基于陀螺仪的无人机保护装置
2019-09-10王志港郝传柱
王志港 郝传柱
摘 要:结合无人机保护装置设计需求,本文针对多旋翼无人机完成了基于陀螺仪的无人机保护装置设计,并从装置总体设计思路、结构组成设计、整体性能和应用优势四个方面展开了详细分析,指出装置能够利用万向支架、球形外壳实现陀螺仪功能模拟,在无人机中心轴上安装内、外环架形成由两个平衡环构成的保护球,通过360°旋转为内置无人机提供全方位保护。
关键词:陀螺仪;无人机;保护装置
中图分类号:V279;V241.5 文献标识码:A 文章编号:2096-4706(2019)16-0170-02
Abstract:Combined with the design requirements of UAV protection devices,this paper completed the design of gyroscope-based UAV protection device for multi-rotor UAV,and the detailed analysis was carried out from the overall design ideas,structural composition design,overall performance and application advantages of the device,indicating that the device can realize the gyroscope function simulation by using the gimbal and the spherical shell. The inner and outer ring frames are installed on the central axis of the drone to form a protective ball composed of two balance rings,all-round protection for built-in UAV is provided by 360 degree rotation.
Keywords:gyroscope;UAV;protection device
0 引 言
作为集航电、控制等技术为一体的高性能设备,无人机在侦查、军事等领域得到了广泛应用。所以,不仅要保证无人机能顺利完成各种复杂任务,还要保证其能够稳定飞行,在危险环境中避免无人机因碰撞发生损坏。而目前在无人机保护方面,在无人机保护装置设计中实现陀螺仪结构模拟能够确保无人机真正实现自主稳定飞行。因此,还应加强基于陀螺仪的无人机保护装置设计,以便为无人机提供全方位保护。
1 无人机保护装置设计需求
多旋翼无人飞行器拥有简单的机械结构,并且成本相对较低,然而由于飞行期间难以实现稳定控制,容易出现侧翻坠机问题,需要配备自动控制器和导航系统,加强飞行姿态控制。而导航系统多重达数十斤,并且体积较大,在小型飞行器上并不适用。直至MEMS技术取得了发展,导航系统才实现了轻量化,促使多旋翼无人机得了广泛的应用。但就目前来看,未来多旋翼无人机将与更多无人机一同在复杂环境下执行任务,通过使用无线电技术完成GPS定位、遥控和图像传输等操作,在这一过程中容易发生信号干扰,导致无人机因无法获得精确坐标位置数据而失控,不仅会引发作业失败,还可能发生炸机,继而带来较大损失[1]。因此,要完成无人机保护装置设计,加强对无人机的全方位保护。
2 基于陀螺仪的无人机保护装置设计分析
2.1 总体设计思路
在无人机航电系统中,陀螺仪为重要组成部分,其能否充分发挥作用关系到无人机能否安全完成任务。在设计无人机保护装置时,可以对陀螺仪结构功能进行模拟,达到对无人机实现自动控制和保护的目的。
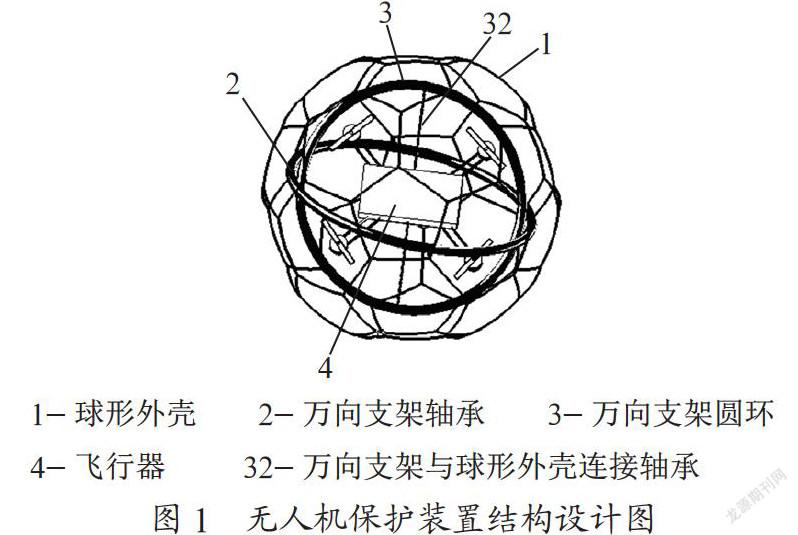
从总体设计来看,基于陀螺仪的无人机保护装置由三个主要部分构成,即飞行器、万向支架架构和球形防护结构外壳。其中,飞行器位于结构最内侧,为四旋翼无人机,利用四个马达提供动力,为飞行器飞行提供方向控制动力。万向支架结构嵌套在球形防护结构内部,包含一个轴承和一个圆环,利用圆环对轴承进行支撑,同时与球形外壳连接。在结构设计时,需要使飞行器重心与支架结构、球形防护外壳重心重合,促使防护结构配合支架结构360°旋转,达到为飞行器提供全方位缓冲保护的目的。保护装置结构设计图,如图1所示。
2.2 结构组成设计
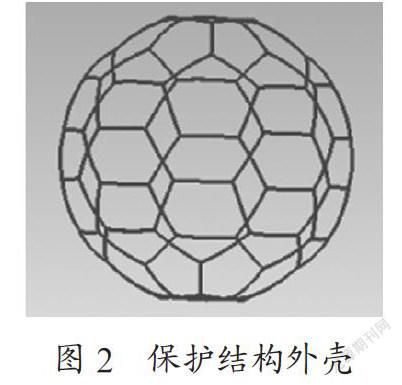
从结构特点上来看,保护外壳与三轴陀螺仪类似,通过在无人机中心轴上进行内环架的安装,然后在内环架外进行外环架的安装,能够形成由两个平衡环构成的保护球,在飞行器运行的过程中环绕飞行器三轴进行自由运动[2]。在外环架上进行球形外殼的加套,能够形成完整保护球。利用球形保护结构外壳,如图2所示,能够为无人机和传感器提供可靠、稳定的保护。从整体来看,保护装置整体类似于地球经纬网结构,内部两个圆环相当于相互垂直的两个转轴,能够使外壳保持灵活运动,达到360°自由旋转的目标,继而为内部结构提供全方位保护。而球形外壳为镂空状壳体,通过在任意三边交点完成轴承设置,并在对角位置进行轴承设置,能够利用两个轴承加强外壳与外圆环轴承孔的连接。在外圆环内侧,完成两个短轴承的设置,然后分别与内圆环的两个轴承孔连接。在内圆环内,利用中空碳纤维管与内置的无人机重心连接在一起。因此采用轴承,将嵌套的两个圆环分别与无人机球形外壳结构连接在一起,能够构成一个整体,保证两圆环和保护球重心与无人机重心重合。采用镂空结构,目的在于避免无人机保护外壳给内部摄像头视野带来遮挡。在实际制作过程中,还要选用玻璃纤维杆等材料进行外壳结构制作,以便使外壳强度得到保证的同时,降低制作成本,使保护装置设计更具实用性。在连接杆设计上,同样需要采用轻量化和强度大的材料,以便使结构具有足够韧性,避免在发生碰撞后损坏,这样才能使结构保持稳定性能,为无人机提供全方位保护。
2.3 装置性能分析
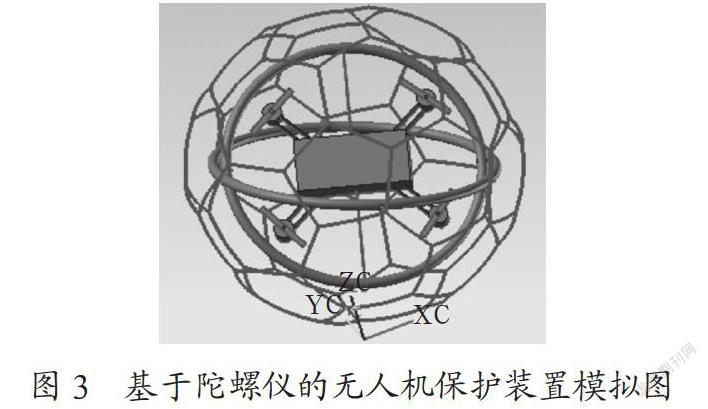
从整体性能上来看,飞行器将达到1.5km遥测距离,稳定性达到优秀水平,载重量为0.5kg,续航时间能够达到15min,飞行高度为500m,飞行速度为35km/h。在整套装置中,飞行器为已经调试好具备自稳功能的四旋翼无人机,能够实现动力输出,相当于陀螺仪的转子。无人机机身本身体积较小,具有轻量化和高强度的特点,能够满足装置设计要求。利用飞行器配备的环境探测传感器,能够对周围环境信息进行收集。如图3所示,为模拟得到的基于陀螺仪的无人机保护装置。实际四旋翼无人机需要利用四个电机转速进行无人机姿态控制,采用探测器进行无人机飞行姿态角度采集,然后当成是控制反馈,可以结合姿态数据和飞行环境信息完成飞行模式自主选择,实现无人机的自主控制[3]。借助保护球,无人机可以沿着障碍物作业,在狭小空间内穿行,完成空间拍摄,并将信息实时传回至地面,因此能够避免因螺旋桨碰撞障碍物导致无人机失去动力并坠落。在多地形探索中,在保护性碳纤维笼中进行旋转摄像机支架和高清摄像机的安装,能够实施远程监控。将结构精密装置都设置在保护球中,即便无人机发生碰撞反弹,整个装置沿着不平地面滚动,依然能够保证内部设备稳定性,不会给设备带来损伤,所以可以使无人机野外探索能力得到进一步提高。
2.4 装置应用优势
结合上述设计可知,采用基于陀螺仪的无人机保护装置,能够使无人机的探索能力得到明显提高,从而为无人机执行各种复杂任务提供便利,降低无人机事故发生率,减少无人机作业带来的人力、物力等损失。从装置应用优势上来看,设计出的无人机可以在复杂、狭小的空间环境中安全飞行,在面对危险时通过近距离操纵无人机能够顺利应对多样性挑战,比如在山洞、雪窟等危险环境探测工作中,就可以采用带有保护装置的无人机进行信息探测与数据采样。在铁路、道路等施工作业监控探测与营救任务开展等方面,由于飞行器拥有较强飞行能力,因此可以得到应用。从材料价格上来看,为无人机配备的球形外壳采用玻璃纤维杆和3D打印连接件制成,具有价格低廉的特点,能够为装置安装和拆卸提供便利,使无人机具有方便携带的作业优势,使无人机的转子在球形碳纤维笼中悬浮并且不会给近距离操纵的人员带来伤害。因此从总体来看,设计出的基于陀螺仪的无人机保护装置具备廉价、快捷和安全的优势。
3 结 论
综上所述,在无人机飞行空间日渐复杂的背景下,还要加强保护装置设计,以便使无人机能够安全完成飞行任务,避免带来过多人力、物力损失。设计基于陀螺仪的无人机保护装置,可以通过内置无人机和外连万向支架实现球形镂空外壳的嵌套,形成的保护球能够围绕无人机进行360°旋转,为内部结构提供全方位保护,促使无人机野外探索能力得到提高,能够在各种狭小空间中得到适用。因此设计该保护装置,未来在无人机探测领域将获得较好应用前景。
参考文献:
[1] 戴文瑞,王建华.無人机垂直陀螺仪及其链路健康状态评估研究 [J].重庆理工大学学报(自然科学),2017,31(9):138-144.
[2] 马正华,陈杰,陈岚萍,等.四旋翼无人机陀螺仪实现姿态稳定性控制 [J].计算机仿真,2016,33(10):32-38.
[3] 黄超,殷万君,徐斌,等.nin无人机保护伞电路控制系统 [J].电子世界,2016(15):86+88.
作者简介:王志港(1997.06-),男,汉族,山东泰安人,本科,研究方向:自动化;郝传柱(1983.04-),男,汉族,山东聊城人,讲师,工程师,本科,研究方向:自动化、控制工程。
