车载式地铁轨道缺陷巡检系统关键技术研究
2019-09-10胡怡东曾明
胡怡东 曾明

摘 要:车载式地铁轨道缺陷巡检系统是一套功能完善、性能优良的基于计算机视觉、深度学习的巡检系统,集成了扣件检测、轨枕检测、异物检测、钢轨检测、感应板检测五个检测模块以及缺陷检测位置定位等,结合Tiny YOLOv3初次检测识别和改进的YOLOv3二次检测识别的目标检测算法,能够精确定位缺陷位置,实时根据所采集的图像对轨道缺陷进行智能识别、判断和分类,最后将轨道缺陷信息数据通过客户端软件存储及上传至电脑端实时显示,相关维修人员能够及时发现故障隐患并进行检修,从而提高了轨道线路巡检效率和准确率,保障了地铁列车的运行安全。
关键词:计算机视觉;深度学习;检测模块;精确定位;智能识别
中图分类号:U239.5 文献标志码:A
引言
地铁在日常城市生活中承担着重要的交通职能,它方便了人们的交通出行,缩短了区域间的通勤时间,为社会经济建设提供高效、有力的交通保障。然而高速、快捷的背后是轨道安全所面临的巨大压力与挑战,如高频率的列车发送让轨道处于高负荷状态,进而引发轨道状态异常,威胁列车行驶安全。针对轨道安全问题,人们提出了一些检测方法,总结起来有扣件缺陷检测、钢轨裂纹检测、轨枕破裂掉块检测、感应板移位检测、异物检测等[1-3]。
传统的扣件检测方式是采用人工巡检,该方法虽然简单,但效率低、成本高、漏检率高、安全隐患大,且不能判断扣件的松脱程度[4-6]。基于计算机视觉的扣件检测有主成分分析(Principal Component Analysis,PCA)+支持向量机(Support Vector Machines,SVM)、小波分析+BP(Back Propagation)神经网络等识别方法,但它们都需要提取扣件的大致区域再进行状态识别,其次均只能识别扣件是否脱落,不能识别出扣件松脱的具体程度[7-9]。除视觉之外,还有利用振动能量谱进行扣件状态识别,但它需要在扣件之间安装传感器节点,具有工程量大、成本高,同时难以维护等缺点[10]。
钢轨裂纹检测大多采用激光传感器的方法,该方法由于在高速以及列车晃动情况下会导致激光数据误差较大,所以只能局限用于低速轨道检测车,不能很好满足高速车载实时检测的需求[11-12]。对于轨枕检测,文献[13]和[14]基于图像处理算法分割出轨枕区域,然后结合粗糙集人工神经网络训练再检测,虽然能检测出一部分轨枕裂纹掉块,但缺点也是显而易见的:基于图像处理的分割算法容易受到光照、角度以及外界复杂多变环境的干扰导致分割效果不好,其次人工神经网络结构较为简单、深度较浅,同时由于是人为选取图像特征,会导致最后检测效果不是特别理想。感应板移位检测方法是利用多个激光传感器来分析感应板位置信息,从而判断感应板移位情况,但它需要事先进行标定,而且容易受到列车摆动的影响[15-16]。对于异物的检测,有学者利用传统图像处理和SVM支持向量机进行分类识别,但SVM属于机器学习算法,和深度学习算法相比仍有提高空间[17]。
综上所述,地铁轨道缺陷巡检系统仍需要选取更加先进的检测手段及数据分析技术,保障列车运营安全,节约运营成本。因此,本文提出了一个功能完善,性能优良的基于计算机视觉、深度学习的车载式地铁轨道缺陷巡检系统,并对其关键技术进行研究,提高了轨道线路巡检效率和准确率,为地铁的安全行驶保驾护航。
1 系统构成
本文所提出的车载式地铁轨道缺陷巡检系统结构框图如图1所示,该系统主要由安装在电客车底部的检测梁、安装在车轮轴头上的速度传感器、安装在车内客室座位下的检测机柜、部署在云服务器上的检测数据处理服务器程序和安装在终端监控计算机上的客户端程序等组成。其中,检测梁上安装有高清成像组件、同步装置以及电子标签读卡器;车内检测机柜内包括检测主机、3G/4G无线模块、移动硬盘盒以及电源装置等。
2 关键技术
车载式地铁轨道缺陷巡检系统识别判断流程主要包括数据采集、缺陷检测、缺陷识别以及数据存储与上传等。其中较为关键的技术包括:1、轨道缺陷检测,其包括了扣件检测、轨枕检测、异物检测、钢轨检测、感应板检测五个检测模块以及缺陷检测位置定位;2、在结合基于计算机视觉、深度学习算法,以及Tiny YOLOv3初次检测识别的基础上,改进的YOLOv3二次检测识别的目标检测算法实现毫秒级识别,识别效果较好;3、数据存储于上传。
2.1 轨道缺陷检测
2.1.1 扣件检测
在列车高速行驶时,为了确保每个扣件被拍到,且具有高的识别率,对扣件检测算法提出了严格的要求:通过实测得到两个扣件之间距离为0.6m,列车按照最高时速120km/h考量,采用4路相机进行扣件检测,从而计算得到每个扣件从采集、预处理到识别的整个过程要保证在4.5ms内完成。
1、扣件训练
要训练得到好的模型,就必须保证样本的均衡性以及网络参数的调优。在样本均衡性方面,采用“误识别再训练”的思路,先训练一个粗略模型识别,然后筛选出误识别扣件,再从误识别扣件中随机选取一部分进行再训练。通过这样不断强化优化训练,最终保证了训练库样本的均衡性和多样性,实现了较好的识别效果。扣件训练分为了6个类别,编号0-5,分别对应弹条正常、弹条松动、弹条脱落、螺丝正常、螺丝松动、螺丝脱落。采用此分类方法一方面是由于扣件彈条与螺丝本身独立性决定的,另一方面可以通过分开识别判断出弹条松动的距离。
2、扣件识别
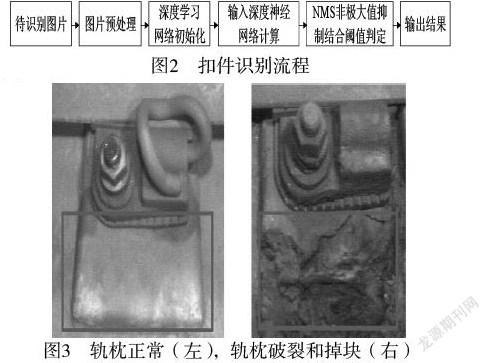
经扣件检测后,进行扣件识别,扣件识别流程如图2所示:输入待识别图片,经过去噪、滤波等基本图像预处理,然后再进行图片裁剪和归一化;初始化深度神经网络配置网络参数、加载网络模型后,将归一化后的图片输入到深度神经网络进行矩阵计算,提取并匹配特征得到输出,再利用NMS非极大值抑制结合阈值判定过滤掉错误匹配,最后输出最终结果。输出结果包括每个弹条或者螺丝的位置坐标,及其对应的状态类型(正常、松动、脱落),如果弹条松动还将返回松动距离。
2.1.2 轨枕检测
轨枕检测主要检测识别轨枕破裂和掉块的情况。由于上一小节已经能够检测到扣件,而轨枕区域位于扣件正下方,所以只需要裁剪出轨枕区域即可,对裁剪出的区域利用SVM支持向量机分类器算法进行训练,然后识别判断。裁剪区域如图3所示。
2.1.3 异物检测
异物检测模块主要负责检测出轨道两侧和内部的非铁轨相关的物体,比如维修工落下的螺丝刀、扳手,或者一些垃圾杂物等。
第一步:先利用传统图像识别算法,结合异物的边缘和梯度信息初步筛选出疑似异物图片,图6(a)是包含异物扳手螺丝刀的原图,经过滤波和边缘检测后,再经过形态学的闭运算操作后,寻找连通域返回轮廓。
第二步:在第一步的基础上虽然能识别出异物,但由于轨道外部环境复杂,导致了很多误识别的情况。
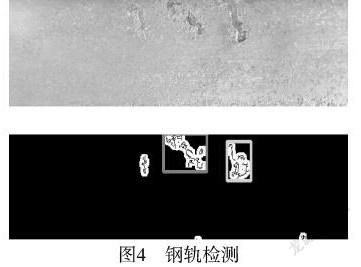
2.1.4 钢轨检测
钢轨检测主要目的是检测钢轨表面的划痕或者裂纹。传统图像处理识别采用与异物识别相同的思路,都是经过滤波去噪、边缘检测、形态学的闭运算操作、寻找连通域返回轮廓,再根据轮廓面积阈值过滤掉干扰区域进行检测,图4是经误检过滤后的钢轨表面划痕或裂纹区域。
2.1.5 感应板检测
感应板检测模块主要负责感应板移位的检测判定。直接方式较难识别,因为移位的样本难采集,且能采集的样本也很少,所以很难训练。通过观察发现两块感应板被扣件卡住,间隙位于扣件正中,因此可以對感应板缝隙旁进行划线标记,当识别出“划线”相对于扣件的位移时,即识别出感应板的位移。
2.1.6 缺陷检测位置定位
轨道缺陷检测结果的数据只有和缺陷在线路上的实际位置对应起来,才能有效地指导维修,系统包含了速度传感器,轨枕感应传感器,同步触发控制器,电子标签阅读器和检测主机,结合多种信息进行综合定位判断,以保证检测位置测量的准确性。
2.2 改进的YOLOv3算法
对于高速车载的巡检系统,采用高性能的YOLOv3算法能很好满足实时需求。
YOLOv3网络结构中采用了大量的残差网络,如图5所示。它具有以下好处:网络越深表达的特征越好,分类和检测效果都会提升。残差中的1 x 1卷积,使用network in network网中网的想法大量减少了每次卷积的channel通道,一方面减少了参数量,另一方面减少了计算量。
同时YOLOv3一共输出三种下采样特征图,尺寸分别为13*13,26*26,52*52。其中13*13特征图对应着大目标的检测,26*26对应着中目标的检测,52*52对应着小目标的检测。另外采用了K-means算法为每个尺度特征图训练,得到3种先验框,让其能更为准确的预测目标的坐标框。
为了更好地满足巡检系统的需求,提出了6个尺度的密集多尺度预测,下采样的特征图尺寸分别为:4*4,8*8,16*16,32*32,64*64,128*128。
其次改进了多尺度先验框,因为原本YOLOv3是基于coco数据80类目标,经过K-means聚类算法得出3个尺度特征图的9个先验框。为了进一步更精准地预测巡检目标的坐标框,利用K-means聚类算法训练了螺丝、弹条、轨枕的先验框,最后得到6个尺度特征图,18个先验框。
2.3 数据存储与上传
系统将检测出的缺陷信息和位置信息通过无线网络实时发送至巡检系统云服务器,利用云计算技术分析和处理检测数据,最后将轨道缺陷信息数据通过客户端软件存储及上传到电脑上实时显示,实现缺陷图片查看、对比、数据统计、分析、生成报表等功能。
1、用户登录
登录界面如图7所示,授权用户可通过输入用户名和密码登录客户端软件系统。
2、主页动态
主页动态实时显示最近的缺陷图片、近期缺陷趋势图、缺陷数量统计、车辆位置信息、设备故障报警。
3、巡检管理
巡检管理可以对各种缺陷类型图片预览查看。可按照站点区间、时间段、缺陷类型分类查看;可实现图片的放大、缩小、缺陷详细信息的展示;可显示的图片类型有道岔图片、焊缝图片、扣件缺陷图片、轨枕破损图片、道床异物入侵图片、钢轨裂纹图片、感应板移位图片。
4、统计分析
将大量的历史数据进行归类统筹生成报表预览。可以统计不同站点区间段、时间段的缺陷类型数量、趋势。预览形式有曲线、柱状图、PDF文档、报表。
3 系统验证核实
为了验证车载式地铁轨道缺陷巡检系统在线检测的实际检出率,于2018年11月22日晚将169170电客车行驶到广州地铁八号线,预先设置好缺陷,将列车通过,对现场缺陷进行检测,并随后统计实际数据。
表1给出螺栓缺失的验证信息现场核对表,图8和9给出了螺栓缺失缺陷检出图片和现场图片的对比图,验证了车载式地铁轨道缺陷巡检系统基于上述关键技术具有轨道缺陷检测精确的优点。
车载式地铁轨道缺陷巡检系统自11月在广州地铁八号线安装以来,每天能检出弹条缺失、弹条松动、螺栓缺失、道床异物缺陷等轨道缺陷,且检测快、识别准,能够及时地向相应维修工班提供故障信息和故障位置,从而能及时处理地故障,保障地铁的安全运营。
4 结论
本文提出的车载式地铁轨道缺陷巡检系统集成了扣件检测、轨枕检测、异物检测、钢轨检测、感应板检测五个检测模块以及缺陷检测位置定位,利用计算机视觉、深度学习,结合目标检测算法实时采集轨道道床空间全断面高清晰图像、精确检测列车运行位置以及智能识别轨道缺陷,并将检测数据通过客户端软件存储及上传到电脑实时显示,方便工作人员监视,及时处理故障。以广州地铁8号线为例,验证了本文所提出的车载式地铁轨道缺陷巡检系统具有检测快、识别准,能够及时地向相应维修工班提供故障信息和故障位置,保障了地铁运营安全,节约了地铁运营成本。
参考文献
[1] 韩强,任盛伟,戴鹏等.轨道状态巡检系统[J].铁路技术创新,2012(01):48-50.
[2] 胡春雄,布春明,李海峰.智能巡檢系统在线路运行中的应用[J].山西电力,2006(b10):29-30.
[3] 赵泽霖.高速轨道电力巡检系统设计与实现[D].电子科技大学,2015.
[4] 黄海军,张飞龙.浅谈轨道巡检系统在城市轨道交通的应用[J].山东工业技术,2017(22):119.
[5] 韩强,戴鹏,谭松等.车载轨道巡检系统研制[J].铁道建筑,2014(11):144-147.
[6] 徐瑞梅.铁轨缺陷自动检测系统的研究[D].大连海事大学,2003.
[7] 谭伟.基于图像的铁轨缺陷检测系统的算法研究及软件设计[D].大连海事大学,2004.
[8] 许贵阳,史天运,任盛伟等.基于计算机视觉的车载轨道巡检系统研制[J].中国铁道科学,2013,34(01):139-144.
[9] 王留军,张鹰.基于机器视觉的车载式铁路轨道智能巡检系统研究[J].成都信息工程大学学报,2016,31(02):185-189.
[10] 徐磊,陈宪麦,徐伟昌等.小波能量谱在铁路轨道检测中的应用[J].振动工程学报,2014,27(04):605-612.
[11] 顾桂梅,刘丽,贾文晶.一种钢轨裂纹红外图像处理算法研究[J].铁道学报,2018,40(11):129-133.
[12] 杜晨琛,刘文波,陈旺才.多传感器特征决策融合的钢轨裂纹识别方法[J].电子测量技术,2017,40(11):157-160.
[13] 李志,陈建政.基于图像处理的铁路轨枕分割方法研究[J].科技创新与应用,2015(11):10-11.
[14] 雷华堂.基于粗糙神经网络的轨枕缺陷检测研究[D].西南交通大学,2011.
[15] 崔言坤.感应板检测系统的研究[D].北京交通大学,2009.
[16] 刘素云.广州轨道交通四号线直线电机车辆段感应板安装技术[J].铁道建筑技术,2006(06):34-37.
[17] 同磊.基于机器视觉的轨道交通线路异物检测技术研究[D].北京交通大学,2012.
