作业型无人遥控潜水器深海应用与关键技术[J].工程研究:跨学科视野中的工程,2016,8(2):192-200.
[8]EDOARDO I S,MANHAR R D.A USVbased automated launch and recovery system for AUVs[J].IEEE Journal of Oceanic Engineering,2017,42(1):37-55.
[9]杨磊,杜志元,陈云赛,等.我国三类典型深海运载装备应用技术研究[J].海洋开发与管理,2018,35(9):100-106.
[10]LOUIS L W,MICHAEL V J,JAMES C K.Navigation and control of the nereus hybrid underwater vehicle for global ocean science to 10 903 m depth:preliminary results[A].IEEE International Conference on Robotics and Automation[C].2010.
[11]SHERMAN J,DAVIS R E,OWENS W B.The autonomous underwater glider “Spray”[J].IEEE Journal of Oceanic Engineering,2001,26(4):437-446.
[12]WEBB D C,SIMONETTI P J,JONES C P.Slocum:an underwater glider propelled by environmental energy[J].IEEE Journal of Oceanic Engineering,2001,26(4):447-452.
[13]YU J C,ZHANG A Q,JIN W M.Development and experiments of the Seawing underwater glider[J].China Ocean Engineering,2011,25(4):721-736.