基于均值漂移的车道线检测模型
2019-09-10韩高格方周夏盼葛东东
韩高格 方周 夏盼 葛东东

摘 要:无人驾驶、辅助驾驶是目前人工智能领域最火热的前沿研究方向之一,它具有巨大的商业价值和发展前景.道路车道线检测是无人驾驶系统中几个重要核心技术之一,它可以为无人驾驶系统提供行驶决策规划、外部感知.本文提出了一种基于均值漂移的道路车道线检测算法,首先对道路图像的车道线区域进行感兴趣区域(ROI)选取,再进行下采样处理和逆透视变换.再进一步采用基于均值漂移算法对道路图像进行图像分割,对分割所得的车道线进行非线性回归方法拟合车道线.实验表明,该方法可以有效检测出道路车道线,可以适应复杂道路场景中的阴影、遮挡、模糊、弯曲道路等情况中的车道线检测,并且具有鲁棒性好、精确度高的特点.
关键词:车道线检测;无人驾驶;均值漂移算法;图像分割
中图分类号:TP391 文献标识码:A 文章编号:1673-260X(2019)11-0051-03
1 引言
近年来,无人驾驶技术日趋火热,随着社会经济发展、城市交通的不断完善、汽车数量的增多、高新技术的发展,人们对生活质量有着更高的要求、汽车行驶安全也成为人们关心的话题.无人驾驶技术也应运而生,它可以利用计算机技术帮助人们实现汽车的自动行驶,使人们的生活变得更加智能和便捷、社会的运作更加高效,由于无人驾驶的高度安全性,也将会大大减少交通事故的发生.
无人驾驶系统是一个复杂的计算机控制系统,它包含了很多复杂技术,它分为感知层、认知层、决策层、控制层四层.车道线检测作为无人驾驶系统认知层中关键性技术,是最近几年研究的热点.车道线检测的结果可以为无人驾驶系统提供路径的规划决策、确保汽车的行驶正确以及驾驶辅助系统的车道偏离报警系统.公路车道线容易遭受磨损以及受道路阴影、光照、天气等因素影响,导致车道线模糊不清.所以它是一项十分具有难度与挑战的任务.
到目前为止,多数的车道线检测方式是采用基于道路规则化约束[1]的方式,首先对获取图像灰度化预处理,然后利用一些图像边缘提取算法提取图像的边缘信息,选取一定的感兴趣区域(ROI)进行深度处理,最后利用霍夫变换去拟合道路车道线.这种方案优点是计算资源消耗少,处理速度快,但是对于弯曲道路、等检测效果较差.还有基于图像分割的方式[2],首先将RGB图像转化到CIE颜色空间,采用K均值进行图像分割、提取特征,最后采用二次曲线方法进行车道线的拟合.
本文针对道路车道线检测,提出了一种基于均值漂移的道路车道线检测算法.主要步骤有:(1)图像预处理,对采集到的道路车道线图片,先进行感兴趣区域的选取和下采样处理,用于尽可能地去除与道路无关的图像信息和减少不必要的图像运算.(2)道路图像分割,采用基于均值漂移算法对道路车道线进行图像分割,以获取图像中的车道线.(3)车道线拟合,采用非线性回归的方法去拟合道路车道线,可以高精度的拟合车道线的各种形状.
2 ROI选取和下采样处理
由于原始的道路图像包含了天空、树木等与车道线检测无关的内容,所以为了避免不必要的图像运算,对原图进行ROI选取,尽可能多的包含车道对象.另外,车道線检测无须过高的分辨率,所以进一步进行一定的下采样处理,在不损失车道线检测精度的情况下,最大程度地减少计算机对图像的计算,本文采用的是双线性插值的方法,公式的定义如下:
如果对图像每一个样本点都进行计算以得到其密度最大点,无疑需要进行大量的计算.考虑到从样本点xi开始,最终收敛到点xc,在其质心移动过程中,路径上的那些样本点若进行迭代搜索计算也会最终收敛到点xc.所以在一点搜索结束后,对于其搜索路径上的所有点pi,i=1,2,…,N也进行赋值操作pi=xc,这可以显著降低整幅图片计算复杂度,提升车道线检测实时性.
最后将收敛到同一点的各类像素点合并,本文综合考虑了像素点的颜色相似性以及坐标相似性.若两样本点xi和xj满足条件||xis-xjs||<ts或||xir-xjr||<tr就将两点合并.同时再从新合并的点出发继续进行合并操作,直到碰到不相似的点或者该点已经属于其他类.而对于含有像素点个数少于阈值m的区域,则将它与其最相似的区域合并,达到消除杂点的作用.
4 车道线拟合
多数的插值方法拟合曲线往往拟合曲线的精度不够,本发明采用神经网络进行非线性回归的方法取拟合道路车道线.设置6节点的网络隐藏层,采用tanh激活函数进行非线性变化.首先进行线性的变换,公式如下:
6 结语
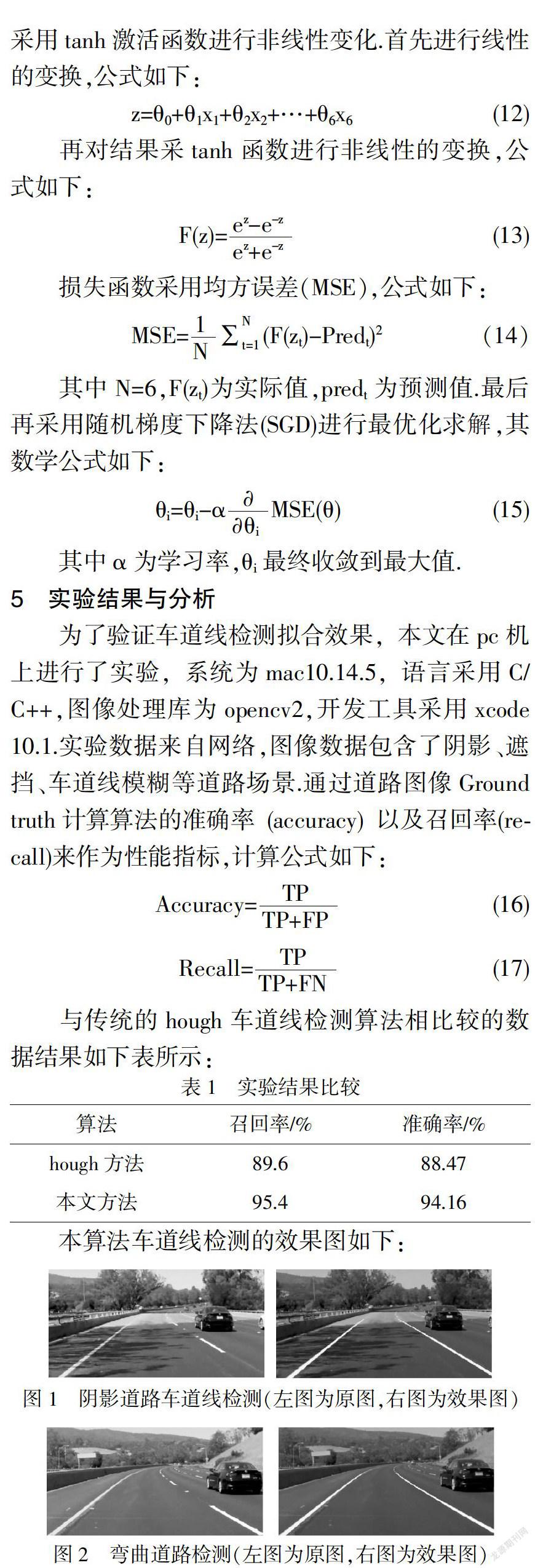
本文所提出的基于均值漂移的道路车道线检测算法,经过实验得知,具有以下优点:(1)可以对不同的道路曲线进行拟合,无论是曲线还是直线都可以达到很高的准确性.(2)对多种道路场景,诸如道路阴影、遮挡、明暗交替、车道线模糊都有很好的检测效果,并且鲁棒好、精确度高.
参考文献:
〔1〕钱基德,陈斌,钱基业,陈刚.基于感兴趣区域模型的车道线快速检测算法[J].电子科技大学学报,2018,47(03):356-361.
〔2〕MA Chao, XIE Mei. A method for lane detection based on color clustering[C]//Third International Conference on Knowledge Discovery and Data Mining. Phutet: IEEE Computer Society, 2010: 200-203.
〔3〕李向阳.基于单目视觉的机动车道路检测和跟踪研究[D].上海交通大学,2015.
〔4〕Li, X., Fang, X., Wang, C., & Zhang, W. (2014). Lane Detection and Tracking Using a Parallel-snake Approach. Journal of Intelligent & Robotic Systems, 77(3-4), 597–609.
〔5〕Neven, D., Brabandere, B. D., Georgoulis, S., Proesmans, M., & Gool, L. V. (2018). Towards End-to-End Lane Detection: an Instance Segmentation Approach. 2018 IEEE Intelligent Vehicles Symposium (IV).
〔6〕Gurghian, A., Koduri, T., Bailur, S. V., Carey, K. J., & Murali, V. N. (2016). DeepLanes: End-To-End Lane Position Estimation Using Deep Neural Networks. 2016 IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW).
〔7〕Huang, Y., Chen, S., Chen, Y., Jian, Z., & Zheng, N. (2018). Spatial-Temproal Based Lane Detection Using Deep Learning. Artificial Intelligence Applications and Innovations, 143–154.
〔8〕Comaniciu, D., & Meer, P. (2002). Mean shift: a robust approach toward feature space analysis. IEEE Transactions on Pattern Analysis and Machine Intelligence, 24(5), 603–619.
〔9〕胡秀敏,何志琴.無人驾驶汽车中的车道线检测研究[J].新型工业化,2018,8(12):57-60.
〔10〕黄思育,柳培忠.一种自适应的车道线检测算法[J].东莞理工学院学报,2019,26(01):45-49.
〔11〕张家搏.基于图像的规则化道路检测与跟踪算法研究[D].哈尔滨工业大学,2017.
