水下机器人在福建水电工程水下建筑物质量检测中的应用
2019-09-10徐刚
徐刚
摘要:为了全面了解并掌握水工结构物在水下运行状态,通过水下机器人(ROV)进行水下建筑物质量检测。ROV可以高效、安全、全面地完成水工结构物水下检查作业任务,具有灵活、高效、直观和可靠等技术特点。介绍了ROV应用于福建省湄洲岛管道、东方红输水涵洞以及西溪水库大坝等工程水下建筑物质量检查实例。实践证明,ROV可取得详细可靠的检查结果,提供有效的水工构造物现状信息。ROV可对水工结构物如混凝土结构,金属结构等水下情况进行的有效观察和实时分析,可为水工建筑物质量的安全鉴定和除险加固提供有益参考。
关键词:水下机器人;水下建筑物;质量检查;水利水电工程;福建省
中图法分类号:TV698.2文献标志码:ADOI:10.15974/j.cnki.slsdkb.2019.11.012
福建省水利水电资源蕴藏丰富,近年来,随着大规模水利水电基础设施建设的不断完善,目前省内水库已逾3 600座,总库容超过200亿m3,水电站逾6 600座,装机容量超过12 000 MW,规模以上水闸超过2 380座,已建堤防长度也超3 500 km[1]。这些水利水电工程可有效减少自然洪涝灾害的影响,大力保障城乡居民生活和农业生产,促进国民经济可持续发展。
随着水利水电工程运行时间的增加,水库及水电站的安全鉴定需求越来越大。近年来,越来越多年久失修的水电工程开始进入除险加固阶段,即使是新建水电工程,在日常运行管理中也常遇到各种水下病险隐患,如水下结构的损坏、缺失、裂缝、老化,冲刷冲坑,金属腐蚀等。如何检测水下结构和设施的运行状况是水电工程安全鉴定、水库除险加固、水利水电工程日常管理维护中面临的重要课题。
传统水下检查作业由潜水员下水检查完成,该法效率低、危险系数高且局限性大。目前,国内外水下建筑物检查方法以采取水下机器人检查为主、潜水员检查为辅的策略,该法效率较高且安全可靠。21世纪初,水下机器人在我国水利水电工程中逐渐得到应用,如望虞河望亭水利枢纽工作闸门水下检查[1]、阿海水电站1号机进水口检修闸门门槽水下探测[2]、三峡水利枢纽导流底孔封堵检修门水下清理[3]、三渡溪水库水下检查[4]等。这些工程应用案例均表明水下机器人检查技术具有明显优势。
1 水下机器人(ROV)概述
ROV组成结构主要包括控制主机、脐带连接线缆、水下潜器、辅助成像声纳以及其他附件(如机械手)。基本工作原理如下:①通过主机控制台手柄,控制水下潜器在空间360°无死角运动定位至目标区域;②待到达目标区域后,水下潜器中高清摄像头经过控制台适当操作,如角度控制、焦距调整、辅助光源光强调整等,将实时水下视频与声纳成像传输至主机,并显示在屏上,同时上传图像信息至笔记本电脑;③分析视频头像、声纳头像信息水下检查结果以及有用影像资料。
2 ROV技术特点
按照与母船之间有无脐带缆连接的原则,将水下机器人分为两种:①有缆水下机器人即ROV,遥控式水下机器人通过脐带线缆从水面单元获得充足动力和稳定的数据传输,作业时间不受限制,可搭载多种设备仪器;②无缆水下机器人即AUV,依靠自身携带动力源航行,自主性和灵活性更高,但水下可有效作业时间短、活动范围有限、通讯和智能化要求更高。本文介绍的ROV具有以下技术特点。
(1)作业灵活性。ROV在水下能够自由快速前行或后退、上浮或下潜,同时按照指令,通过自身定位系统在水中任意位置固定方向进行悬停作业。而且,水下机器人下潜深度可达数百米,可根据实际工作需要配置脐带长度,基本能满足国内所有坝区深度的水下检查作业,这是潜水员无法替代的。
(2)工作高效性。ROV能够长时间进行水下作业,按照指令快速到达指定地点开展工作,大大缩短了工作时间,并提高了工作效率。而潜水员在水下作业检查会受到工作时间、条件、环境等限制。
(3)结果直观性。ROV通过搭载的水下高清摄像头、二维多波束声纳等设备,可全方位实时观测水下建筑物检测实况。同时,图像信息能同步存储在控制平台的电脑中,以便后期整理分析研究。
(4)数据可靠性。在清澈的水下环境中,ROV能清晰地显示实时图像,如闸门门槽锈蚀,水下构造物混凝土破坏,大坝迎水面裂缝、破损、钢筋锈蚀等缺陷。通过定位系统,记录缺陷空间三维位置信息并保存。在水质条件比较差的情况下,仍可通过自身携带二维多波束声纳,对检测目标进行定位及辨识。
虽然ROV具备以上优势,但应用实践表明[1],使用过程中仍存在一定局限性:①无法有效应用于水流流速快或存在漩涡、大量垃圾杂物等的复杂水体中;②当水质浑浊时,水下高清摄像头将失去其有效性,仅能通过声纳图像来进行粗略判断,不利于详细检测目标区域,尤其是细部缺陷,如混凝土裂缝、破损、钢筋锈蚀等;③ROV是有缆遥控,由于水下环境和工程结构复杂,脐带线缆在跟随水下机器人进入水下的过程中,可能会因操作不当,发生脐带线缆缠绕、挂伤等情况;④若水下存在渔网或较细的线缆时,可能会缠绕螺旋桨,从而造成ROV运行故障。
3 ROV工程应用实例
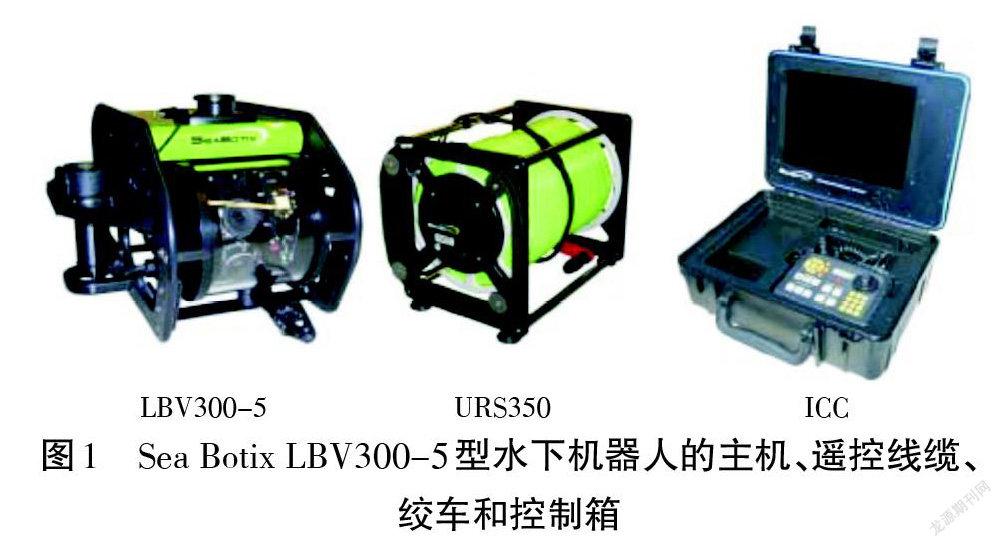
2013年,ROV就已应用于福建省水利水电工程中,利用从国外引进的Sea Botix LBV300-5型ROV(见图1),对福建省仙游金钟水库大坝上游面板、莆田东圳水库进水口、晋江安平桥闸上下游以及仙游抽水蓄能上水库面板渗漏情况进行水下检查作业,水下观测检查结果良好,可提供有效的水工构造物现状信息[5]。下面简要介绍Sea Botix LBV300-5型ROV近期在几项水利水电工程中的应用实例。
3.1 湄洲岛农村饮水安全跨海管道工程水下检查
3.1.1 工程简介
湄洲岛淡水资源贫乏,主要依靠外水供给,随着人口增长、游客增多,再加上原跨海管道屡受破坏,导致岛上经常供水不足。为此,设计了湄洲岛农村饮水安全工程实施方案。该方案由忠门半岛供水管路、跨海供水管路及湄洲岛供水管路3个部分组成。在湄洲大道接入原供水管道,汇入原水厂万吨蓄水池,供水规模为近期1.2万m3/d,远期2.0万m3/d。项目建成后,新建跨海供水管道为湄洲岛主要供水管道,原湄洲岛跨海供水管道为备用供水管道,以提高湄洲岛的供水保证。忠门半岛及跨海部分输水管道采用单根DN500mm钢丝网骨架塑料复合管,湄洲岛陆地部分采用单根DN500mm聚乙烯(PE)管,管線总长5 959.10 m。湄洲湾跨海管道总长3 707.20 m,管道铺设中心高程-16.84~9.17 m,最大水深20.0 m。
3.1.2 水下检查结果
2014年,利用多功能ROV对湄洲岛农村饮水安全工程跨海管道的沟槽开挖深度、沟槽形状、沟槽岩石风化程度、铺砂覆盖、石笼压顶等情况进行了水下检查。结果表明: ①沟槽岩石风化程度,岩礁段的沟槽岩石以花岗岩为主,颜色为典型的白色黑点为主,部分黄色,风化程度以强风化为主,部分中风化;②通过多处桩号沟槽深度定位分析测量,平均沟槽深度均可满足设计要求;③通过连续水下摄像和声纳扫描结果可知,沟槽开挖较平直、边界分明,个别处海砂略有淤积痕迹;④已埋设管道铺砂覆盖表面较平整,砂已覆盖到管高度的50%;⑤石笼网格较完整,搭接良好,石笼内可见石块基本充满,石笼网格无明显变形或破损。
3.2 莆田市东方红水库输水涵洞工程水下检查
3.2.1 工程简介
莆田市东方红水库是以灌溉为主,结合发电、防洪、供水等综合利用的重要中型水库。该工程由主坝、副坝、溢洪道、放水系统及坝后电站等组成。主坝为黏土心墙土石混合坝,最大坝高47.4 m,坝顶长431 m,坝顶宽6.3 m,砌石防浪墙1道,高0.8 m;副坝位于左岸,系多种土质坝,最大坝高22.9 m,坝顶长182.5 m。输水涵洞位于主坝左侧,长161 m,钢筋混凝土圆涵结构直径1.5 m,采用锥阀启闭,设计最大输水流量为23.6 m3/s,进口矗立一座圆形钢筋混凝土放水塔,高40 m,其中塔座高3 m,塔身高37 m。塔身17 m外露于主坝迎水坡,其余23 m埋入坝内。
3.2.2 水下检查结果
2015年,利用多功能ROV对莆田市东方红水库输水涵洞进行水下检查。检查主要内容为进水口拦污栅、检修闸门、闸门槽、闸门拉杆、进水塔内部混凝土水下部分、输水涵洞洞身(包括进口渐变段、闸门槽前段、闸门槽段、下平段、转弯段、上升段、钢衬段、分叉口)等部位。检查结果如下。
(1)进水塔塔身内部混凝土基本完整,局部存在疏松,麻面露石,缺损形成凹槽,休息平台底部混凝土因钢筋锈胀引起脱落,爬梯钢筋普遍锈蚀严重,在高程55 m附近发现断裂性裂缝,该裂缝基本已贯通整层,影响进水塔的塔身结构安全。
(2)闸门启闭拉杆及拉杆接头普遍锈蚀严重,表面锈包密集,表面锈蚀形成类似松树皮形状,有的部位锈坑明显,拉杆接头处锈蚀严重。
(3)闸门门体面板、肋板普遍锈蚀严重,形成厚大的锈包,闸门门体与拉杆连接部位锈蚀明显。
(4)闸门槽基本完整,无明显裂缝、破损等情况,闸门槽附近混凝土结构较完整,但表面凹凸不平,闸门槽与闸门间缝隙较大,且有异物卡在顶部,影响启闭。
(5)洞身底板、侧墙、顶拱混凝土或砌石体基本完整,未见明显破损、坍陷、开裂等缺陷,但闸前段洞身侧墙或底部局部存在横向和纵向裂缝,顶拱局部存在疏松和横向裂缝,个别分缝处见不均匀沉降引起的错位,未见明显渗漏部位。
(6)拦污栅结构总体完整,但框架梁、栅叶普遍锈蚀严重,存在明显锈包,栅叶上附着较多垃圾。
(7)钢管衬砌段与混凝土衬砌段基本完整,止水结构尚完整,止水固定环与固定螺栓普遍锈蚀,其中钢管与混凝土间略有缝隙,止水固定环存在断裂,止水固定螺栓锈蚀明显,止水固定环与钢管间缝隙略大,钢管存在一定程度的锈蚀。
(8)岔管的结构完整性尚好,锥阀锈蚀较明显。
(9)输水涵洞洞身总体基本完整,但闸前段洞身侧墙或底部局部存在横向裂缝和纵向裂缝,顶拱局部存在疏松和横向裂缝,个别分缝处见不均匀沉降引起的错位;进水塔塔身混凝土结构存在断裂,金属结构普遍锈蚀严重,闸门与闸门槽间有异物卡阻,影响工程安全运行。
3.3 霞浦县溪西水库大坝工程水下部位检查
3.3.1 工程简介
溪西水库工程1974年10月竣工并投入使用。1985~1986年,对土坝段迎水坡挡土墙进行加厚处理。1997年,发现主坝的土坝段下游挡土墙上、下排水严重堵塞,造成下游坡浸润线明显升高,土坝体、坝基以及库周渗漏严重,土坝上游坡局部塌陷,近坝库岸局部塌方等。溪西水库枢纽工程由主坝、两座副坝、溢洪道、坝下左右输水洞及坝后电站等组成。其中,主坝为浆砌石重力坝和均质土坝相结合的坝型,最大坝高34 m,坝长169.4 m;两座副坝共计长211 m,溢洪道安装3扇10 m×5 m的钢质弧形闸门。水库死水位420.8 m,相应库容100万m3,正常高水位441.60 m,相应库容3 514万m3,总库容3 980万m3,调洪库容480万m3。于2006年11月19日对溪西水库大坝进行除险加固建设。
3.3.2 水下机器人视频检查结果
2016年,利用LBV300-5多功能水下机器人对霞浦县溪西水库进行水下检查,具体包括大坝右岸土坝与中间溢洪坝段接头部位的砌石挡土墙、右岸土坝上游面砌石护坡、右岸土坝挡土墙与砌石护坡结合部位等结构,为评价水下部位的安全状态提供了直观的影像资料。检查结果如下。
(1)靠近溢洪坝段的挡土墙侧面及压顶条石砌筑基本完整、砌筑有序,多数勾缝砂浆较完整,但十几处勾缝砂浆出现小范围(20~30 cm)破损、脱落,勾缝砂浆与条石/块石间有3~4处存在长30~50 cm的短缝隙;自水深12 m以下挡土墙侧面覆盖较多的泥垢,水体较浑浊。
(2)右岸土坝上游面砌石护坡为干砌块石/毛块石,总体基本完整,未见明显的坍塌、开裂现象,但局部毛块石砌筑不够整齐,毛块石间的间隙较大;自水深5 m以下的块石表面覆盖较多泥垢,水体渐浑浊;在上游面砌石护坡水下部位的表面,未见鲜艳黄色泥土痕迹。
(3)右岸土坝挡土墙与砌石护坡结合部位表面为砂浆勾缝砌块石,总体上砌石表面基本完整,大部分坡面勾缝砂浆尚完整,局部破损缺失;水上高程438.5~440.5 m见上下游方向的略斜向的表面裂缝,块石间略有张开、错位现象,局部略有沉陷;水下高程436.5 m附近勾缝砂浆缺失明显,块石间略有张开、错位、挤压、边角破裂现象,破碎部位范围约25 cm×40 cm,块石错位约2~3 cm;在右岸土坝挡土墙与砌石护坡结合部位表面,也未见鲜艳黄色泥土痕迹。
水下声纳检查结果表明:霞浦县溪西水库大坝右岸土坝砌石挡土墙及其与土坝结合部位上游面、土坝上游砌石护坡等外形轮廓基本完整,未发现大面积的变形、塌陷、开裂、破损等现象。
4 ROV应用前景展望
水下机器人可对水工结构物如混凝土结构,金属结构等水下情况进行有效观察并实时分析,为后期安全鉴定和除险加固提供直接资料,具有作业灵活、检查高效、结果直观和数据可靠等明显的技术优势,但在操作过程中,水下机器人仍存在复杂水环境中自身稳定性和安全性不足的缺点。水下机器人的局限性,一定程度上限制了其在水利水电工程中水下复杂环境的推广应用。后续研究需要重点强调如何实现水下机器人强稳定性大范围高清晰度视野和无脐带线缆高智能化水下检查活动,使得水下机器人能够更加高效更加系统性开展水下检查工作,从而对水库大坝安全鉴定和水下除险加固,保障水库大坝的安全,具有更重要的工程指导现实意义。
参考文献:
[1] 钟惠钰,尤林贤. 小型遥控水下机器人在水利工程中的应用[J]. 水利建设与管理,2008(12):35-36.
[2] 李福年, 陈慕雄, 田维坤. ROV原理及在阿海水电站工程中的应用[J]. 云南水力发电,2013(3):119-121.
[3] 单宇翥,陈洋. 水下机器人在三峡水利枢纽导流底孔封堵检修门水下清理工程中的应用[J]. 大坝与安全,2015(3):51-53.
[4] 李钟群. 水下机器人在浙江省水库大坝检测中的初步应用[J]. 浙江水利科技,2010(3):57-59.
[5] 鄭发顺. 遥控水下机器人在我省水利水电工程中水下检测的应用[J]. 水利科技,2014(1):40-42.
(编辑:唐湘茜)