基于智能传感器的新型巡检机器人应用研究
2019-09-10宋晓帆陈晨樊庆玲董平先申燕飞
宋晓帆 陈晨 樊庆玲 董平先 申燕飞

摘 要:目前,机器人巡检技术的智能化程度很高,能够解决变电站巡检任务的艰巨性、重复性和高风险所带来的大部分问题。但是,由于作业现场的复杂环境及天气变化、巡检对象的多样性等原因,要求变电站巡检机器人的作业能力和作业范围覆盖变电站巡检任务的所有方面是不现实的。因此,本文主要研究了用于检测变电站设备状态以及弥补变电站巡检机器人作业范围不足的新型智能传感器,并将变电站巡检机器人、现有变电站状态检测系统和新型智能传感器进行协同和信息融合,构建了变电站智能化人工智能巡检体系。
关键词:变电站巡检机器人;智能传感器;智能传感器自主协同网络
中图分类号:TP242 文献标识码:A 文章编号:1003-5168(2019)10-0019-03
Abstract: At present, the robotic inspection technology is highly intelligent, it could solve majorities of problem because of the difficult,repetitive high-risk inspection tasks in substation. However, on account of the complicated environment or weather variations and diversities of patrol object in the working site, it is unpractical that the patrol robot can cover all substation inspection tasks not only working capacity but also the operating area. Therefore, this paper mainly studied the new intelligent sensor used to monitor equipment in substation and made up the insufficient scope of operation, and unitied substation patrol robot with condition monitoring system at present with new-type intelligent sensor to form artificial intelligence inspection system in substation.
Keywords: substation patrol robot; intelligent sensor; intelligent sensor autonomous collaborative network
1 概述
目前,我国大多数220kV及以下电压等级的变电站已经实现了无人值班,但是,电网公司仍然面临着变电站巡视检查工作的巨大压力。与此同时,传统变电站人工巡视检查模式的不足也逐步凸显,存在劳动强度大、巡视检查效率低、人工成本高、易受到巡视人员的技术背景和经验影響等问题。因此,采用各种先进技术和方法实现自动巡检并进行智能化判断提升变电站运维的自动化水平是变电站公司的重大需求,也是未来发展方向。拓展变电站巡检机器人的能力,研制新型智能传感器,构建多系统协同的变电站人工智能巡检体系,不仅是电力系统的发展需要,也是新技术发展和应用的必然趋势[1-4]。
2 智能传感器技术应用
传感器是一种检测装置,能感受到被测量的信息,并将检测感受到的信息,按一定规律变换成电信号或其他所需形式的信息输出,以满足信息传输、处理、存储、显示、记录和控制等要求。
2.1 新型智能传感器
相关变电站公司针对变电站巡检机器人存在多种巡检盲点的实际情况,考虑到现有变电站电气设备状态检测系统的覆盖范围,研制出新型压力智能传感器、超声波智能传感器、指针式表计自动读值传感器以及端子箱综合传感器等,这是实现变电站巡检全覆盖的必然要求。
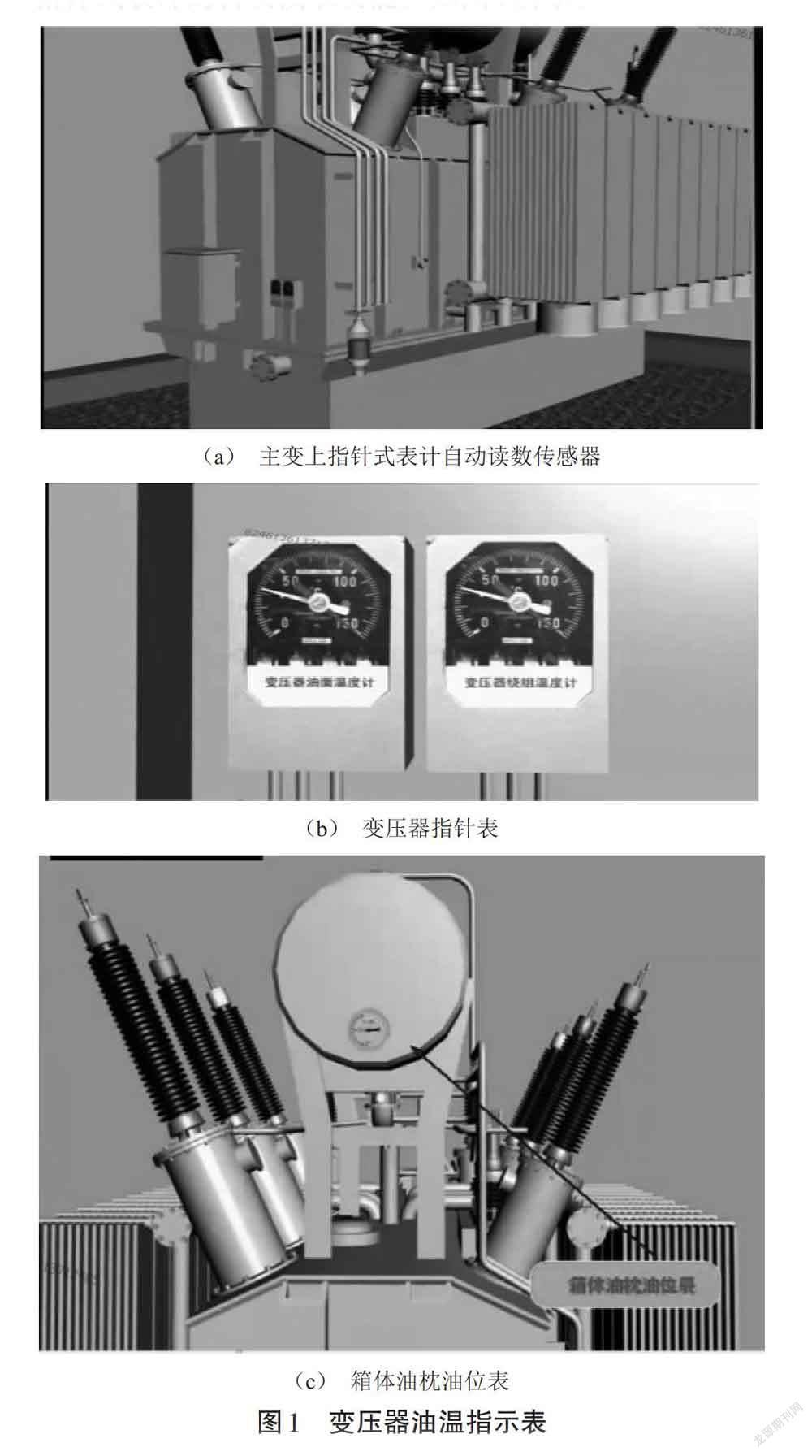
基于图像识别的指针式表计自动读值传感器是对于指针仪表图像,根据机器视觉技术和图像处理相关技术,采用深度学习的方式,对所拍摄的仪表图片进行分类,采用带色彩恢复的多尺度Retinex算法提高处理程序的光照鲁棒性;根据小孔成像原理,采用正视变换算法提高处理程序的拍摄角度鲁棒性能;采用Hough变换算法配合图像处理中的自适应二值化和细化等算法获取仪表指针示数[5]。通过在主变上安装指针式表计自动读数传感器,可从变压器指针表计上读取数据,传输数据,实现对指针式表计的自动读取功能。如图1所示。
2.2 构建智能传感器自主协同网络
由现有电气设备状态检测系统、压力智能传感器、超声波智能传感器、指针式表计自动读值传感器和端子箱综合检测智能传感器构建智能传感器自主协同网络。智能传感器网络架构研究,根据智能传感器网络覆盖面及通信接入点选择网络物理结构,结合协同作业需求制定信息交换模式、通信协议和通信接口形式。智能传感器网络将采用多个传感器有线通信链路汇集、无线通信接口多点接入的方式。
3 变电站模块式布点巡检覆盖面
针对220kV变电站,采用如图2所示的平面布局图进行覆盖面校验,具体步骤如下。①根据变电站平面布置的模块式分区情况,明确设备巡检内容。第一,220kV配电区位于站区南侧,采用户外双I型HGIS设备,主要检测对象为HGIS设备温度、气体密度等指标。第二,110kV配电区位于站区北侧,采用户外改进型单母线分段HGIS双列布置,主要检测对象为HGIS设备的温度、气体密度等指标。第三,站区中部区域布置主变压器、10kV配电装置室、二次设备室等,电容器组竖列布置于站区西侧,主要检测对象包括主变压器油位、油面温度、绕组温度、散热片情况及其他设备温度和湿度。②将包含上述检测对象的电气设备指针式表计装置、具有无线通信接口的智能传感器以及设备状态检测系统的接入装置作为巡检定位分析点,以圆点代表。③利用配电区之间的环形道路作为变电站巡检机器人的巡检通道。通过巡检路径规划,达到变电站设备巡检全覆盖[6-10]。
4 智能巡检机器人
4.1 机器人技术应用
变电站巡检机器人未来发展趋势是机器人与人工智能的深度融合以及与变电站电气设备技术的协同。随着人工智能的迅猛发展,智能化方法能模拟人的经验,逼近非线性,具有自组织、自学习功能,并具有一定的容错能力。这些方法应用于路径规划会使变电站巡检机器人在动态环境中更灵活、更智能。同时,变电站电气设备状态检测技术与变电站巡检机器人数据协同将为智能变电站和无人值守变电站提供创新性的技术检测手段和全方位的安全保障,更快地推进变电站无人值守的进程。
4.2 机器人自主巡检路径规划技术
4.2.1 技术原理。自主导航控制是移动机器人技术的基本环节,也是巡检机器人执行任务的首要必备条件。机器人路径自主规划技术中GPS定位寻迹技术,主要原理是利用围绕地球运转的卫星与用户设备之间的距离随导航时间坐标的变化值,从GPS导航信息中求解出卫星的位置信息,从而在接收机中求解出载体的位置信息。
4.2.2 基于220kV变电站设计方案的机器人巡检路径优化。①优化充电室位置。充电室是机器人的能源补充场所。本次设计方案中综合考虑巡检机器人的充电室位置,具体优化如下:第一,合理选取充电室位置,结合变电站设计方案,将机器人充电室布置于220kV配电区东北角,位于变电站中部区域且紧邻主干道路,确保机器人每次从充电室出发完成单个巡检任务的巡检路程尽量接近,便于各区域最短路径规划;第二,充电室避免布置于母线正下方,以免对无线通信产生影响。②巡视路径规划。第一,分區域设置巡视路线,可均匀分配各配电区充电时间和巡视时间,确保站内一次、二次设备全覆盖;第二,全局路线规划,即以路径长度最短、转弯次数最少、综合策略最优为标准,每条轨道的巡检点应统一放置在轨道一侧,并选择距离设备较近的道路进行巡视,同一条道路尽量不走往返,减少机器人行走路程与转弯次数;第三,局部路径规划,在全局规划的基础上,对采集到的周围环境数据进行综合分析,给出机器人实时路径信息,即运动速度和转向角命令[11]。
5 结语
智能传感器采用巡检机器人取代人工巡检,能够更有效地保证设备的巡视质量,提高工作效率,降低运行人员的工作强度,并集中解决恶劣天气下巡检难度大和安全风险高的问题。作为一种在无人值守变电站推广应用的新型技术检测手段,能够进一步提高国家电网公司巡检工作的可靠性和安全性。本文的研究将实现变电站巡检机器人、新型智能传感器以及现有变电站设备状态检测系统的多系统自主协同合作,有效提升各系统的综合应用效果,大大提高变电站设备状态检修的工作效率,降低电力巡检过程所带来的安全风险,从而提高电网公司变电站运维的自动化水平和安全水平。同时,也为建立更加完善的变电站智能化运维体系打下良好的技术基础[12]。
参考文献:
[1]杨大丽.传感器技术的应用与发展趋势分析[J].科技信息(科学教研),2007(24):366,370.
[2]李景丽,陈瑞球.我国传感器现状及发展趋势[J].仪表技术,2003(5):39-40.
[3]谷有臣,孔英,陈若辉.传感器技术的发展与趋势综述[J].物理实验,2002(12):40-43.
[4]Lindsey S, Raghavendra C, Sivalingam K M. Data Gathering Algorithms in Sensor Networks Using Energy Metrics[J].IEEE Transactions on Parallel and Distributed Systems,2002(9):924-935.
[5]潘震中.用于目标分类的多传感器的数据融合[J].无线电通信技术,2004(8):69-73.
[6]周立辉,张永生,孙勇,等.智能变电站巡检机器人研制及应用[J].电力系统自动化,2011(19):85-88.
[7]赵坤.变电站智能巡检机器人视觉导航方法研究[D].北京:华北电力大学,2014.
[8]张彩友,冯华,付崇光,等.变电站巡检机器人GPS导航系统设计[J].微计算机信息,2010(29):166-168.
[9]王凯.变电站巡检机器人关键技术及系统的研究与实现[D].成都:电子科技大学,2015.
[10]杨旭东,黄玉柱,李继刚,等.变电站巡检机器人研究现状综述[J].山东电力技术,2015(1):30-34.
[11]朱兴柯,叶飞,李斌,等.变电站巡检机器人运动控制系统研究[J].机电信息,2014(30):122-124.
[12]胡启明,胡润滋,周平.变电站巡检机器人应用技术[J].华中电力,2011(24):36-43.
