国内超硬材料六面顶液压机工作缸同步充液过程的控制方法及设备改进技术的研究
2019-09-06罗小伟龙雷明乐兴旺
袁 源,罗小伟,龙雷明,乐兴旺,黄 超
(1.桂林桂冶机械股份有限公司,广西 桂林 541004;2.桂林同力自动化有限责任公司,广西桂林 541199)
随着国内超硬材料行业对高温高压合成环境的指标要求不断提高,六面顶压机在工作过程中腔体的均一性、稳定性及安全性越来越多地受到技术人员的重视。国内装备技术人员通过多年研究已经清晰地认识到充液过程对叶蜡石密封边乃至整个合成块高压下内部结构的形成具有非常重要的意义。
六面顶压机的“充液”过程是指六面顶压机在三个活动工作缸活塞行程到位以后,六个工作缸进入同步加压工作状态,顶锤从接触到开始同步挤压叶蜡石块,工作缸压力同步上升至10MPa左右而形成的均匀超高压密封体系的过程。
与普通单活塞作用压力设备不同,六面顶压机依靠六个工作缸同步加压来完成充液动作,并通过活塞的相互位置关系来建立超高压密封系统。“六面顶压机是六个方向均主动地可以调整,尤其是当我们有了相对平衡理论以及有了高精度控制系统后,这类压机各方向的压力完全可以由人们进行任意调整”[1],由于充液动作更加复杂,每个环节的误差累积量导致超硬材料六面顶压机建立的超高压环境存在更多的不确定性,这些不确定性映射到制品生产环节就直接导致了工艺重复性差,产品质量不稳定。因此,提升充液同步控制技术,对普遍提高超硬材料六面顶压机制品质量具有非常重要的意义。
1 充液过程分析
从最终结果来看,压机的充液动作完成的是一个由活塞无负载空程前进到负载加压状态的临界转化过程。详细分析六面顶压机的整个充液过程,实际上可以分为三个阶段。
1.1 合成块宏观位移及自找正
通常为保证安全、防止撞块,活动缸顶锤与叶蜡石表面之间有一个0.8mm至1mm的间隙,因此在行程到位转入充液阶段的瞬间,三个活动缸顶锤并未真正接触叶蜡石,相反由于合成块摆放位置的原因,叶蜡石的另外三个面则紧紧地贴住三个固定缸顶锤面。
因此,当六个顶锤进入同步前进状态时,首先是消除这三个方向上的间隙。理论上说,假设六个工作缸运动完全同步,则在充液前期是三个固定工作缸推动叶蜡石向活动缸侧先产生了0.4mm至0.5mm的位移,之后同时接触到三个活动缸顶锤。也就是说在充液的第一个阶段,叶蜡石是被逐步推到压机的几何中心,并与六个顶锤完全接触的。这个过程实际上是一个宏观的自找正过程(见图1)。

图1 合成块的自找正Fig.1 The block alignment
但实际上由于叶蜡石本身几何尺寸误差、活塞行程控制不精确、工作缸运动不同步等原因影响,总会出现某一个方向上的一对顶锤先接触叶蜡石,夹紧合成块,并限制其它方向上的自由移动,亦即这个自找正过程的结果几乎是不确定的,并且从一开始就存在一定应力。
在这个阶段,工作缸内只需要很低的油压即可推动活塞,而在通常状态下,这一阶段持续时间也很短,六个顶锤很快就能全部完成紧贴合成块的动作,而在此过程中产生的定位偏差,将彻底决定设备在高压下的工作稳定性。
1.2 叶蜡石形变及密封边的形成
在六个顶锤完全接触合成块以后,工作缸继续向前移动,叶蜡石受力压缩产生形变。这个过程中,合成块被不断压缩,顶锤与合成块表面的压应力会不断增大,工作缸的油压也会逐渐上升。同时由于叶蜡石本身在高压下具有一定流动性,发生塑性形变的叶蜡石的一部分会顺着顶锤斜面之间的缝隙向外流动,并逐渐填满缝隙。
随着顶锤挤压的深入,顶锤之间的缝隙不断缩小,而流入缝隙的叶蜡石逐渐增多,顶锤小斜面与缝隙内叶蜡石之间的正压力不断增大,两者之间的摩擦力也随之增大,当缝隙内的叶蜡石足够多,摩擦力也足够大时,最终能有效阻碍更多的叶蜡石流出。此时,已经被挤出的叶蜡石就形成了一道完整覆盖合成块十二道棱边的高压密封边,这道密封边有效地将合成块内的超高压封锁在六个顶锤面围成的高压腔内(见图2)。

图2 形成密封边Fig.2 Forming a sealing edge
事实上,完整的密封边一旦形成,合成块与顶锤之间就建立起一种非常稳定的平衡,此时无论顶锤正压力如何继续增大,顶锤斜面的侧向分力总是按一定的比例转化成足够的摩擦力,把叶蜡石牢牢锁在高强腔内部,而多余斜面正压力则通过叶蜡石密封边相互抵消掉了。
但是由于合成块材质的不均一性和单缸系统阻尼的问题,密封边形成过程中总会出现不同程度的不对称,即通常观察到的密封边厚薄不均匀,在这种不对称的情况下,密封边的最大密封能力是以整个系统中最薄弱的环节来计算的,也就是说,不对称程度越严重,高压密封性能越弱。
1.3 合成块内部叶蜡石流动及压力梯度场建立
密封边形成以后,在顶锤与合成块共同构成的高压腔内,应力是非常不均匀的,叶蜡石与顶锤锤面中心接触点的平均压强可能超过10GPa,合成腔中心的压强通常可以达到4GPa至6GPa,而密封边最外侧压强则接近0。
在这种环境下,为适应不均一性,系统必须进行整体结构调整。由于叶蜡石在高压下具有一定的流动性,在高压合成腔内,压强较高区域的叶蜡石会缓慢地向周边压力低的区域流动,通过改变密度来调整梯度平衡,最终建立稳定规则的压力梯度场(见图3)。
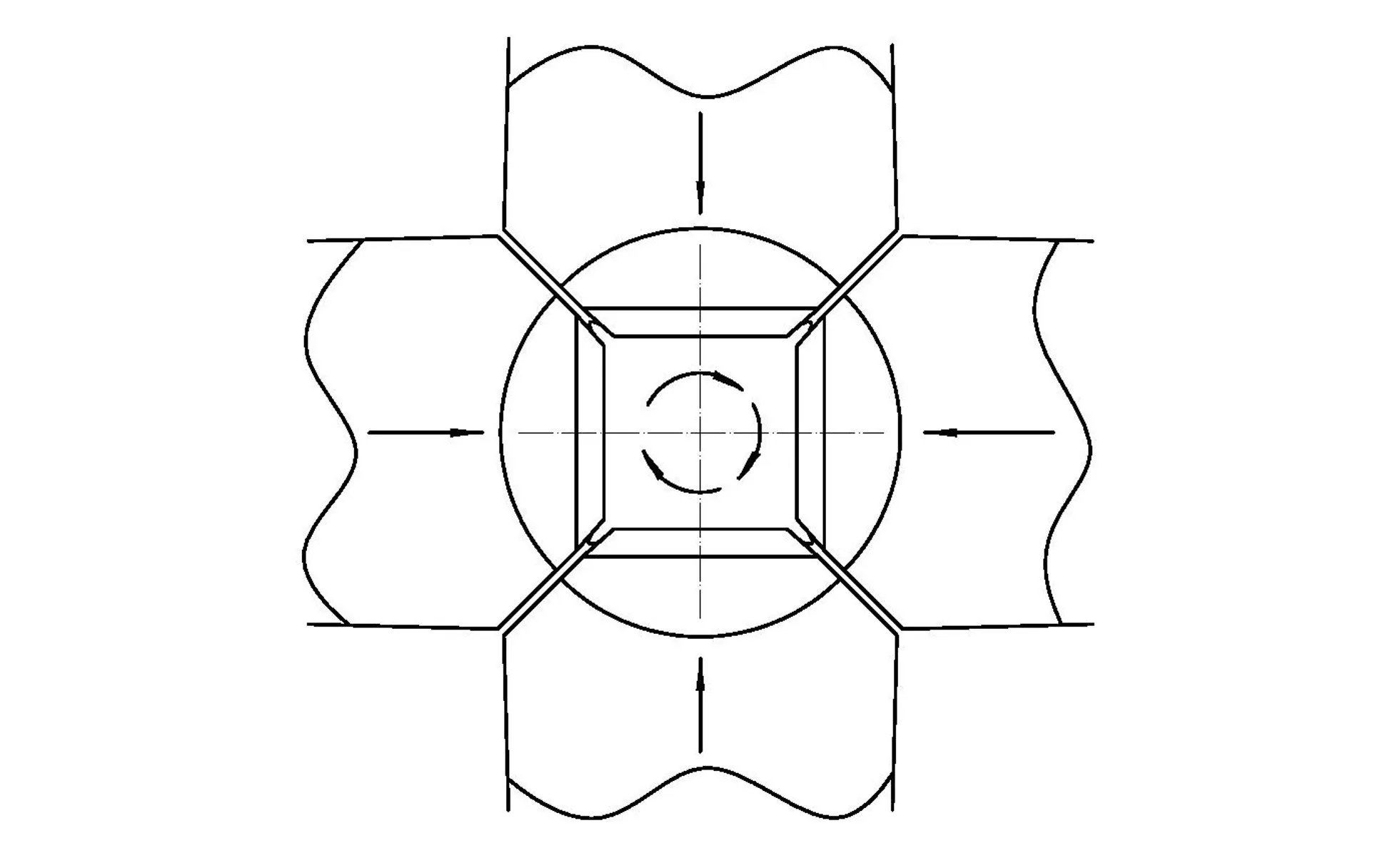
图3 稳定压力场梯度Fig.3 Steady the pressure gradient field
事实上压力梯度场调节在密封边形成阶段就不断在进行,只不过前期由于系统外环境的快速变化,内部压力调节作用非常剧烈,并且处于无序、混乱的状态。只有当密封边完全形成以后,调节作用才开始逐步生效。此后叶蜡石的内部流动及压力场梯度调节会一直持续到合成工艺结束。
但随着外部环境的稳定,压力场梯度变化会越来越缓慢,特别是加热以后,高温区域的叶蜡石会变硬,流动性会进一步减弱,此时系统的调节能力会大幅度降低,内应力会大幅度增高,这也是泄压阶段出现放炮的主要原因。
因此,在充液阶段后期,实际上是合成块内部形成稳定合理的压力梯度场的阶段,这一阶段形成的压力梯度场的稳定性将直接决定后期加热、停温、泄压过程密封的稳定性。
2 国产六面顶压机充液控制技术现状
目前,国产六面顶压机充液控制主要有以下几种技术方案:
2.1 连通充液
连通充液的基本原理是在充液阶段直接将六个工作缸连通,通过液压系统的压力等效传递原理使六缸压力自始至终保持相等。
连通充液实际上是六面顶压机经典的连通超压方案的延伸,其最大的优势在于结构简单,操作方便,并且在与连通超压工步切换时过渡平稳,没有冲击。
但是,连通充液模式虽然很好地解决了工作缸压力一致性问题,但完全忽略了由于活塞阻力和各工作缸油路长短差异造成的六缸位移差异。特别是在充液的前两个阶段,由于工作缸压力还没完全建立起来,六缸位移差异会尤其明显,而这两个阶段恰好是叶蜡石自找正和密封边建立的关键阶段,这两个阶段产生的同步误差对整个高压系统稳定的影响是非常严重的。
严格来说,连通充液是一种完全没有反馈,无法调整位移同步的充液控制方式,从控制角度方面看是非常粗放、不符合设计要求的。
2.2 不连通充液
不连通充液是在充分考虑了由于活塞阻力和各工作缸油路长短差异造成的六缸位移差异的基础上设计的同步控制方式。其主要原理是,在充液过程中将六个工作缸供油油路独立,每条油路上设单向阀、节流阀。设备使用者可以通过调整每条支路上节流阀的开度来改变各工作缸充液流量,并进一步实现位移同步调整。
但是,现有的不连通充液存在两个较大的缺陷:
1.同步调整操作繁琐,位移同步只能通过测量叶蜡石块三个方向上的尺寸差异来检测,操作人员只能通过反复检测合成块并调节节流阀来修正六缸位移同步,“仅仅靠工人的经验和感觉来重新调整这些参量,那么不仅浪费大量的时间,而且调节的精度和重复性都很差”[2]。
2.系统稳定性差,由于系统本身属于开环控制,不带反馈功能,一旦设备出现磨损,或者合成块个体出现差异,充液同步性就会大幅度下降。
3.充液过程中各缸存在压力差,由于各工作缸系统惯性差异,为平衡差异,各缸的起步压力是不同的,这个压力差在进入六缸连通以后会对系统造成压力冲击,影响密封稳定性。
2.3 组合充液
简单来说,将不连通充液与连通充液方式结合,前两个阶段采用不连通充液,第三个阶段采用连通充液。组合充液控制方法能将连通充液、不连通充液的优点相结合,较好地弥补各自的缺陷,但系统在自动化及控制精度方面仍有较大的改进空间。
综上所述,国内六面顶液压机在充液控制方面的设计仍然处于比较落后的阶段,通过引进新技术,改变设计思路会有较大的提升空间。
3 提高充液同步控制的方法和思路
改进国内超硬材料六面顶液压机工作缸同步充液过程的控制方法应从改进测量技术、引入反馈控制、开发智能算法及提高自动化控制等几个方面入手,重点解决以下几个技术问题:
3.1 六缸位移高精度检测
采用位移传感器检测工作缸行程在六面顶压机上的应用已经接近十年了,但是一直以来仅仅是用作空程前进控制及其它非关键系统参数测量,并没有真正引入核心高压系统控制。主要原因在于针对六面顶压机工作缸行程的大尺寸范围检测重复性差,而高精度的小尺寸检测又一直没有用武之地。
在充液过程中,活塞位移行程为3mm至5mm,这个测量范围内,高精度位移传感器能很好完成精确测量工作,为位移同步提供测量依据。
3.2 高精度压力传感器及精确压力控制
现有的充液控制方法通过给定油泵排量将液压油迅速充入工作缸,工作缸压力随着叶蜡石的压缩自由上升至一个设定值,通常在十几秒内即可完成充液动作,这一过程压力上升几乎完全不受控,而实际充液压力超出设定值20%以上却是常见的。
但事实上,在充液过程中同步性对压力的变化是非常敏感的,在控制系统中选用准确度达到0.01MPa的高精度压力传感器,并对充液压力上升速度进行精确控制非常有助于提高充液同步控制水平。
3.3 比例阀取代节流阀控制单缸流量
目前不连通充液采用六个节流阀手动调节各缸流量,控制精度、自动化水平和抗干扰能力都很差。
采用电液比例阀取代节流阀,能实现各工作缸流量的在线自动调节,不仅有效克服了精度差、重复性差、稳定性差等一系列问题,还能省去繁杂的手动调节工作,确保每一个合成块充液同步性达到最佳。
3.4 六缸位移比较修正算法
在采用位移传感器采集活塞位移,并以比例阀取代节流阀的技术基础上,充液过程中,位移传感器能不断将活塞位移信号反馈到控制系统,系统通过对比六个工作缸的位移情况,及时对位移量超范围的工作缸进行调整,修正其位移量,保证六缸位移同步。通过这种算法能有效实现六缸自动同步控制。
3.5 压力与位移结合的混合控制方式
充液同步控制的最终目标是顶锤位移同步,但实际上是通过调整单缸流量来改变位移变化量的,而产生流量变化的根本原因是压力的变化,因此六面顶压机充液同步过程控制是一个同时控制压力、流量、位移的综合过程。
以往采用的控制方式通常只关注压力或者流量中的一个单一变量,这导致最终控制效果不理想。因此依靠电控系统的运算能力,在控制充液压力稳定上升的同时动态分配各工作缸流量以达到精确控制六缸位移同步,是有效提升充液同步性的正确思路。
4 提高六面顶压机充液过程同步控制精度的技术价值
近年来,国内超硬材料行业快速发展,大量超硬材料制品厂家进入并参与与国际市场的全面竞争。而在石油复合片、加工刀具等高端产品领域,市场普遍反映采用国产六面顶压机技术的产品与国外技术产品的主要差距在于质量稳定性差。因此,从设备控制角度提高充液同步性能就能有效弥补现有技术差距,提升行业竞争力。
具体来说,提高充液同步精度的主要技术价值有以下几点:
4.1 提高高压密封稳定性
采用改进的充液同步控制技术能有效提高充液阶段叶蜡石压缩的均匀性,所形成的密封边也更加对称。能有效提高合成块的高压密封性能,减少各种放炮的几率,提高安全性,降低生产成本。
4.2 提高压力梯度场的均匀性
改进六面顶压机充液同步控制技术有利于稳定合成块内部的压力梯度场,特别是对大合成块生产大尺寸制品,能最大程度提高高压腔容积利用率,增加产品产量。
4.3 提高旁热式碳管电阻的重复性
六面顶压机大规模采用旁热式加热以来,加热电阻一致性差一直是困扰国内六面顶压机用户的老问题。
研究发现:为尽可能增大腔体容积,并提高加热电阻减少能源消耗,行业内普遍将加热碳管设计得非常薄,如此带来的后果是碳管变得非常脆弱。而在充液过程中,脆弱的碳管极有可能随着叶蜡石的收缩随机出现不同程度的开裂或折断现象。进入加热工步以后,碳管的开裂或折痕处会产生接触电阻。由于接触电阻远高于碳管本身的电阻,大部分加热功率都被分配在接触电阻上,导致碳管裂纹或折痕处的温度远高于其它区域。而另一方面,由于充液同步性差,开裂或折痕出现的几率非常大,直接表现就是充液后加热碳管的电阻重复性差。由此,高品级复合片等需要严格控制烧结温度的产品在生产过程中由于温度场分布呈随机状态,产品的质量也就变得非常不稳定。
改进充液同步控制技术以后,能最大程度防止加热碳管的随机损坏,有效提高电阻分布的重复性,提升高端制品的产品质量,为国内制品生产企业提供强有力的技术保障。
5 结论
超硬材料六面顶液压机充液是合成块形成密封体系的的关键工步,采用六缸位移高精度检测技术、工作缸压力精确控制技术、比例流量控制技术及六缸位移比较修正算法对充液阶段的工作缸压力及单缸位移进行结合控制,能有效提高六面顶压机的稳定性,减少放炮,更重要的是提高同步性能有助于提高合成块内部压缩的一致性,减少产品的个体差异,使高端产品生产中的产品稳定性大大提高。
