基于无人机海上协同搜救关键技术研究
2019-09-10朱武斌周立张一李进军祁晶
朱武斌 周立 张一 李进军 祁晶
摘 要:无人机作为一种新型的海上协同搜救设备,具有搜救成本低,效率高、操纵灵活等优势,本文首先对无人机协同搜救进行了系统阐述,对涉及的关键技术进行了研究和探讨,其中包括目标智能识别与定位、机载无线通信技术及海图坐标转换等,结合机载AIS和北斗通信系统可以实现远海目标和恶劣气候下的搜索,增加北斗救助反馈链路,突破船舶搜索低视角、低通信的局限性,为增强海上协同搜救能力提供了技术保障。
关键词:无人机;海上协同搜救;识别与定位;无线通信;坐标转换
中图分类号:V279+.3 文献标识码:A 文章编号:2096-4706(2019)13-0001-03
Research on Key Technologies of Marine Collaborative Search and
Rescue Based on UAV
ZHU Wubin,ZHOU Li,ZHANG Yi,LI Jinjun,QI Jing
(Jiangsu Ocean University,Lianyungang 222005,China)
Abstract:As a new type of marine collaborative search and rescue equipment,UAV have the advantages of low cost,high efficiency,and flexible operation. This paper first systematically expounds UAV coordinated search and rescue,and studies and discusses the key technologies involved. These include the intelligent identification and positioning of targets,airborne wireless communication technology,and chart coordinate conversion. Combined with airborne AIS and Beidou communication systems,we can achieve long-range sea targets and search under harsh weather conditions,and increase the Beidou rescue feedback chain. To break through the limitation of low angle of ship search and low communication,it provides technical guarantee for enhancing the capability of marine search and rescue.
Keywords:UAV;coordinated search and rescue;identification and positioning;wireless communications;coordinate conversion
0 引 言
随着国家的发展,海洋开发和航运量的不断增大,海上活动呈现高密度、多元化趋势,海洋捕捞、石油开发、近岸工程建设以及船舶大型化交织在一起,海上交通安全形势面临着严峻的挑战,海难事故及成本不断增加,在有限海域空间下海船舶的高密度和大型化导致船舶领域减少,碰撞危险系数增大。目前主要救助对象还是以船舶事故为主,由于海上气候条件及水深的制约,搜救耗时长、搜寻效率低,因此在通信技术、计算机技术及AI技术快速发展的今天,无人机快速、高效、便捷的搜索、定位和救助能力成为船艇协同搜救的有效手段。
无人机是一种自动化作业工具,因其速度快、视野广,能够纵深到海里,迅速地可操作性被广泛应用。海洋应用领域从用途方面可以分为军用和民用两个大类,军用包括:军事打击、敌情监测、通信中继等等,杨小川在基于油电混合动力的中小型无人机及其作战应用展望中对油电无人机在军事中的作用和未来作战优势进行了介绍;朱涛、李淋杰等在无人机在叙利亚战争中的作战运用与启示一文中阐述了无人机的军事用途以及其在叙利亚战争中的使用特点。民用方面可以分为:海洋监管、海洋测绘、气候探测、海上搜救、等领域。如海事方面段贵军介绍了无人机在海事领域的应用范围和海事监管中面临的问题及解决方案;海上测绘方面徐福祥利用无人机对黄海绿潮进行监测研究,弥补了卫星遥感在时空上的分辨率不足的问题,建立了无人机绿潮监测颜色指数,并对MODIS监测误差进行了定量分析;张凯、张好运等人利用无人机航空摄影测量技术对海岛进行三維重建,介绍了测量中无人机自动控制和三维重建两项关键技术,并在威海海域进行了实地应用;气候探测方面姜明、史静等人利用无人机搭载微型气息设备对低空温湿度进行探测,并且和传统监测设备进行了比对,事实证明具有很好的一致性,但精度有待提高;海上搜救方面曹德胜、桑凌志等在文中对无人机的定位、信号传输和续航问题进行了研究,并且设计了无人机水上交通安全应急处置系统,但对电子海图相关信息未做进一步阐述;赵德灿介绍了无人机在海上搜救中的优势以及救助中具有定位、视频传输和投放救生设备三方面的应用。当然无人机的应用不仅仅局限以上几种,随着技术的成熟,传感器的微型化,无人机的应用范围越来越广。
综上所述,无人机的应用方面已得到高度认可,目前无人机搜救在陆地应用相对较多,陆地目标定位跟识别较海上容易且具有信号传输稳定等优势,虽然海上救助在澳大利亚有无人机成功救助落水人员的案例,但海上搜救研究主要集中在目标智能识别、无人机微型传感器的搭载、机载通信信号的稳定传输等关键技术层面上,本文除了对上述技术进行研究总结外,还对无人机协同搜救中地理坐标与墨卡托海图坐标转换进行了研究。
1 无人机协同搜救总体设计
无人机作为海上协同搜救设备之一,具有机动速度快,搜索方位全面,搜寻效率高等优势,弥补了船舶搜救视角低、水域小以及搜救直升机人力物力损耗大等缺点,作为海上协同搜救无人机宜选用地面效应无人机或者多旋翼无人机,具有强抗风、高承载能力,搭载传感器和救生设备,增强搜救能力,海上无人机协同搜救除了常规的船-岸、船-船通信外,无人机集成五大功能模块:微波通信、机载摄像系统、甚高频中继、导航以及自巡航模块,提高搜索和救助的效率,并且利用机载AIS设备可以实现能见度不良情况下的搜索,同时结合北斗通信模块,不仅可以提高通信的稳定性,还可以利用北斗通信实现远海搜救水域船舶AIS信息的转发,及时了解搜救目标周围船舶动态,利用北斗救助反馈链路,通过机载音频VHF或者AIS实现救助反馈信息的传达,提高被救助者的生存信念。
2 无人机协同搜救关键技术研究
2.1 无人机目标智能识别
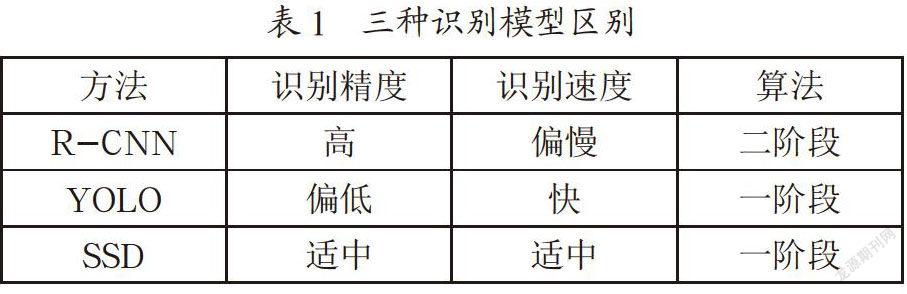
海上物标识别类别包罗万象,从搜救角度分析主要包括:事故船舶、落水人员以及搜救用的相关救生设备的识别。海上物标识别相比陆地环境复杂多变,受海况和气象影响较大,搜救的关键是目标识别算法的准确性和实时性,选择合适的识别方法利于目标的搜索效率,其中包括算法的鲁棒性和时效性,随着人工智能技术的发展,基于卷积云神经网络的目标识别发展迅猛,目前有R-CNN、YOLO以及SSD系列等识别方法,三者在识别领域有着不同的区别如表1所示。
以上三种方法在实际运行时往往难以满足实时性,需要通过加速运算的方法来提高整体系统运算速度,目前主要有GPU加速和模型压缩(Mobile Nets)两种。在SSD模型实测中可以发现运行速度相比CPU之比为CPU:GPU:GPU+Mobile Nets=1:3:6。无人机救助时面对海洋复杂多变,海洋参数以及救助对象的非固定性,传统的识别方法无法满足复杂海洋大数据的处理,机器学习作为目标识别的主要方法,利用深度学习和强化学习实现目标的快速检索识别,在深度学习中卷积神经网络(CNN)在处理图像信息方面比其他方法拥有更好的结果,而受限波尔兹曼机(RBM)则在语音方面具有较好优势。夜间目标识别可搭载光电吊舱冷红外传感器目标进行探测,采集的红外数据经过船基或者岸基处理,实现夜间搜救识别和人员生命状况探测。
2.2 无人机目标定位
在无人机目标定位中大部分使用的是预先对固定区域进行信息采集,再基于特征匹配、坐标解算以及生成底图来实现无人机目标定位,海洋领域是个动态过程,目标特征以及位置实时变动,并且海洋地理位置与海图位置需要经过坐标转换才能显示,可以利用微型机载RTK实现无人机自定位功能,然后结合视觉传感器和无人机航测高程获取目标信息,无人机在协助救援过程中由于受风和操纵的影响,根据已知参数的定位模型定位或者已知无人机摄像头姿态及位置参数等定位时计算过程复杂且精度低,利用基于射影几何定理的视觉定位算法可以简单、快速、较高精度解决目标定位问题。再通过坐标转换实现海图显示。
其基本思路是利用成像平面的已知坐标点和目标成像点,通过射影交比不变性解算海上目标坐标点。
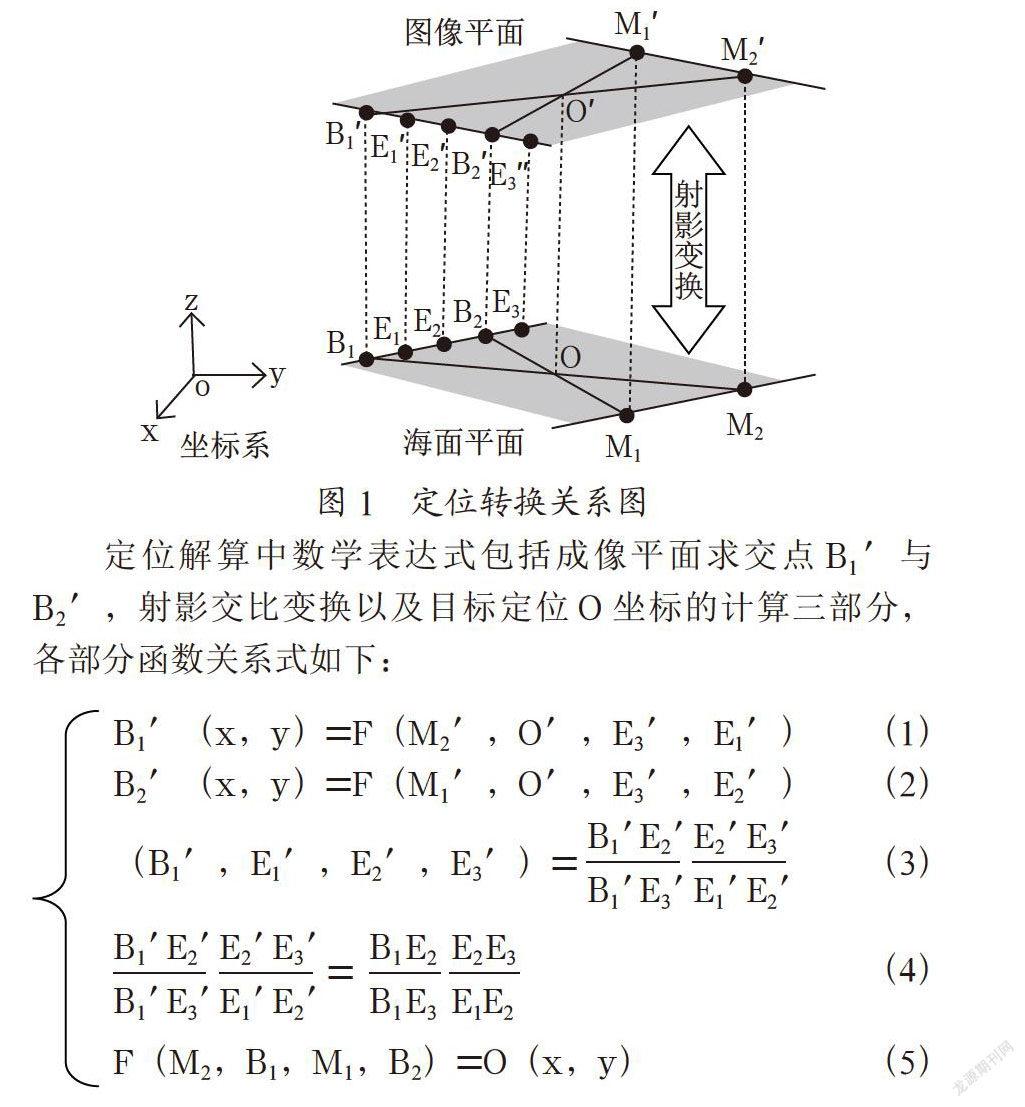
目标定位过程中需要选取两个计算平面——目标海面平面β和摄影成像图像平面β′,在海面上通过卫星等手段获取β平面内两直线De、Dm上已知坐标点,分别是(E1、E2、E3、M1、M2),对应的β′平面内两直线De′、Dm′上已知图像点为(E1′、E2′、E3′、M1′、M2′),通过已知点M1′、M2′与目标成像点O′相交于B2′、B1′,利用交比不变性获得海面對应交点B2、B1,再用β平面点直线相交得到目标点O,如图1所示。
定位解算中数学表达式包括成像平面求交点B1′与B2′,射影交比变换以及目标定位O坐标的计算三部分,各部分函数关系式如下:
联合上面式(1)~式(5)解算出目标点O的坐标。如果无人机定位GPS信号弱或者短暂消失,可以利用此方法反向自定位。未来还可以利用AR技术、视频与海图进行三维重叠,协助搜救定位。
2.3 机载通信研究
通信作为搜救的桥梁,能够传递最新搜救状况和搜救指令,通信的质量会直接影响搜救的效率,无人机机载通信设备包括:机载VHF、AIS、北斗RDSS、高精度RTK等等。通信设备完成无人机、搜救船舶、岸基中心以及卫星等平台的通信,无人机作为海上协同搜救装备,近岸搜救可以利用机载VHF和AIS实现船基、岸基的短程通信,远海搜救利用北斗RDSS和RNSS集成或者高精度RTK模块,实现搜救过程连续定位和通信,当无人机远离搜救船舶,搜索到的目标可以通过北斗卫星连接到地面控制中心,然后再到海面救援中心,救援中心制定救援策略,例如:联系就近船舶救助或者使用反向链路进行信息反馈等。救援船舶搜救范围有限,无人机利用机载VHF、AIS和视频摄影进行海面范围的搜索,扩大船舶AIS的接收范围,利用卫星链路转发机载AIS信息,根据AIS信息收集搜救航线的水深数据,为救援船舶提供实时水深数据,实现救援的高效性。未来无人机将参与海洋组网建设中,提供更多的海洋搜救数据,连接卫星数据、海面智能移动观测平台、深海探测装备以及融合海底智能观测网,实现海洋透明,无人机信息获取多源化、立体化,实现水上、水面及水下全方位搜索。
2.4 海图坐标转换
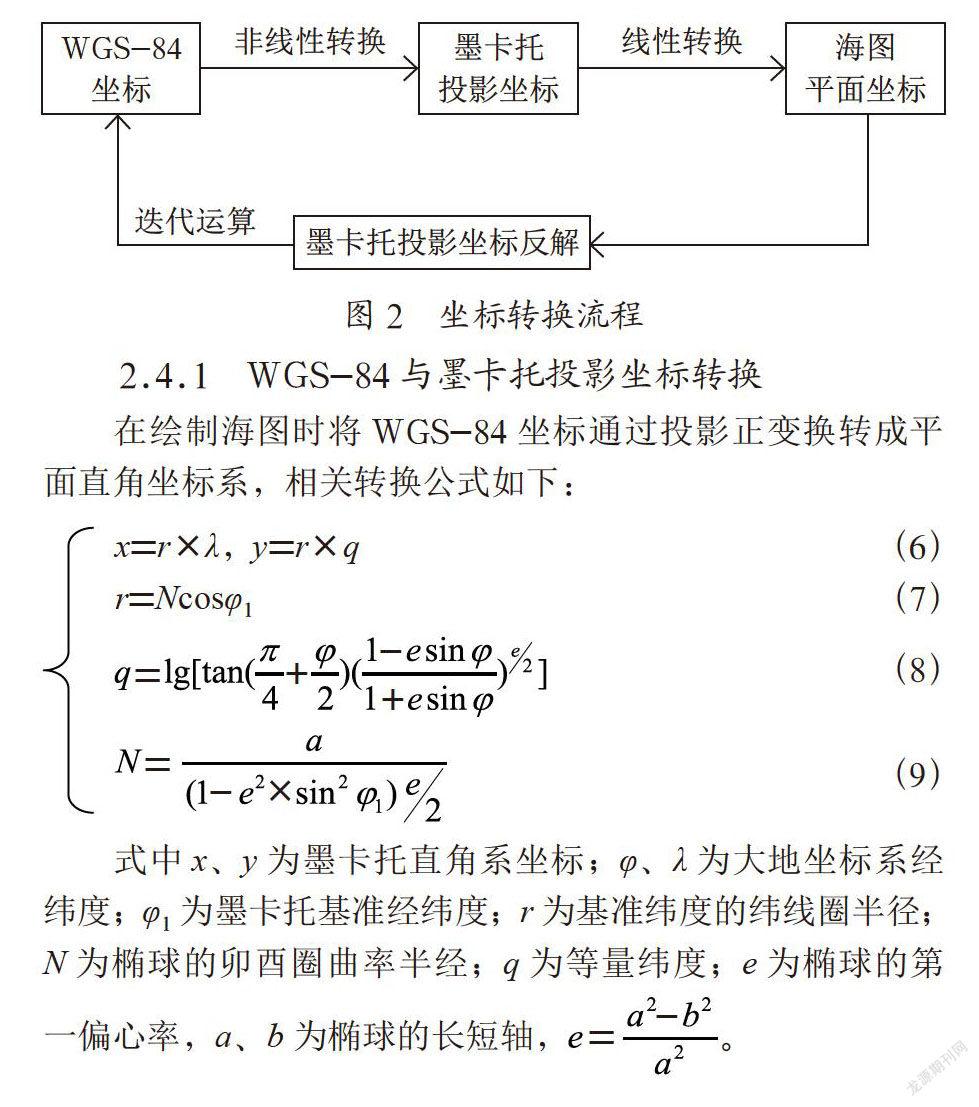
电子海图(ECDIS)作为海上交通助航设备,在搜救指挥、交通管理、海洋测绘等领域发挥着重要作用,通过坐标转换可以实现海上搜救目标在电子海图上的显示,转换流程如图2所示。海上搜救采用的定位坐标是基于WGS-84坐标系统,电子海图应用的是平面坐标——墨卡托投影,由于墨卡托采用的是等角圆柱投影。因此,投影具有等角航线的特性,适合编制航海图。本文还可以将无人机经纬度坐标在电子海图中进行显示,辅助救助和无人机航线规划。
2.4.1 WGS-84与墨卡托投影坐标转换
在绘制海图时将WGS-84坐标通过投影正变换转成平面直角坐标系,相关转换公式如下:
式中x、y为墨卡托直角系坐标;φ、λ为大地坐标系经纬度;φ1为墨卡托基准经纬度;r为基准纬度的纬线圈半径;N为椭球的卯酉圈曲率半经;q为等量纬度;e为椭球的第一偏心率,a、b为椭球的长短轴,。
经式(1)~式(4)联合计算得到(x,y)墨卡托投影坐标绝对值。由于海图坐标原点不是零点,故可以通过简单的坐标平移得到。海图坐标到用户屏幕的显示需要通过坐标系和屏幕像素点坐标转换,计算像素的实际距离进行转换,考虑到参考系不同即可。
无人机在搜救中结合电子海图显示,可以清晰快速实现搜索位置相互显示,并且可以通过已知搜索到的海图显示的AIS目标,经过坐标反解确定海上目标坐标三维信息,在能见度不良的海况下指导无人机救助,达到航线规划的目的。
3 結 论
本文在目标识别中加入机器人学习提高搜索运行速度,目标定位采用鲁棒性和定位速度较快的射影几何定理的视觉定位算法,通信方面则引入北斗反馈链路,增强被困人员信心,最后利用坐标转换实现无人机、搜索目标以及用户的位置交互,解决因气候原因导致的无人机视频搜索效果差的难题,由于海上环境复杂多变,希望无人机装备在未来的发展中通过一系列的创新与测试实现关键技术的不断深入,对于其装置与系统呈现进一步改进,从而使其能更好地开展工作。
参考文献:
[1] 张伟.基于AIS实态观测的受限水域船舶领域模型研究 [D].大连:大连海事大学,2018.
[2] 杨小川,王运涛,黄勇,等.基于油电混合动力的中小型无人机及其作战应用展望[J].飞航导弹,2018(11):41-45+51.
[3] 朱涛,李淋杰,凌海风.无人机在叙利亚战争中的作战运用与启示 [J].飞航导弹,2018(11):31-34.
[4] RedmonJ,Farhadi A. Yolo9000:Better,Faster,Stronger [C]//2017 IEEE Conference on Computer Vision and Pattern Recognition (CVPR),2017:6517-6525.
[5] 徐福祥.基于无人机及多源数据的黄海绿潮监测研究 [D].烟台:中国科学院大学(中国科学院烟台海岸带研究所),2018.
[6] 张凯,张好运,卢旭升,等.无人机海岛礁航空摄影测量技术应用 [J].测绘通报,2018(9):87-90.
[7] 姜明,史静,姚巍,等.多旋翼微型无人机气象探测适用性分析 [J].气象科技,2018,46(3):479-484.
[8] 曹德胜,桑凌志.无人机水上遇险搜救关键技术研究 [J].交通运输研究,2017,3(3):62-68.
[9] 赵德灿.无人机在海上搜救中的应用 [J].中国水运,2018(6):29-30.
[10] 黄卓.无人机运动目标实时检测识别算法研究 [D].哈尔滨:哈尔滨工业大学,2018.
[11] 周立,张阳,张一,等.无人海洋测绘技术体系构建 [J].测绘通报,2019(4):130-133.
作者简介:朱武斌(1987-),男,汉族,湖南邵阳人,毕业于测绘与海洋信息学院海洋空间信息技术专业,硕士研究生,研究方向:物理海洋学;通讯作者:周立(1959-),男,汉族,贵州贵阳人,就职于测绘与海洋信息学院,硕士生导师,教授,研究方向:海洋动力过程信息技术、智慧海洋。
