电动夹轮器的发展与应用解析
2019-09-10叶海青


摘 要:电动夹轮器的出现极大地提高了防风制动装置的工作效率,由于其采用电能作为驱动,使其较传统夹轮器和液压轮边制动器而言更加清洁环保。本文在对电动轮边制动器与液压轮边制动器进行对比分析的基础上,剖析了电动夹轮器的工作原理,并根据电动夹轮器的结构特点解析了其在安装、调试及运行维护等方面所具有的优越性。
关键词:电动轮边制动器;电动夹轮器;制动器结构
中图分类号:TH134 文献标识码:A 文章编号:2096-4706(2019)19-0183-03
Abstract:The emergence of electric gripper greatly improves the working efficiency of wind-proof brake device. Because it uses electric energy as driving force,it is cleaner and more environmentally friendly than traditional gripper and hydraulic wheel-side brake. Based on the comparative analysis of electric wheel brake and hydraulic wheel brake,this paper analyzed the working principle of electric wheel gripper,and analyzed its advantages in installation,debugging and operation maintenance according to its structural characteristics.
Keywords:electric wheel brake;electric wheel clamp;brake structure
0 引 言
制动器是指具有使运动的机械或部件减速、停止或保持停止状态等功能的装置,在设备制造及机械加工行业中得到了十分广泛的应用。随着工业化的迅猛发展和大功率机械的投入使用,传统的夹轮器已经无法满足日渐增长的生产力需求。液压轮边制动器的出现缓解了这一矛盾。作为一种新型的防风、制动装置,液压轮边制动器采用碟形弹簧制动,液压站驱动释放,结构紧凑,维护工作量小,一时间被广泛用于室外大中型起重机及港口装卸机械工作状态下的防风制动和非工作状态下的辅助防风制动[1]。然而,液压夹轮器安装过程复杂,在瓦块退距、瓦块随位、退距均等、閉合时间等调试过程中对精度的要求较高,运行过程中维护要求高,定检项目多,且运行中若液压油泄漏将直接影响制动功能。为了满足高效便捷、绿色环保的新时代需求,电动夹轮器应运而生。
随着电气科技的飞速发展,电动夹轮器逐渐得到了改进和完善[2,3]。电动夹轮器与液压夹轮器一样,能够作用于室外大中型起重机及港口装卸机械工作状态下的防风制动和非工作状态下的辅助防风制动,并且由于其使用的是电力驱动,供能绿色清洁,不存在液体泄漏等环保问题。另外,随着我国电价的逐渐下调,电动夹轮器的使用成本也日渐下降,运行效能不断提高。
1 电动式轮边制动器工作原理
DLZ系列电动轮边制动器(以下简称电动夹轮器)是一种防风制动装置。主要用于室外大中型起重机及港口装卸机械工作状态下的防风制动和非工作状态下的辅助防风制动。电动夹轮器的结构如图1所示,其工作原理如下:电机得电驱动齿轮传动,通过齿轮传递力矩推动丝杠压缩制动碟簧,继而带动制动臂内收,通过铰点的作用带动制动衬垫远离制动盘,消除夹紧力,电磁铁得电维持制动衬垫退距;当电机断电失去驱动力时,电磁铁失电,两个制动臂在制动弹簧作用下向外摆动,制动衬垫闭合并夹紧大车车轮轮缘两侧面上并产生规定的夹紧力。
2 电动夹轮器的安装与调试
2.1 安装前的准备
为了保障电动夹轮器功能的完整实现,在安装前,需对制动器的各零部件进行检查,确保器件齐全,同时应进行下列4个项目的检查,保障安装过程的顺利进行:
(1)制动器动作是否灵活,各活动铰点有无锈蚀卡死;
(2)制动衬垫及车轮摩擦面是否沾有影响摩擦力的油污、油漆及其他杂质;
(3)检查制动器安装孔的位置、安装表面的平整与清洁;
(4)检查制动器铭牌内容是否与选型一致。
2.2 安装
液压式夹轮器在安装时,需要先将液压站安装到位,并布置好输油管道,再将液压管路与制动器油缸的进油口连接,而且如有单向节流阀,则需要先将节流阀与制动器油缸相连,再与管路接通,安装步骤较为复杂。
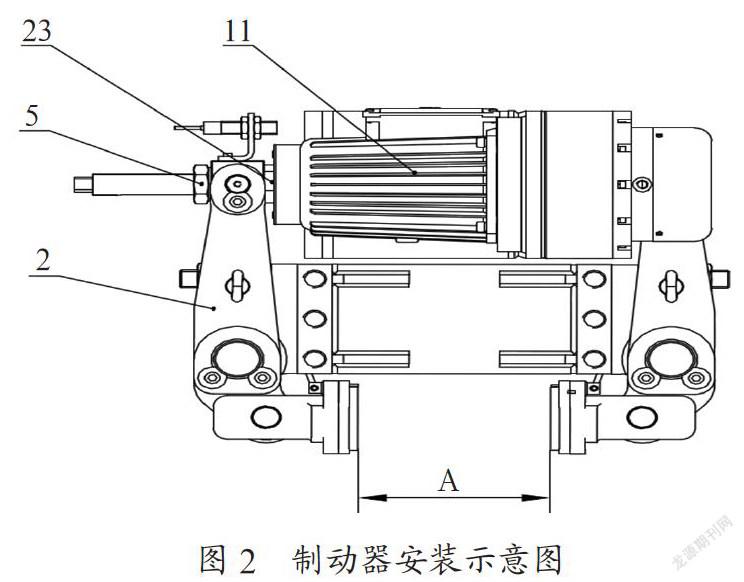
而相比之下,电动夹轮器安装前只需将安装支架加工好。再根据图2示意图,按照以下步骤进行安装即可:
(1)顺时针旋转锁紧螺母(件5),使之向电动推杆(件11)侧移动一定距离并同时缩短连接杆(件23)的连接长度;
(2)将制动臂(件2)向电动推杆方向移动,使A尺寸大于车轮宽度;
(3)用合适的工具吊装制动器(参见图1),平移至轮边制动器的安装架,并用螺栓连接;
(4)将制动器调整对中;
(5)安装并调整后制动器要满足运行规程的要求。
电动夹轮器最显著的特点是装有电机、电磁铁、电感式接近开关,用于开闸时的连锁保护或信号、故障显示。而电机、电磁铁和电感式接近开关都在出厂前已初装好,只需要在使用前进行相关检查并按主机要求配接相应的软电缆即可,极大地节省了夹轮器的安装耗时,有效地提高了作业效率。
2.3 调试
相较于传统夹轮器和液压式夹轮器而言,电动夹轮器的调试过程不涉及液压站的调整,自动化程度高,调试过程简单便捷。其主要调试内容包括以下5项:
(1)判断制动器电机接线是否正确。当所有接线和制动器确认安装完成后,测试电机短时间得电(每次得电不超过2s),观察滚珠丝杠是否收缩,若收缩则继续后面的操作;若丝杠顶出,电机电源线接反,则应立即断开电源,重新正确接线,方可继续后面操作。
(2)制动器打开间隙及夹紧力调整。制动器打开间隙(释放状态下制动衬垫与车轮制动表面之间的间隙)的大小将直接影响制动器夹紧力的大小,在使用之前必需调整到规定的额定值,确保闭合制动器时,测量丝杠与缸体的尺寸符合运行规程要求。
(3)制动器随位弹簧调整。制动器在两个瓦块上设置了瓦块自动随位装置,并且在制动器出厂时已经调整好,如工作时不正常只需拧松随位弹簧紧定螺钉,使随位弹簧处于松驰状态即可。
(4)制动器退距均等调整:1)手动或电动打开制动器,观察两侧衬垫到车轮侧面的间隙是否相等,如不等则需进行调整;2)逆时针旋转两侧调整螺栓锁紧螺母,使之松退;再逆时针旋转间隙较小侧的退距均等调整螺栓,使之松退且到安装底座侧面有足够的间隙;3)顺时针旋转间隙较大一侧的退距均等调整螺栓,使之顶住安装底座侧面,继续旋转就会发现,此侧的间隙变小,另一侧会变大,观察两侧间隙,直至符合要求为止,再顺时针旋转两端的调整螺栓锁紧螺母,直至拧紧为止。
(5)制动器开关调整。电动夹轮器需进行感应式限位开关调整,使制动器处于打开状态,拧松限位开关的开关螺母,左右移动感应开关,打开与闭合制动器,检测限位开关信号,使限位开关在制动器打开时有信号发出,闭合时无信号发出即可。
3 运行和维护
3.1 电动夹轮器的跑合
电动夹轮器在投入使用前应进行动态试跑合,其具体步骤如下:
(1)闭合制动器,大车驱动电机通电运转,使大车轮在制动器闭合状态下运转2~3圈,打开制动器,观察制动衬垫的摩擦表面与车轮两侧摩擦面的贴合情况,如贴合面积大于80%,则停止跑合。如达不到,则重复以上步骤,直至满足要求为止。
(2)在进行试车跑合中,应随时检查如下情况:1)衬垫与车轮两侧摩擦面贴合状况;2)制动盘温度(不应超过350℃);3)螺纹连接件是否松动;4)开关信号是否正常;5)制动、运转声音是否正常。
当试车运行正常后,制动器才可正式投入使用。
3.2 维护
液压式夹轮器在维护期间需要从制动器液压缸观察窗口检查是否有碟簧碎裂和液压油泄漏至碟簧处,如碟簧碎裂或漏油,必须更换新配件或维修,由于制动器液压缸拆卸过程较为繁琐,往往要耗费大量时间。
相比于液压式夹轮器而言,电动夹轮器的维护则较为简单,只需每7~10个工作日对制动器及车轮两侧摩擦面状态的性能进行检查即可,检查的主要项目包括以下6个内容:
(1)制动器夹紧力及衬垫打开间隙:检查或重新调整夹紧力及衬垫打开间隙;
(2)制动器两侧衬垫打开间隙均等情况:当制动器两侧衬垫打开间隙不均等时,要进行重新调整;
(3)衬垫厚度及磨损情况:当衬垫的摩擦材料部分厚度≤3mm时,要更换衬垫;
(4)连接销轴是否转动灵活:如有卡滞现象排除或者更换轴套;
(5)车轮两侧摩擦面清洁情况:如有油污、焊渣等影响摩擦系数的杂物,应进行清理;
(6)限位开关:检查限位开关是否正常工作,否则进行调整或更换。
另外,本文根据电动夹轮器的运行特点,总结归纳了电动夹轮器在运行过程中的常见故障以及对应的解决措施,如表1所示。
4 结 论
电动夹轮器的出现为室外大中型起重机及港口装卸机械工作狀态下的防风制动和非工作状态下的辅助防风制动提供了可靠的安全保障,其独特的结构为实现夹轮器运行的经济性、安全性、高效性提供了依据,同时由于采用清洁电能,也保障了夹轮器运行过程满足新时代对绿色环保的要求。
参考文献:
[1] 交通部水运司.港口起重运输机械设计手册 [M].人民交通出版社,2001.
[2] 蔡淋霖.取料机夹轮器制动系统的改造 [J].港口装卸,2017(3):32-34.
[3] 吴峰崎,许海翔,姚文庆,等.夹轮器抗风防滑能力试验动态仿真研究 [J].制造业自动化,2013,35(11):77-79+88.
作者简介:叶海青(1982.09-),男,汉族,漳州长泰人,工程师,本科,研究方向:电气工程及自动化。
