高分辨率多波束测深系统在长江口河底目标物探测中的应用
2019-09-10付五洲舒国栋李涛陆彬
付五洲 舒国栋 李涛 陆彬


摘要:多波束测深系统分辨率高、覆盖范围较大,广泛应用于航道维护、工程施工、水下目标物探测中。通过采用Reson SeaBat 7125 SV2多波束测深系统对长江太仓段河道进行扫测,能够精准定位沉船、集装箱、机器吊臂的位置以及其形态,能够识别小尺寸(3.5mx3.5m)的构筑物,可为救助打捞提供科学指导。结果表明,多波束系统可为河道应急抢险、小尺寸目标物探测以及形态分析提供精准数据。
关键词:高分辨率多波束测深系统;河道扫描;小尺寸目标探测;河道应急抢险;长江太仓段
中图法分类号:U675.4
文献标志码:A
DOI: 10.15974/j.cnki.slsdkb.2019.10.003
多波束测深系统是一种条带式测深系统,是当前进行水下地形测量最先进的技术之一,具有覆盖范围广、精度高、自动化、效率高的特点。随着电子技术、新材料、新工艺的飞速发展,多波束测深系统朝着小型化、集成化发展,突破了传统单波束测深的局限,能够高效获取水下面状数据,从而实现由“点”向“面”的跨越[1-3]。
随着我国经济的快速发展,内河航运需求愈来愈大,航道日益繁忙,船舶总吨位逐渐增大,船舶的通航安全得到高度重视。长江口内河航道具有流速多变、水位变化大、河道弯曲、河床地形复杂、含沙量高的特点,遇到应急情况时,需要快速、准确地探测碍航物的位置、形态等,以便快速打捞,确保通航安全[4-5]。
常用碍航物探测方法是侧扫声呐,但因其以平面影像方式呈现,只能对河床地貌做描述性区分,无法有效辨别碍航物的形态,而多波束测深系统不仅能够获取平面位置,还能够通过测深点云对河底进行三维成像,并实现三维可视化,更加直观地确定碍航物属性及形态[6]。
1 多波束测深原理
多波束测深系统主要由发射基阵、接收基阵和数据处理器组成,发射基阵多与接收基阵垂直,发射基阵平行于船纵向排列,接收基阵沿船横向排列[7]。
图1为多波束测深系统工作原理示意图。通过换能器发射和接收信号分别在某一方向上形成较小的方向角,而在垂直的另一方向形成较宽的方向角,不停地发射与接收信号[8-9]。在测深原理上,多波束测深系统分为束控法和相干法[10]。
1.1 束控法
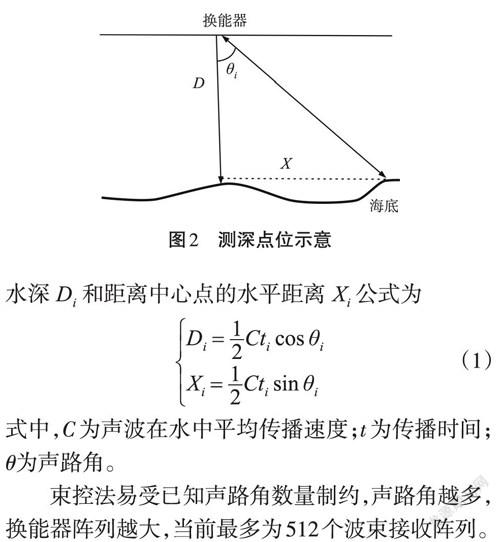
束控法是指接收基阵对发射波束进行定向接收,通过对回波信号的检测,记录反射波束传播的时间t和已知声路角θ,其各声路角对应的各测点示意见图2。
在忽略波束射线弯曲的条件下,各波束测点的水深Di和距离中心点的水平距离Xi公式为式中,C为声波在水中平均传播速度;t为传播时间;θ为声路角。
束控法易受已知声路角数量制约,声路角越多,换能器阵列越大,当前最多为512个波束接收阵列。
1.2 相干法
相干法又称虚拟波束,是指多波束换能器在进行一次短脉冲水底扫描后,反射的回波信号被换能器的接收阵列按照一定的相位差接收。根据相干原理,换能器的固定相位差和反射波束声路角存在固定关系,从而计算出声路角大小,再结合公式(1),可计算测点水深及偏置[11]。
多波束测深系统关键技术在于斜距和声路角两个变量的计算。通过计算两个变量能获得垂直方向波束覆盖范围内的水深值,快速测出沿航迹线方向一定范围内水下目标尺寸。
2 Reson SeaBat 7125多波束测深系统工作方式
丹麦Reson SeaBat 7125 SV2多波束测深系统属于中水深双频高分辨率多波束系统,采用传统的束控法工作原理,接收阵列可接收512个波束。其主要通过7-P高性能声呐处理器,运用FPGA技术实现专业数据和信号处理[12],其具体参数见表1。
Reson SeaBat 7125多波束测深系统获取精确地水下点云数据,还需要一些外部传感器(如GNSS、姿态传感器、表面声速仪、声速剖面仪),以及数据采集及处理软件PDS2000。SeaBat 7125多波束测深系统在野外安装和數据后处理中拥有一套严格的流程,以保障数据质量。
换能器常采用舷侧安装,一般安装在距船首1/3处,可减小船体震动和噪声对仪器的影响。通过外部GNSS提供定位信息和lpps进行时钟同步,外部Octans光纤罗经提供横摇/纵摇/艏摇0.10,涌浪5cm的动态精度数据,实时修正多波束姿态,保证发射和接收在同一基准;多波束校准的横摇、纵摇、艏向直接决定着数据质量,数据后处理通过吃水改正、潮位改正、声速剖面改正,最终获得一定基面下水深值。
3 应用实例
长江太仓段呈现上游窄、下游宽的格局,整个河势呈喇叭型,航道水深约15m,底质组成主要由粉质黏土、细砂和粉砂。该区域码头密布、航道繁忙,散落的水下构筑物为安全通航埋下了隐患。该区段内时有沉船、集装箱落水等事故发生,可使用ResonSeaBat 7125 SV2多波束测深系统进行应急处理。
3.1 沉船
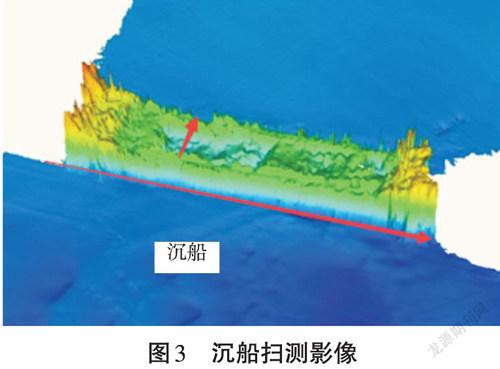
在某次货船碰撞中,其中一艘货船沉没,船长53.6 m,宽15 m,通过扫测发现沉船位置,具体见图3。沉船处水深约22 m,沉船形态为正面朝上,能够清晰判别船头船尾及货仓位置,货仓内货物清晰可见;沉船后最浅区域深13 m,对通航造成潜在安全风险。通过多波束测量,精确地确定沉船位置及形态,为船体打捞工作提供依据。
3.2 集装箱
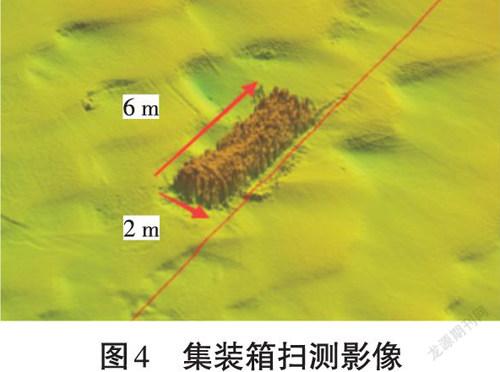
在某次货轮倾覆中,集装箱散落江中,集装箱尺寸为5.8 mx2.3 mx2.3 m,均为钢性结构。通过多波束测深系统扫测精确定位,具体见图4。集装箱具有强烈的反向散射特性,且强于底质[13],在天然的河床上呈现一个规则矩形凸起,有助于快速对其位置进行判别和实施打捞。
3.3 机器吊臂
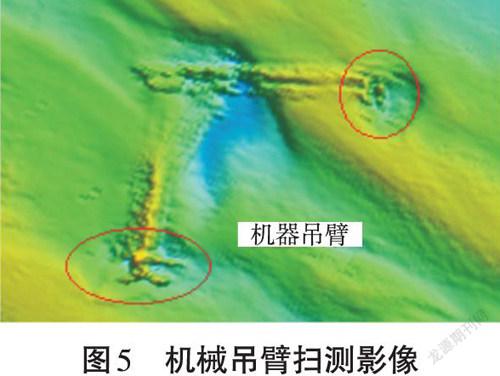
在江苏省太仓市石化码头前沿扫测中,发现一散落已久的机械吊臂,水深7m,经多波束扫测,结果见图5。从图中可清晰看到吊臂形状,且吊臂部分与淤泥融为一体,吊臂两端对水流有一定影响,形成两个小冲刷坑。
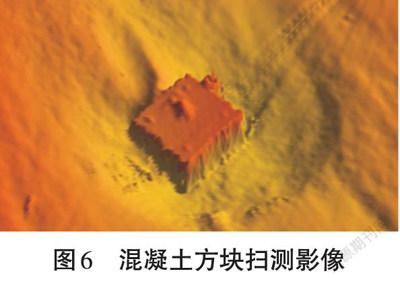
3.4 混凝土构筑物
在江苏省太仓市武港码头内侧,水深4m处,发现一个3.5 mx3.5 m混凝土方块,轮廓清晰可见,具体见图6。
4 结论与建议
本文结合多波束测深技术全覆盖、高精度的特点展开,多波束系统能够高效、精确地显示河底三维地貌,通过一定的人工干预,可对河底地物的属性、形态进行精准判别。
(1) SeaBat7125 SV2型多波束测深系统能够在浅水区域得到较好的回波信号,如混凝土构筑物的扫测清晰可见。
(2)多波束测深系统分辨率高,能够清晰地扫测出小尺寸目标,为应急监测提供有效的技术支撑,如扫测散落的集装箱。
(3)粉质黏土、细砂、粉砂底质具有较强的反向散射特性,而铁质物品的反向散射更强烈,能够被区分辨别。
多波束测深系统发展至今,已成为水下地貌测量的重要方式,但仍有许多问题需要深入研究,如姿态自校准及多波束数据后处理自动化,噪声滤波去除等。
参考文献:
[1]赵建虎,振波,王爱学.海洋测绘技术发展现状[J]测绘地理信息,2017,42(6):1-10.
[2]毕永良,孙毅.海洋测绘技术研究进展与展望[J].海洋测绘,2004,24(3):65-69.
[3]许开勇,徐世毅.多波束系统和水下机器人技术在内河航道应急测量中的用[J]中国水运,2019(1):60-63.
[4]邹双朝,皮凌华.基于水下多波束的长江堤防护岸工程监测技术研究[J].长江科学院院报,2013,30(1): 93-98.
[5]刘忠臣,周兴华.浅水多波束系统及其最新技术发展[J].海洋测绘,2005,25(6):67-70.
[6] 严峻,多波束与侧扫声呐高质量测量信息获取与叠加[J].测绘学报,2019,48(3):400.
[7] 阳凡林,刘经南,赵建虎.多波束测深数据的异常检测和滤波[J].武汉大学学报,2004,29(1):80-83.
[8]黃谟涛,翟国君。多波束和机载激光测深位置归算及载体姿态影响研究[J].测绘学报,2000,29(1):82-87.
[9] 李成钢,王伟伟,阎军,传统多波束系统与具有相干特点的多波束系统的研究[J].海洋测绘,2007,27(2):77-80.
[10]唐国民.浅谈Reson SeaBat 7125多波束在航道测量中的应用[J].中国水运,2016,10(4):66-71.
[11]罗劲松.浅谈Reson SeaBat T20-P多波束在内河航道的应用[J].中国水运,2019,19(1):148-149.
[12]李海森,鲁东,周天.基于FPGA的多波束实时动态聚焦波束形成方法[J].振动与冲击,2015,22(3):83-88.
[13]金绍华,翟京生.Simrad EM多波束反向散射强度数据精处理研究[J]测绘科学,2010,35(2):106-108.
(编辑:唐湘茜)
