电力系统故障对水轮发电机组转子-轴承系统稳定性影响分析
2019-09-05马震岳
温 倩,马震岳
(大连理工大学 建设工程学部 水利工程学院, 辽宁 大连 116024)
电力系统运行随着电力互联网络规模的增大而愈来愈复杂。造成电力系统无法平稳运行的因素也越来越多。对于电力系统平稳运行状态的概念,指在同步转速运行时,系统中的发电机以恒定的电压和功率向负荷供电。电力系统的稳定性即为当系统处于某平稳运行状态时,电力系统遭受干扰,系统能否返回到先前的平稳状态或过渡到新的平稳运行状态[1]。如果能够,则认为系统在该运行状态下稳定;反之,则说明系统是不稳定的[1]。作为电力系统稳定性的一种,暂态稳定性是指当电力系统在某个平稳状态下运行时,遇到较大的干扰,能够通过一段时间的过渡过程而返回到原有的运行状态或达到新的平稳运行状态[2]。
常见的大干扰主要分为以下几种:(1) 除去或增加发电机、变压器、线路等元件;(2) 负荷突然增加或减少;(3) 发生短路故障。在上述干扰中,短路故障的影响最为严重,故其可以作为检验系统是否稳定的重要条件之一。
随着水电站在电网运行中的投入日益加大,其承担了越来越重的调峰调频任务。水电站水机电整体的动态特性对于电力系统安全稳定运行的影响也不断增大[3]。与此同时,电网中电压和功率的异常波动也会对发电机组的正常运行产生影响,造成机组的振荡。由于水电站装机容量的不断增大,机组的重量及其作用在水电站厂房上的力也愈来愈大,机组的振动也会引起厂房结构的振动,对其安全造成影响[4]。而作为一个由水力系统、机械系统及电磁系统三大子系统组成的非线性动力强耦联系统,水电站水机电耦联系统的动态特性受各子系统综合作用和影响[5-6]。
目前各子系统在其各自领域研究都已较为成熟,但各个系统的计算方式相差迥异,跨越的知识体系较广。此外随着水电站实际运行过程中不断出现多系统耦合特性,建立一个较为完善的水机电耦合系统模型具有重要意义。
本文以水电站水机电耦联系统为研究对象,通过MATLAB/SIMULINK建立起包含水轮机及调速器系统、发电机系统、励磁系统等构成的水机电耦联仿真模型,并利用MATLAB语言编程建立起水轮发电机组转子-轴承系统的运动微分方程。水电站水机电耦联系统基本结构如图1所示。

图1水电站水机电耦联系统基本结构图
作为一个复杂的大规模时变系统,电力系统发生的负荷剧烈变化、故障都具有较强的随机性,在这些过程中,电能的质量将发生很大的变化。在电力系统遭受较大的干扰时,系统运行中的各种电磁参数将发生剧烈变化,但由于发电机较大惯性力的作用,短时间内发电机功率不会发生突变,因而发电机转子上的机械转矩和电磁转矩无法继续保持平衡,进而导致不平衡转矩的发生。不平衡转矩会改变发电机的转速,又使得同步发电机的转子位置偏心,即发电机电动势之间的相对角度变化,系统中的电流、电压和电磁功率也会随之而变化[7]。本文针对电力系统受到短路故障干扰时,故障切除时间及故障类型对发电机转子-轴承系统稳定性的影响进行分析。
以往关于水轮发电机组转子-轴承系统振动特性的研究主要关注点在于机组轴系自身参数,如轴承刚度、轴承轴颈间隙、转子质量的偏心等,对正常运行状态下系统的动力学特性的分析[8]。而机组转子-轴承系统是一个复杂的耦联非线性系统,其动力学特性仍然受其他因素影响,如电磁参数、转子转速等。本文通过不平衡磁拉力建立水机电耦联系统与转子-轴承结构系统的耦合,并在求解其运动方程中,对励磁电流和转速进行了时步更新,分析电力系统的短路故障对水轮发电机组转子-轴承系统振动特性的影响。
1 模型建立和解析计算
1.1 水机电耦联模型的建立
对水机电耦联系统进行稳定性分析的时候,各子系统仿真模块的选择直接关系到稳定性分析的准确性和精度。因此,合理选择描述各子系统特性的模型不仅能够满足分析结果的精度要求,还可大大简化计算过程。本文根据电力系统的特征,在MATLAB/Simipower System工具箱中对应选择合适的仿真模块[9],设置合适的参数。
1.1.1 MATLAB/SIMULINK仿真工具
MATLAB[10]是一款以矩阵运算为基础,通过编程与交互环境的集成,实现工程计算、设计控制、图像处理、信号检测、处理与分析、应用程序开发等功能。其中SIMULINK是1990年由Math Works公司研发设计出的实现动态系统建模和仿真的一个平台。SIMULINK[11-12]以MATLAB强大的计算功能为基础,能够快速地建立模型,利用模块框图进行仿真和计算,解决了MATLAB不易解决的非线性、变系数等问题,它能够进行连续系统和离散系统的仿真,也能够进行连续和离散混合系统的动态特性分析,更为直观、方便和灵活。
SIMULINK 4.1版开始包含电力系统模块库(Power System Blockset),该库包含了许多典型的设备模型,例如:电机、电源、基本元件、电力电子等,采用变步长积分法,能够较为精确的进行仿真与分析。
1.1.2 单机无穷大模型
在对电力系统暂态稳定性进行定性分析中,通常在理想状态下采用单机无穷大模型。针对单机无穷大系统[13],做以下假设:(1) 其功率无穷大;(2) 恒定频率、恒定电压。
1.1.3 仿真模型的搭建
利用MATLAB/SIMULINK软件中的电力系统模块库(Power System Blockset),建立如图2所示的系统仿真模型[13]。

图2水机电耦联系统仿真模型
2 水轮发电机组转子-轴承系统的建模
如图3所示[14],定子的圆中心为O,O-xyz为三维直角坐标系,当大轴无振动时中心O与S重合,转子重心为G,e0=SG为转子质量的偏心距,大轴的旋转偏心距为e=OS。
2.1 不平衡磁拉力的计算
综合比较不平衡磁拉力的三种求解方法,其中线性分析方法误差较大,数值分析虽然精度高但计算繁杂,故本文采用非线性解析表达式来描述不平衡磁拉力。表达式如下[15]:

图3水轮发电机组转子-轴承模型
(1)


(2)
式中:ε=e/δ0为相对偏心;δ0为发电机转子不偏心时的平均气隙长度。
2.2 非线性油膜力
本文采用Capone模型[16]对轴承油膜力进行计算,该模型的精确度和收敛性都能较好地满足工程应用和理论研究。具体表达式如下:
(3)
其中

其中



2.3 系统运动微分方程
假定上导轴承、下导轴承与转子间的距离为a,转轴两侧的刚度均为Ke。不考虑转轴的重量以及转子重心回旋体的极惯性矩,由拉格朗日方程可得水轮发电机组转子-轴承系统的运动微分方程:
(4)
式中:m1、m2分别为转子和轴承的质量;c1为转子处阻尼;c2为轴承处阻尼。X1、Y1为转子外圆几何中心位移;X2、Y2为轴承轴颈位移;fx为x方向上的油膜力分量;fy为y方向上的油膜力分量,其表达式见式(3)。
为方便计算和讨论,引入无量纲参数,令
则有
在上述运动微分方程中代入不平衡磁拉力和非线性油膜力,对方程无量纲化处理后得到式(5)。
(5)
3 数值仿真
电力系统运行期间,当相与相或相与地之间出现异常连接时,线路中往往会流过远大于额定值的电流,将严重影响电力系统的运行。三相短路、两相短路、单相对地短路和两相对地短路,是系统短路故障的4种主要类型。
本文假设短路故障发生在系统线路出口,随后同时断开线路两侧开关,以将故障线路切除。本文针对不同的故障类型以及故障切除的时间进行仿真模拟。对于水轮发电机组主轴系统动力学瞬态分析,以往常将不平衡磁拉力以及转子转速设为固定值,而本文在转子-轴承系统动力学分析中,将不平衡磁拉力及转子转速设定为时变参数,利用MATLAB自有函数ODE23t求解系统的运动微分方程。
3.1 计算参数设定

变压器T-1的参数:STN1=360 MV·A,UST1%=14%,kT1=10.5/242;变压器T-2的参数:STN2=360 MV·A,UST2%=14%,kT2=220/110。
线路的参数:l=250 km,UN=220 kV,xl=0.41 Ω/km,rL=0.07 Ω/km,线路的零序电抗是正序电抗的5倍。
运行条件为:U0=115 kV,P0=250 MW。
水轮发电机转子-轴承系统参数为:m1=60 kg,m2=25 kg,c1=1 200 N·S/m,Ke=6.2×106N/m,Rr=60×10-3m,Lr=150×10-3m,δ0=4.5×10-3m,μ=18×10-3H/m,ω=13 rad/s。
3.2 计算结果与分析
3.2.1 故障线路切除时间对机组转子-轴承运动特性的影响
当电力系统遭受大的干扰时,系统各部分会在不同时间段做出不同的反应,主要分为三个阶段,起始阶段:故障干扰后约1 s内,考虑保护动作,如切除故障线路等;中间阶段:随后5 s内,调节系统开始发挥作用;后期:中间阶段过后,电容器和自动切负荷装置运作。本文以单相对地短路故障为例进行研究,设定系统在正常启动运行后1 s时出现单相对地短路故障,并分别在故障出现后的0.1 s、0.3 s及0.5 s时切除故障线路。仿真时间设定为15 s,转子运动轨迹图取前5 s的数据进行绘制。图4为故障后分别在0.1 s、0.3 s及0.5 s切除线路条件下所对应的发电机转速曲线图。图5为不同故障线路切除时间所对应的水轮发电机组转子横向X1方向上的时程运动轨迹图。


图4 故障后不同切除时间下发电机转速曲线图
图5故障后不同切除时间下发电机转子轴心X1方向轨迹图
从图4可以看出,当系统在1 s时出现单相对地短路故障时,发电机转子的转速会发生突变,但转速振动的幅度会随时间而不断减小,系统仍处于一个稳定状态。对应的由图5可知,当系统遇到较大干扰的时候,水轮发电机产生较大的振动,但随着故障线路的及时切除,转子-轴承系统经过一段时间的振动后恢复稳定状态。并且切除故障线路的时间越晚,转子-轴承系统的振动持续时间越久。表1为故障后不同切除时间所对应的发电机转子轴心横向X1方向振动幅度的最大值。

表1 故障后不同切除时间所对应的振幅最大值
由表1可知,切除故障时间越晚,发电机组转子-轴承系统振动幅度的最大值越大,但增加到一定值后就不在继续增大。
图6和图7分别是当故障发生后0.7 s时切除故障线路所对应的发电机转速变化曲线图及水轮发电机组转子在X1方向上的运动轨迹图。


图6 故障后0.7 s切除线路,发电机转速曲线图
图7故障后0.7s切除线路,转子运动轨迹图
图8和图9分别表示故障发生后1 s时切除故障线路所对应的发电机转速变化曲线和发电机组转子运动轨迹图。

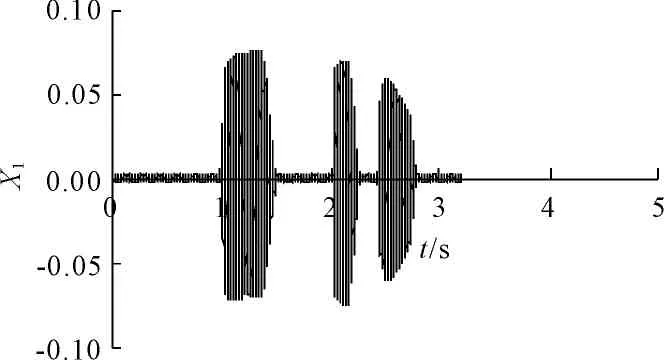
图8 故障后1 s切除线路,发电机转速曲线图
图9故障后1s切除线路,转子运动轨迹图
从图6、图8的模拟曲线可以看出,在故障发生0.7 s和1 s后切除故障线路时,发电机的转速随时间而不断增大,系统处于不稳定状态。而由图7及图9可知,当系统失稳后,发电机转子-轴承系统会发生剧烈的振荡,且振荡持续的时间要大于系统稳定状态下的时间。失稳状态下切除故障线路的时间长短对水轮发电机转子-轴承系统的振动幅度影响并不明显,只会影响振动的持续时间。
3.2.2 故障类型对机组转子-轴承运动特性的影响
分别对上述四种不同类型的短路故障进行仿真模拟,设定系统在正常启动运行后1 s时出现短路故障,仿真时间设置为15 s。经过一定时长的仿真模拟,得到系统临近失稳的时间点。如图10—图13所示,单相接地短路故障情况下,当故障后约0.67 s时,发电机转速变化曲线图中转速的振荡幅度呈逐渐发散状态,故而系统已处于失稳状态。而两相短路、两相接地短路及三相短路条件下,分别对应在故障后约0.63 s、0.22 s及0.20 s出现上述类似状态,系统逐渐趋于失稳。


图10 单相接地短路故障后0.67 s切除线路,发电机转速曲线图
图11两相短路故障后0.63s切除线路,发电机转速曲线图
图14为不同短路故障类型条件下,在故障出现后的0.2 s时切除线路,所对应的水轮发电机组转子-轴承系统轴心运动轨迹图。

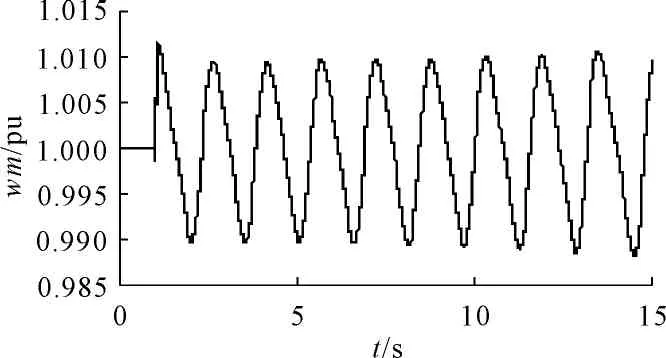
图12 两相接地短路故障后0.22 s切除线路,发电机转速曲线图
图13三相短路故障后0.20s切除线路,发电机转速曲线图

图14不同故障类型下发电机转子轴心X1方向轨迹图
由图14可知,不同的故障类型对水轮发电机组振动持续的时间不同,并且同样是0.20 s后切除故障线路,单相对地短路、两相短路及两相对地短路故障下,系统仍处于稳定状态,水轮发电机组转子的剧烈振动时间约在0.25 s之内,而对于三相短路故障,系统已不再稳定,机组转子出现剧烈振动。单相对地短路、两相短路、两相对地短路及三相短路故障所对应的转子振幅的最大值分别为:0.074 8、0.075 6、0.073 7、0.075 7。由此可知不同的短路故障类型对转子振动幅度的影响也不同,其中三相短路故障的影响最大。
4 结 语
电力系统的稳定性对水轮发电机组振动有着重要影响,当电力系统受到短路故障干扰时,如果能及时切除故障线路,系统仍保持稳定,即经过一段时间后,系统可以恢复到或重新过渡到一个电压、频率等保持稳定的运行状态,那么水轮发电机组转子-轴承系统的振动能够较为迅速地恢复到平稳状态。当故障切除时间较晚,电力系统处于失稳状态时,水轮发电机组会随之产生剧烈振动,剧烈振动持续的时间远大于系统处于稳定状态时的时间。因此快速及时地切除故障线路能够有效避免水轮发电机组持续剧烈振动。短路故障发生后,水轮发电机组转子-轴承系统的振动持续时间以及振幅会随故障切除时间的增大而增大。不同类型的短路故障会对水轮发电机组转子-轴承系统的振动产生不同的影响,其中三相短路故障的影响最为严重。
