基于FPGA的CCSDS自适应传输系统
2019-09-06王成华朱秋明张小飞刘伟强孙泽洲
王 乐 王成华 朱秋明 张小飞 刘伟强 孙泽洲 韩 宇
(1.南京航空航天大学雷达成像与微波光子技术教育部重点实验室,南京,211106;2.南京航空航天大学电子信息工程学院,南京,211106;3.英国赫瑞瓦特大学工程与物理科学学院,爱丁堡,EH14 4AS;4.北京空间飞行器总体设计部,北京,100094)
引 言
随着航天技术的发展,空间数据系统咨询委员会(Consultative committee for space data systems,CCSDS)[1]作为一个权威性的国际空间组织,提出了适用于空间通信的各种通信协议和数据处理规范,反映了空间数据系统最新技术发展动态。随着中国航天事业的飞速发展,在深空探测领域逐渐采用CCSDS标准,对深空探测活动的发展具有积极的推动作用。邻近空间链路协议(Proximity-1 space link protocol)是空间数据系统咨询委员会以常规在轨数据系统(COS)[2-3]与高级在轨数据系统(AOS)[4]为基础开发的数据链路层协议,可以满足深空探测任务高效的数据传输需求。
自适应信号处理在无线移动通信领域应用较为广泛[5],通过自适应改变信号功率、信息速率和编码调制方式等提高系统通信质量。深空探测器测控通信距离遥远,与近地测控通信相比,信号的传播衰减大、传输延时长,且信号的传播环境复杂[6]。深空通信的信道状况存在时变性,如果数据传输方式保持不变,通信系统无法适应信道状况的改变,通信质量会受到影响。自适应传输策略则可以根据信道在时域、频域等方面的变化特性,自适应的调整传输参数,使系统在信道质量较好时以较快的数据速率传输;在信道质量差时提升数据抗干扰的能力,降低系统误码率,提高通信质量[7]。航天器测控通信(C&T)分系统使用小型化数字深空应答机,可以把发射机、接收机、编码与调制以及控制功能进行集成。数字通信领域的软件无线电技术通过使用编程能力强的FPGA或DSP器件可以进行应答机的通用化设计,实现数字通信功能。
本文依据CCSDS制定的邻近空间通信链路协议,结合已有的邻近空间自适应传输策略实现方案[8],设计符合协议标准的码速率自适应传输系统,通过FPGA硬件电路对该方案进行系统验证,最后对硬件平台的资源消耗进行比较分析。
1 基于CCSDS协议的系统方案
1.1 CCSDS传输协议
邻近空间通信链路指的是短距离、双向、固定或移动的无线链路,有着时延短、信号能量中等(非微弱信号)、会话简短且功能独立等特征[9]。邻近空间链路(Proximity-1)通信协议是一个双向的链路层协议[10]。邻近空间链路协议在通信过程中支持实时调整传输参数[11],采取先握手设置参数后通信的方式。自适应调整传输参数后,通信双方会重新发起握手过程,恢复中断的通信链路。依据CCSDS-211邻近空间链路协议,器间通信协议发射、接收单元可分为物理层、编码同步子层和数据链路层。其中,物理层定义了器间通信链路的频段分配、握手过程、极化方式、调制方式、数据速率以及系统相关性能指标[12]。编码同步子层定义的相关功能包括数据单元格式(如PLTU)、交互支持所需的编码与同步机制等[13]。数据链路层协议的功能是为发射、接收机之间发送用户数据、状态报告、控制命令等提供支持,根据具体功能不同又可以分为帧子层、介质访问控制子层、数据业务子层和输入输出接口子层[14]。邻近空间通信系统各层与数据和控制流之间的相互作用如图1所示。
本文介绍的CCSDS自适应传输系统依据邻近空间链路协议划分为物理层、编码同步子层和数据链路层。在系统发射端,数据链路层通过编码同步子层和物理层来传输数据;在系统接收端,数据链路层从物理层接收串行输出数据,再通过编码同步子层进行验证,并处理接收到的协议数据单元。
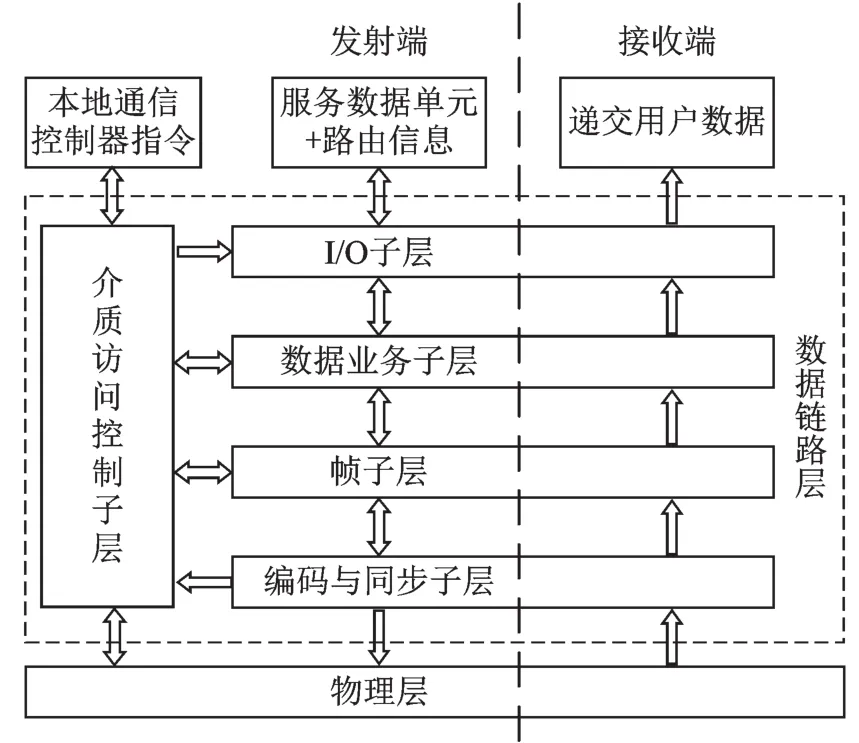
图1 邻近空间链路分层协议模型Fig.1 Layered model for Proximity-1 space link protocol
1.2 系统方案及流程
邻近空间通信系统的协议收发单元既可以控制本地发射、接收机的工作状态,也可以通过邻近空间链路向远程通信伙伴报告本地状态,或者控制远程通信协议收发单元发射、接收机的工作状态。邻近空间通信系统的协议收发单元如图2所示。
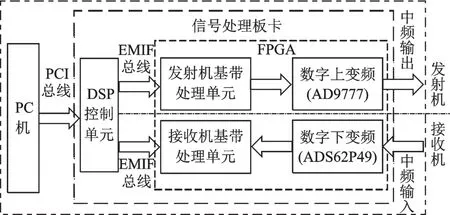
图2 自适应传输协议收发单元Fig.2 Adaptive transmission protocol transceiver unit
邻近空间通信链路中,协议收发单元的接收机基带处理单元接收同步后的数据信息,同时对信号进行信噪比估计,将信噪比估计值与参考值进行比较,判定出最佳的自适应速率,并将判定结果反馈给发射机基带处理单元进行监督协议数据单元组帧。协议收发单元的发射机基带处理单元在协议数据帧传输结束后将切换工作模式,暂停传输协议数据帧,转而发送监督协议数据帧。同时,监督协议数据帧也会传输给接收机基带处理单元。
远程接收机基带处理单元通过提取状态控制字获取数据速率等信息。本地协议收发单元的接收机基带处理单元通过提取监督协议数据帧的状态控制字,改变接收速率。数据速率恢复匹配后,发射机基带处理单元依次从“仅有载波”转换到发送“空闲数据”,重新启动“握手”过程,恢复中断的通信链路,进入“用户数据”传输。
本文自适应传输系统基于邻近空间链路分层协议模型,实现CCSDS标准建议的邻近空间链路通信协议。系统的工作方式为全双工,采用的编码方式为循环冗余编码(CRC-32)、卷积编码(2,1,7),卷积解码方式为Viterbi译码,调制方式为PCM/PM,支持12档数据传输速率,链路提供不大于1×10-6的比特误码率。通信双方依据上述CCSDS协议流程进行握手,采用先握手后通信的方式,支持通信过程中实时调整传输参数,符合CCSDS-211邻近空间链路协议标准。
2 自适应速率算法及FPGA实现
2.1 信号检测
协议收发单元的接收机在整个邻近空间自适应通信传输中需要对接收信号进行变频处理和同步解调的操作,接收机同步解调的性能对通信系统的通信质量十分重要。在对接收信号进行同步解调之前,也需要对前级信号进行合理的检测,来提高接收机的工作性能。通过检测不同通信环境下信道的质量来控制接收机的关闭和开启,不仅可以降低通信设备的功耗,在进行信道估计时也可以提供判断的依据。信号检测方案如图3所示。
使用可编程逻辑器件FPGA进行数字信号处理,往往会引入直流偏置,需要在数字端进行直流偏置的补偿[15]。消除接收信号的直流分量后,噪声能量相对于信号能量较小,选取的信号门限值只要介于噪声能量和信号能量之间即可。当信号的能量P(X)大于门限值β时,认为此时接收到的信号是有效信号;当P(X)小于β时,认为此时接收到的信号不是有效信号。
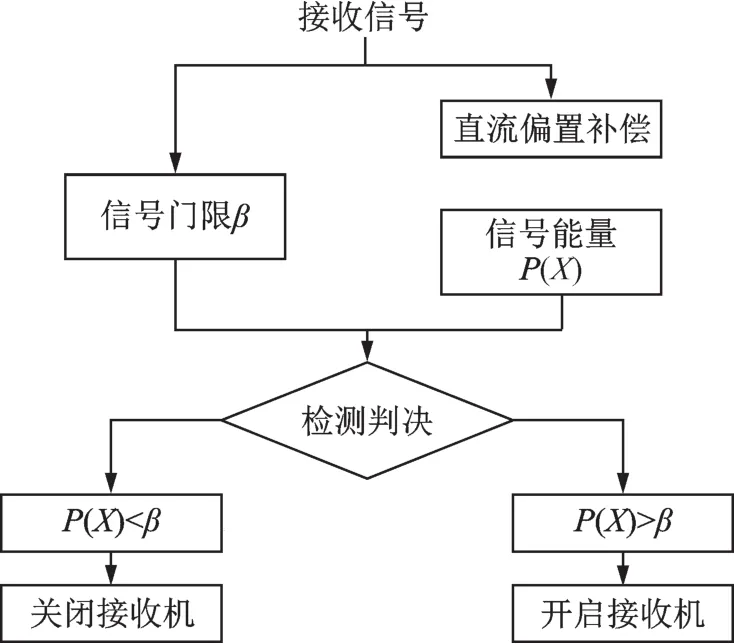
图3 信号检测方案Fig.3 Signal detection scheme
2.2 信道估计
本文中的自适应传输系统是一个稳定的无外界信道环境影响的闭环全双工自适应系统,通过估计当前的信道环境质量选择合适的传输速率,所以需要实时估计接收信号的信噪比。其中,可调数字衰减器用于模拟邻近空间链路环境下通信信道传播衰减,简化原理如图4所示。数字步进衰减器的控制单元是一个6 Bit的串行控制接口,提供的衰减范围最大为31.5 dB,步进为0.5 dB。信号衰减后功率减小,噪声功率基本保持不变,于是信噪比降低,信道估计的信噪比动态范围将扩大。

图4 数字衰减器简化原理图Fig.4 Simplified schematic diagram of digital attenuator
平方信号与噪声方差估计(Squared signal to noise variance,SNV)算法[16]是在PSK信号中进行推导以及应用的,若对PCM/PM信号进行线型近似,SNV信噪比估计算法同样可以应用在PCM/PM系统中。
数据拟合(Data fitting,DF)估计算法[17]使用接收信号的计算统计量z的多项式逼近信噪比λ。通过确定信噪比的估计范围,本方案中λ∈[-5,12]dB,使用函数polyfit得到λ关于z的多次项表达式。在复信道情况下,假设接收信号都是各态历经的,噪声为加性高斯白噪声。统计平均的数据长度K取100,进行1 000次信噪比估计求其平均数值。
在[-10,25]dB范围内对SNV算法的均值及标准差进行仿真。当信噪比的数值提高时,SNV算法的均值以及标准差都会变好。SNV定点化估计在信噪比大于10 dB时,其估计均值和真实值极其接近,仅标准差略微有所增大,能够满足系统信噪比估计的需求;而当信噪比小于5 dB时,信噪比估计误差较为明显。
在[-5,25]dB范围内对DF算法的均值及标准差进行仿真。在信噪比处于[0,10]dB时,3阶多项式数据拟合估计(DF-3)估计性能可以满足系统要求;2阶多项式数据拟合估计(DF-2)估计性能相对较差,但可以粗略满足估测信噪比范围的要求。
SNV估计算法在信噪比低于5 dB时估计性能较差,但在5 dB以上时其估计性能与M2M4估计算法接近[18]。DF估计算法在信噪比处于[0,10]dB时可以用2阶多项式或3阶多项式代替5阶多项式,估计性能满足系统需求,算法实现复杂度也较低。
本文中自适应传输系统采用SNV和DF估计算法相结合的分段估计方法,其基本原理如图5所示。首先使用复杂度相对较低的2阶多项式数据拟合估计信噪比范围。当信噪比小于10 dB时,采用3阶多项式数据拟合估计;信噪比大于10 dB时,采用平方信号与噪声方差估计。SNV和DF分段估计法不仅实现难度较低,硬件资源消耗也相对较少,同时在信噪比估计精度方面也符合系统性能需求。
SNV和DF分段估计信噪比均值分布图如图6所示。从图6可以看出,在[0,25]dB的信噪比范围内,SNV和DF分段估计法估计均值和真实值趋于一致,满足系统信噪比估计要求,也验证了SNV和DF分段估计法的可行性。
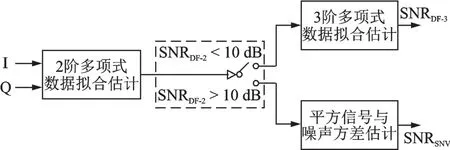
图5 SNV和DF分段估计原理图Fig.5 Schematic diagram of SNV and DF piecewise estimation
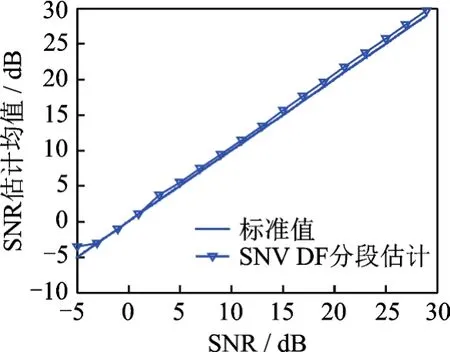
图6 SNV和DF分段估计信噪比均值Fig.6 SNR mean of SNV and DF piecewise estimation
2.3 自适应速率估计
本文重点验证邻近空间通信系统常用的PCM/PM调制方式。邻近空间通信链路支持以下12个固定的前向、反向数据传输速率:1,2,…,2 048 Kb/s,邻近空间通信系统的误码率要求为1×10-6。假设信道噪声为加性高斯白噪声,复信道情况下误码率与输出信噪比的变化关系如图7所示。从仿真图中可以看出,系统误码率要求满足1×10-6时,输出信噪比门限值为15.5 dB(不考虑纠错编码)。
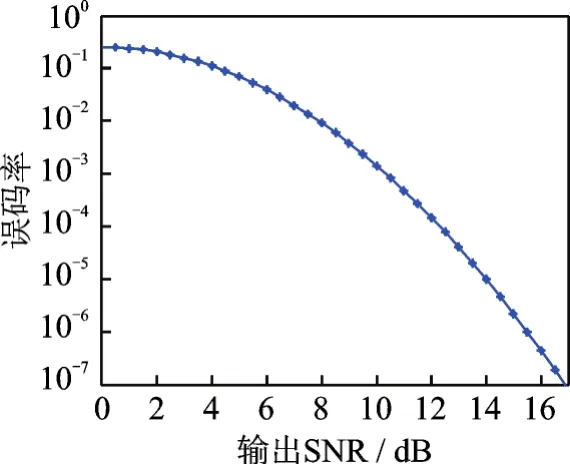
图7 误码率与输出信噪比变化关系Fig.7 Relationship between BER and output SNR
数据传输速率不同,通过信道估计得出的输出信噪比不同。通过式(1,2)可以分析码元速率与输出信噪比之间的关系为
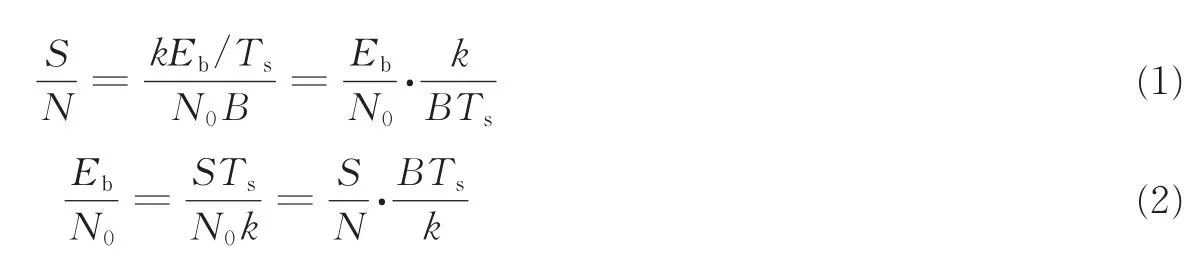
式中:S表示信号平均功率;N表示噪声平均功率;N0表示单边噪声功率谱密度;B表示信号带宽;k表示比特数;Eb表示信号比特能量;Ts表示码元时间宽度。S/N为信号功率与噪声功率之比,即匹配滤波后信道估计的输出信噪比。Eb/N0为信号比特能量与噪声功率谱密度之比。邻近空间通信链路依据Eb/N0自适应调整码元速率。通过S/N和Eb/N0的关系可知,信号码元速率相差2倍时,信道估计的输出信噪比将相差3 dB。
仿真信号的信噪比分别为10 dB和19.8 dB,估计过程中每1 024个点计算一个信噪比值。当信号信噪比为10 dB时,采用DF-3估计法,输出信噪比是10 dB;当信号信噪比为19.8 dB时,采用SNV估计法,输出信噪比也在19.8 dB左右,验证了使用SNV和DF分段估法进行信噪比估计的正确性。
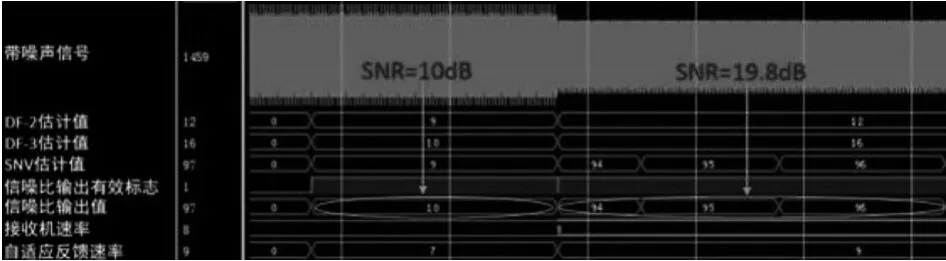
图8 码速率自适应调整硬件仿真Fig.8 Hardware simulation of symbol rate adaptive adjustment
3 系统实测及结果分析
码速率自适应传输过程中,对接收信号进行实时估计,将信道估计得出的输出信噪比与门限值进行比较。通过计算输出信噪比与门限值之间的差值,当差值为正且大于3 dB时,升高信号码元速率;当差值为负且绝对值大于3 dB时,降低信号码元速率。本文中自适应传输系统采用码速率直接切换的方式,相差3 dB对应切换一档数据速率,直接切换至相应的码元速率。最终输出信噪比与门限值之间的差值缩小在3 dB以内,在满足系统误码率要求的同时数据传输速率调整至最佳状态。
码速率自适应调整过程如图9所示。从图9可看出,当输出信噪比35.8 dB时,和15.5 dB相差20.3 dB,提升至最高速率档,自适应速率变为2 048 Kb/s。自适应速率锁定后,状态变为“2”,将结果回传到本地发射机完成监督协议数据帧组帧。自适应反馈信号变成高电平,本地发射机从发送单载波到发送协议数据帧,完成码速率自适应调整,发射信号波形如图10所示。
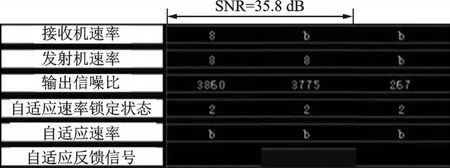
图9 码速率自适应调整过程Fig.9 Process of symbol rate adaptive adjustment
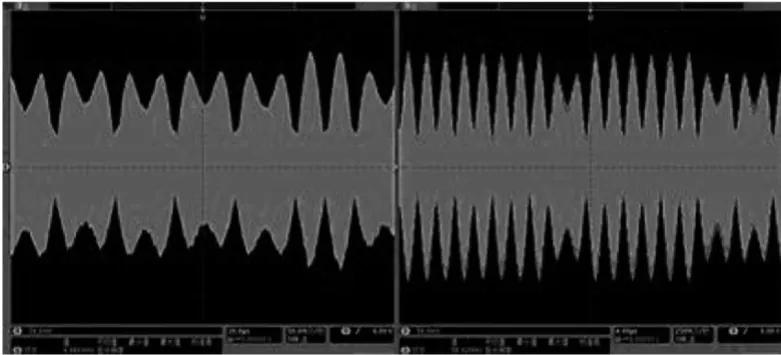
图10 码速率自适应调整发射信号波形Fig.10 Transmitted waveform of symbol rate adaptive adjustment
PCM/PM调制体制下,系统误码率测试统计时长为30 s,码元速率初始值为256 Kb/s。FPGA统计的系统实时误码率如图11所示。通过分析比较可以得出:固定速率传输时,系统误码率基本保持不变;通过码速率自适应调整传输参数,提升了传输数据抗干扰的性能,有效降低了系统误码率。
假设信道噪声为加性高斯白噪声,初始码元速率为256 Kb/s,系统吞吐量仿真统计时长为10 s。自适应调整码速率和固定速率下系统吞吐量与输出信噪比的变化关系如图12所示。从图中可以看出,自适应调整码速率时系统的吞吐量要比固定速率时系统的吞吐量性能更好。输出信噪比低于门限值15.5 dB时,通信系统如果保持固定速率传输,信号的传输质量会受到影响,系统的误码率较高;输出信噪比趋近于门限值或者高于门限值时,由于保持固定速率传输,码元速率较低,通信系统的效率会受到影响。通信系统自适应调整码速率,输出信噪比低于门限值时,系统自动降低码元速率以保证信号的传输质量;输出信噪比趋近于门限值时,与固定速率传输时吞吐量相似;输出信噪比高于门限值时,系统自动升高码元速率,使通信系统的效率提高,并且能够保持较低的误码率。
本文设计的自适应传输系统的硬件平台以Xilinx Kintex-7 FPGA芯片为核心,在协议收发单元内通过信号反馈完成速率自适应。与文献[18]进行比较,结果如表1所示。通过对系统的性能对比分析可知:本文介绍的FPGA通信平台通过增加较少的资源消耗,使系统的误码率、吞吐量性能与其相似,并且不需要协议层软件控制码速率自适应切换,系统的实现结构更简单。
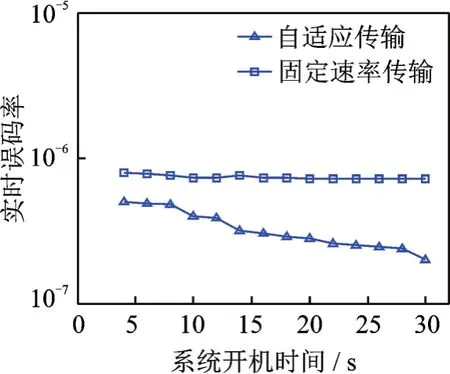
图11 系统实时误码率Fig.11 Real time BER of the system
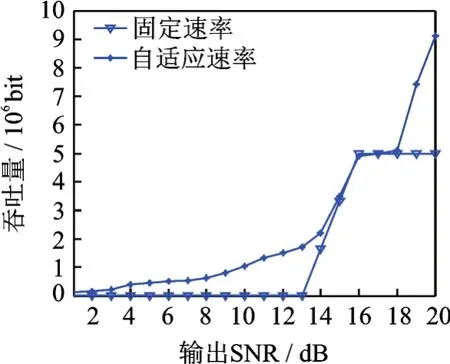
图12 吞吐量与输出信噪比关系(Rb=256 Kb/s)Fig.12 Relationship between the throughput and output SNR(Rb=256 Kb/s)
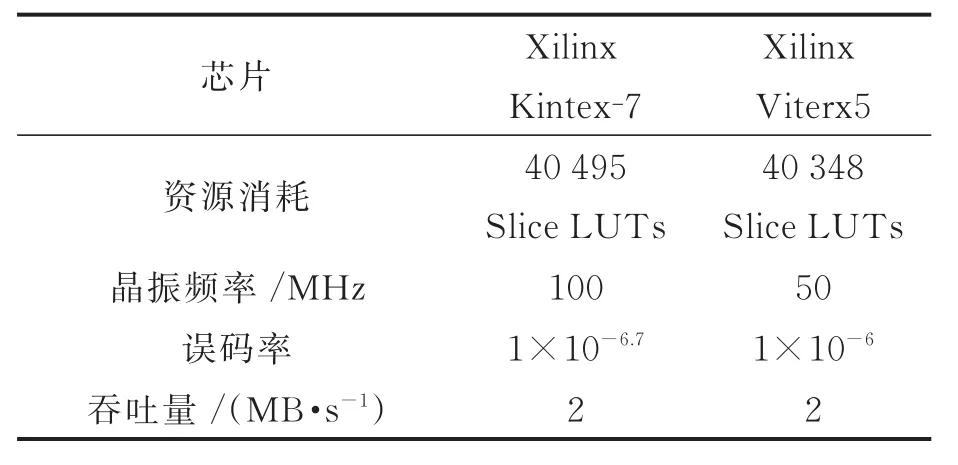
表1 FPGA通信平台性能比较Tab.1 Performance comparison of FPGA communication platform
4 结束语
邻近空间链路通信协议是一个应用于空间探测任务的双向通信协议,可以满足深空探测任务高效数据传输需求。CCSDS邻近空间链路协议在通信过程中支持实时调整传输参数,所以码速率自适应策略符合CCSDS协议标准。本文结合邻近空间链路通信协议的要求,以信道估计的信噪比作为衡量信道质量的标准,设计一种符合CCSDS协议标准的码速率自适应传输系统方案,结合以Xilinx Kintex-7 FPGA芯片为核心的硬件实现平台进行系统验证。实测结果表明,在加性高斯白噪声情况下系统可以实时估计0 dB以上信噪比,并且能够实现码速率自适应调整。相比于固定速率传输,码速率自适应传输系统的误码率和吞吐量性能都有了提升。码速率自适应传输系统方案能较好地解决深空通信环境下使用固定速率进行信息传输通信质量差和系统效率低的问题,在满足系统误码率要求的前提下调整数据传输速率至最佳状态,可以为深空通信数字应答机的设计提供有益参考。
