舰载机的轨迹稳定性及其控制研究
2019-09-05刘涛蒙泽海
刘涛 蒙泽海


摘要:轨迹稳定性是飞机姿态和速度耦合导致的一类问题,轨迹不稳定体现为飞机纵向操纵和实际轨迹变化的不匹配,舰载机进近着舰时多面临此问题。轨迹稳定性的下降与飞机进入第二平飞状态时阻力急剧增大有关。对此设计动力补偿系统( APCS),控制结果表明APCS可以实现在轨迹不稳定情况下的下滑角控制,对于解决舰载机的轨迹不稳定问题有重要的工程意义。
关键词:舰载机着舰;轨迹稳定性;需用推力曲线;动力补偿系统
中图分类号:V212.1
文献标识码:A
DOI: 10.15913/j.cnki.kjycx.2019.11.026
飞机的轨迹稳定性,是指驾驶员仅通过俯仰操纵来控制飞机飞行轨迹(高度)时的闭环稳定性情况[1-2]。轨迹稳定性下降甚至失稳多见于飞机低速飞行状态,如着陆进场、舰载机着舰等,表现为飞机的轨迹变化和操纵期望不相符。研究表明,轨迹不稳定时飞机处于阻力曲线“背区”,即第二平飞范围[3-4],进入违反驾驶员常规操纵习惯的反操纵区,不利于驾驶员精准控制飞机的姿态和速度,威胁飞行安全。
目前对产生轨迹稳定性问题原因的研究丰富且成熟,主要集中于通过控制手段规避轨迹稳定性下降甚至失稳带来的问题,尤其是以小速度着舰、轨迹稳定性问题突出的舰载机。1948年,美国海军最早提出了通过建立动力补偿系统( Approach Power Compensation System,APCS)实现全自动着舰(Automatic Carrier Landing System,ACLS)的构想,经过多年发展已经形成了成熟的舰载机自动着舰技术,并在F/A-18上得到成功应用[5-8]。但对于航母发展仍处于起步阶段的中国,舰载机进近着舰时的轨迹稳定性和轨迹控制仍需深入研究。
本文以前人研究为基础,首先介绍轨迹稳定性的成因和判据,其次采用迎角恒定的动力补偿系统控制系统(APCS)建立舰载机着舰时的轨迹角控制方案,结果表明,采用APCS控制,可以实现在轨迹不稳定情况下的轨迹角控制。
1 轨迹稳定性概述
早期人们根据平飞需用推力曲线来判断是否具有轨迹稳定性。如图1所示,在第二平飞范围,飞机阻力随速度减小而增大。当驾驶员意图使飞机抬头而进行拉杆动作,同时油门杆不动,在短时间内飞机会抬头减速,轨迹向上;此时阻力因速度减小而增大,又得不到更多的推力来平衡,飞机最终因阻力增大、剩余功率不足而下降。这种拉杆—减速轨迹向下轨迹角减小的运动,就是轨迹不稳定现象。
根据控制理论,轨迹稳定性由高度(或轨迹角)对升降舵传递函数最靠近原点的零点决定。当这一零点在虚轴右侧时,不具有轨迹稳定性。为了便于对轨迹稳定性进行飞行试验验证,往往也用轨迹角对空速的变化率dyldV进行衡量[9],并作为轨迹稳定性的判据。该参数可根据轨迹角和速度对升降舵的传递函数得到:
这样就建立了轨迹稳定性和极曲线的关系,如图2所示。以最大升阻比为界,分为轨迹稳定和不稳定两个区域。
轨迹稳定性属飞机飞行品质的一部分,对此军、民用飞机有着不同的要求。根据MIL-F-8785C,对于着陆进场飞行阶段,以正常进场下滑所要求的推力状态,要求dyldV在最小使用速度VOmi。处为负值或小于下列值的正值:标准1为0.032°/( km/h)、标准2为0.080°/( km/h)、标准1为0.13°/(km/h)。且要求dyldV在VOmin - lO krrr/h速度处,比VOmin处在正值方向应不大于0.027°/( km/h),如图3所示。简要而言,军机允许轨迹不稳定现象的存在,但不得“过于不稳”,也不得下降过快。
民用飞机适航规章对轨迹稳定性的要求隐含在CCAR-25.173、175条款[1O]中,其以杆力一速度曲线的形式,包含了对轨迹稳定性的规定。具体而言,条款中首先要求杆力一速度曲线必须具有稳定的正斜率,表明不允许轨迹不稳定;其次规定了最小杆力一速度曲线斜率,进一步对轨迹稳定性裕度提出了要求。
2 轨迹稳定性现象分析
本文取F/A-18着舰时的典型状态,线性模型如下,可以通过上述判据判断其是否具有轨迹稳定性:
参数dyldV为正,表明不具备轨迹稳定性。建立仿真模型,并单独激励以升降舵阶跃信号,油门不变,各状态量的时域响应如图4 (a)所示。可见飞机抬头,速度减小,轨迹角先为正后变负,高度先升后降,与预期的操纵期望相反。单独激励以油门阶跃信号的仿真曲线如图4(b)所示,可见在增油门时,速度并没有显著增加,但产生了显著的爬升。对比升降舵和油门的操纵结果,其区别在于,两种情况下轨迹角y对姿态角θ的跟踪能力不同。显然在升降舵操纵时,轨迹角y不能准确跟踪姿态角θ。相较而言,油门操纵对于改變轨迹,更符合期望的操纵效果,这也与常规依靠升降舵改变飞行轨迹的认识相反。
为了分析轨迹稳定性主要受哪些参数主导,对其进行参数灵敏度分析。这里定义轨迹稳定性对应的零点的参数灵敏
3 轨迹不稳定下的轨迹角控制
针对舰载机的轨迹角控制,早期由飞行员手动操纵,为飞行员带来了巨大的驾驶负担,后来发展出基于速度恒定的功率补偿系统,但由于阻尼弱、超调大,其应用受到限制。其后基于迎角恒定的功率补偿系统则被广泛使用,其控制思路是通过油门对轨迹更好的操纵能力,使轨迹角准确跟踪姿态角,从而实现或保持舰载机的下滑姿态。迎角恒定的APCS的控制律结构如图5所示,控制框图该控制系统在油门通道加入迎角、法向过载和俯仰角速度的反馈,意在通过油门保持迎角不变,并改善油门通道的响应特性。
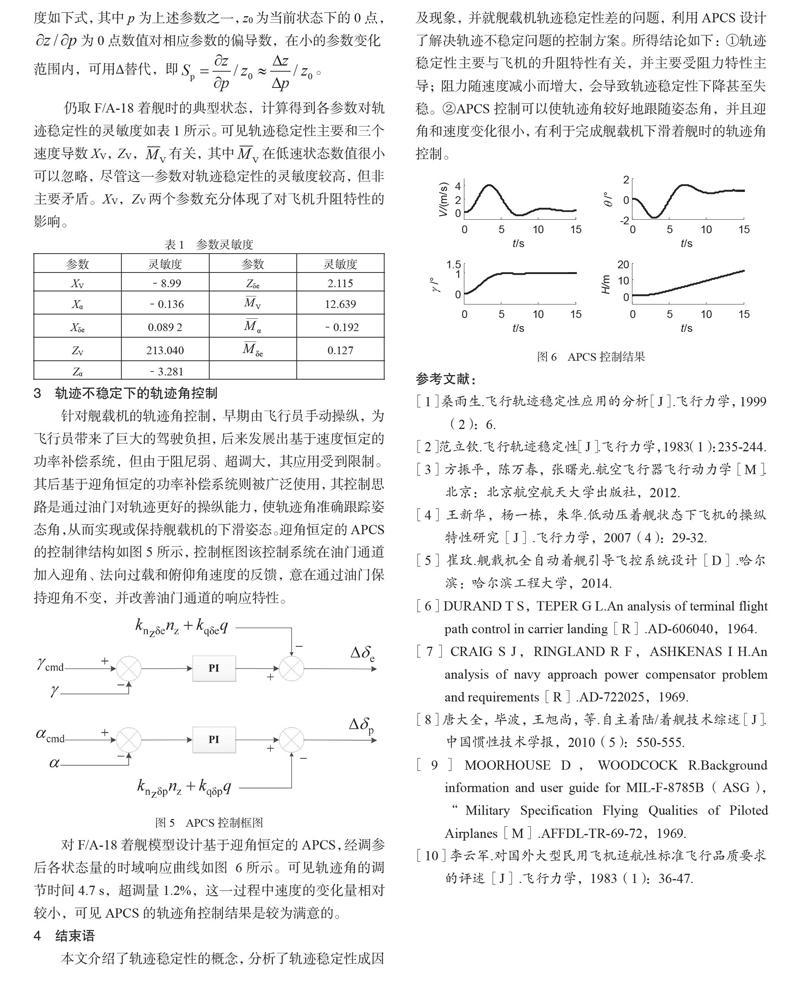
对F/A-18着舰模型设计基于迎角恒定的APCS,经调参后各状态量的时域响应曲线如图6所示。可见轨迹角的调节时间4.7 s,超调量1.2%,这一过程中速度的变化量相对较小,可见APCS的轨迹角控制结果是较为满意的。
4 结束语
本文介绍了轨迹稳定性的概念,分析了轨迹稳定性成因及现象,并就舰载机轨迹稳定性差的问题,利用APCS设计了解决轨迹不稳定问题的控制方案。所得结论如下:①轨迹稳定性主要与飞机的升阻特性有关,并主要受阻力特性主导;阻力随速度减小而增大,会导致轨迹稳定性下降甚至失稳。②APCS控制可以使轨迹角较好地跟随姿态角,并且迎角和速度变化很小,有利于完成艦载机下滑着舰时的轨迹角控制。
参考文献:
[l]桑雨生.飞行轨迹稳定性应用的分析[J].飞行力学,1999(2):6.
[2]范立钦.飞行轨迹稳定性[J].飞行力学,1983(1):235-244.
[3]方振平,陈万春,张曙光.航空飞行器飞行动力学[M】北京:北京航空航天大学出版社,2012.
[4]王新华,杨一栋,朱华.低动压着舰状态下飞机的操纵特性研究[J].飞行力学,2007 (4): 29-32.
[5]崔玫.舰载机全自动着舰引导飞控系统设计[D].哈尔滨:哈尔滨工程大学,2014.
[6] DURAND T S,TEPER G L.An analysis of terminal fligtpath control in carrier landing[R].AD-606040,
1964.
[7] CRAIG S J,RINGLAND R F,ASHKENAS I H.Ananalysis of navy approach power compensator problemand requirements[R].AD-722025, 1969.
[8]唐大全,毕波,王旭尚,等.自主着陆/着舰技术综述[J]中国惯性技术学报,2010(5):550-555.
[9] MOORHOUSE D, WOODCOCK R.Backgroundinformation and user guide for MIL-F-8785B( ASG),“Military Specification Flying Qualities of PilotedAirplanes[M].AFFDL-TR-69-72, 1969.
[10]李云军.对国外大型民用飞机适航性标准飞行品质要求的评述[J].飞行力学.1983(1):36-47.
