北斗定位技术在客船安全监控中的研究与应用
2019-09-03燕鹏飞高玉军张厚保
燕鹏飞,高玉军,张厚保
(1.中国交通通信信息中心,北京 100011;2.山东海事局,青岛 266002)
海上客运的安全性面临着巨大的挑战,依然存在着事故隐患和安全风险叠加、安全监控存有盲区、部分企业主体责任落实不够等问题,这些都对广大旅客游客的生命财产安全以及海上旅游的顺畅发展有着深远的影响。因此,一方面,依赖相关法律法规的不断健全、完善与落实,以规范和约束客运行为;另一方面,通过合适可行的信息技术手段,提高船舶监控中的早预警早发现的能力,也会有效降低客船航行中的重大事故发生的风险。
在船舶航行过程中,主要是综合利用AIS、VTS、CCTV、VHF、GPS、卫星电话等通信手段对船舶实施动态监控。但这些技术手段也各有利弊,如卫星电话费用昂贵,通常只在紧急或重大情况中使用;岸基AIS 信号覆盖范围有限;卫星AIS 信号上报频率太低等。这些都对我国客船航行状况的监控提出了考验。
为此,本文将研究在客运船舶上安装北斗终端后,利用北斗卫星导航系统提升了船舶定位能力,从而进一步保障了船舶的客运安全。并且,通过客船监控系统的建设促进了海事管理部门与客运企业安全信息共享,实现了在客船动态监控、异常行为防控等方面的联防联动,形成发现、核实、反馈的有效闭环管理,推动了企业落实安全生产主体责任,从而构建了客运安全齐抓共管的良好格局。
1 北斗卫星导航系统定位原理
北斗卫星导航系统是我国自主建设、高精度定位的卫星导航系统。随着北斗系统建设和服务能力的发展,相关产品已广泛应用于交通运输、海洋渔业、水文监测、气象预报、测绘地理信息、森林防火、通信时统、电力调度、救灾减灾、应急搜救等领域,逐步渗透到人类社会生产和人们生活的方方面面,为全球经济和社会发展注入新的活力。[1]
北斗系统定位的基本原理是测量出已知位置的卫星到用户接收机之间的距离,然后综合多颗卫星的数据就可知道接收机的具体位置。卫星坐标可以根据星载时钟所记录的时间在卫星星历中查出卫星的坐标,而用户坐标(及用户接收机坐标)则可以通过用户到卫星的距离进行测算,理论上3颗卫星即可。也就是说由于卫星的位置精确可知,我们可得到用户到卫星的距离,再利用三维坐标中的距离公式[2],通过3颗卫星(假设用户到卫星的距离为d1,d2,d3),就可以解出用户的位置坐标,如图1所示。

图1 用户接收机定位关系图
设卫星坐标分别为p1(x1,y1,z1),p2(x2,y2,z2),p3(x3,y3,z3),用户坐标为p(x,y,z),则计算公式如下:



从图1以及上面的公式,可解出用户坐标p(x,y,z),即确定接收机所在的位置,但实际上,接收机在仅接收到3颗卫星的有效信号的情况下只能确定二维坐标。这是因为计算卫星同用户接收机之间的距离的时间点不是绝对一致的,也就是说卫星时间和接收机时间不是统一的,而在远如太空这样的距离,失之毫厘谬以千里是切实的存在。
而解决时间不一致的方法,一是像在卫星上安装原子钟一样,在接收机上也同样安装,但由于原子钟太过昂贵,显然在每台接收机上安装也不切实际。这样就引入了另一种解决方案,通过引入一个标准时间(即钟差)来解决这个问题,但钟差的引入将上述方程式的未知变量增加了一个,显然用三个方程式是无法解出的,所以就需要增加1颗卫星来进行计算。
设卫星到用户的距离为(d1,d2,d3,d4),卫星坐标分别为p1(x1,y1,z1),p2(x2,y2,z2),p3(x3,y3,z3),p4(x4,y4,z4),用户坐标为p(x,y,z),卫星发射信号的时间为(t1,t2,t3,t4),用户接收机当时的时间为t,接收机同原子钟的钟差为△t,光速为c。计算公式如下:




由以上四个方程式,可求出四个未知参数(x,y,z)和△t,即确定了用户的位置。不过在实际上,这个结果也并非是完全准确,因为还存在其他的影响因素,比如虽然接收机的钟差确定了,但卫星虽然使用了原子钟,但实际也可能存在卫星的钟差,以及天气因素等。所以在实际情况中,定位的精度也是一个范围。不过这里主要讨论的是定位原理,所以不对过多的因素进行探讨。
而且,由于北斗导航系统有GEO,IGSO 和MEO 三类卫星构成,三类卫星的可见性和观测误差特性各异,如GEO 和IGSO卫星可见时段长,而GEO 卫星观测值存在明显的周期性多径误差等[3],故提高北斗导航系统定位的精确性也是需要重点研究的内容。
2 常用船舶位置识别系统对比
目前,国内使用的船舶位置识别系统主要有:
(1)VTS:Vessel Traffic Service 的缩写,意为船舶交通服务,是由主管机关实施的、用于提高交通安全和效率以及保护环境的服务。[4]
(2)AIS:Automatic Identification System 的缩写,意为船舶自动识别系统,由岸基(基站)设施和船载设备共同组成,是一种集网络技术、现代通信技术、计算机技术、电子信息显示技术为一体的数字助航系统和设备。[5]
它们具有不同的特点,如表1所示:

表1 不同船舶位置识别系统的特点
从表1可见,不同的定位系统,有不同的优势和劣势,VTS和岸基AIS 延时短,但是覆盖范围有限,特别对于远距离航行的船舶来说,容易形成信号盲区;卫星AIS 可以覆盖全球,但信号延时太长,不能及时的定位船舶当前所处的位置。这些定位系统虽各有优势,但其弱点也很明显,对于船舶航行的安全及监控都很不利。
所以,如果有定位系统,其既能够保证覆盖范围又可以有较小的信号延时,则无疑会对船舶安全的有着很大的提升。而我国自主研发的北斗卫星导航系统,其北斗三号覆盖范围为全球(北斗一号为中国,北斗二号为亚太地区),保证船舶在全球任何水域都可以被监测到;并且其民用信号的频率可以低到1分钟/次,也保证了定位数据传输的及时性。因而,北斗导航系统的覆盖范围和信号频率,使其可以作为很好的船舶位置定位和识别系统加以应用。
3 北斗定位技术在客船安全监控中的应用
从上面的分析可见,一方面在客运船舶远途航行过程中,对实时监控确实有切实的需求或者可称之为痛点;另一方面,北斗卫星导航系统在很大程度上刚好可以解决客船监控的这一痛点。而且,北斗系统的实时动态伪距差分定位精度达到2-4m[6],所以如果在远航客船上加装北斗终端,通过北斗卫星系统将其船位信号及时回传并在软件系统上进行展现,则可消除信号盲区、及时了解船舶当前位置从而大幅提升安全监控能力。
同时,为了促进现代综合交通运输发展,我国也通过制定专项规划等不断推动北斗系统在水路领域的应用。提出要在现有海上安全监管平台中接入北斗系统相关信息,与海事共享数据库融合,拓展智慧海事的感知手段和应用功能。[7]
3.1 客船监控应用北斗定位技术的整体流程设计
将北斗定位技术应用在客运船舶安全监控的过程,总体可以分为两个部分,一是在客船上加装北斗终端,从而通过北斗卫星导航系统获取船舶的船位等信息,二是建设客船监控系统,并从北斗系统获取信号并加以展示及应用。整体示意如图2所示。

图2 客船监控中北斗定位技术应用示意图
基本流程说明如下:
(1)北斗卫星持续发送询问信号。
(2)客运船舶上安装的北斗终端接收到北斗卫星的询问信号后进行相应,发出定位申请。
(3)北斗卫星收到定位申请后将其转给卫星基站,运营中心通过卫星定位原理计算出终端位置后,一方面将位置信息发送到北斗数据中心存储,一方面发送给北斗卫星。
(4)北斗卫星再将定位信息转发给对应客运船舶上的北斗终端,在客船上即可知道当前位置。
(5)客船监控系统从北斗数据中心获取定位信息后,即可知道当前客船的船位情况,并由此进行更多的实际应用。
上述流程为通常情况,在实际应用中,如果想要了解某客船当前的位置,也可以通过北斗卫星导航系统运营中心主动发起消息给北斗卫星,卫星去询问指定北斗终端的位置,获取以后发回给运营中心。
3.2 客船监控系统总体架构
客船监控系统在建设时,需要紧密结合实际需要,并且充分考虑功能使用和技术可行,在设计上遵循分层设计思想进行系统实现并提供对外服务,故可将其总体架构划分为安全系统、网络系统、主机系统、数据资源平台、应用支撑平台和应用系统5个层级,如图3所示。

图3 客船监控系统总体架构
每一层的设计内容及交互关系如下:
(1)安全系统:安全系统主要包括安全技术和安全管理。安全技术分为物理安全、网络安全、主机系统安全、应用安全、数据安全。安全管理主要是建立安全管理机构、制定安全管理制度、进行人员安全管理和系统安全管理及系统运维管理。
(2)网络系统:包括海事内网和互联网,根据实际需要提供不同的网络服务。
(3)主机系统:主要包括主机、存储、操作系统、WEB 服务器。
(4)数据资源平台:主要是针对应用的需要,对应用底层的数据资源进行统一管理和统一规划设计。
(5)应用支撑平台:SOA 运行环境平台,用于提供一系列工具和功能,为本系统提供综合的SOA 运行支撑环境。网络地理信息系统,基于Internet 平台提供基础地图服务。
(6)应用系统:实现客船监控系统的应用需求并提供对外服务。
3.3 北斗定位技术在客船监控系统中的应用实现
客船监控系统从北斗卫星导航系统获取船舶定位数据后,根据标准的船舶自动识别系统协议进行解析,生成应用系统可识别的船位信息,完成数据校验并入库,之后系统进行数据调用并在前台页面展示。
在离岸距离并不非常远的情况下,以某艘客船为例,我们对比采用北斗、岸基AIS、卫星AIS 这三类定位的数据情况。

图4 某近岸航行客船北斗船位航迹图

图5 某近岸航行客船岸基AIS船位航迹图

图6 某近岸航行客船卫星AIS船位航迹图
从图4、图5、图6的航迹图来比较,可以发现在近岸航行的情况下,无论是北斗系统定位还是岸基AIS 定位,都能够很好地获取船位信号进行展示。但是对于卫星AIS 来讲,虽然总体上也能了解船舶的基本航行轨迹,但是从图6可以清晰看到,存在信号间隔时间比较长的情况,这样对于船舶航行安全存在监控空白。故可知北斗系统定位和岸基AIS 定位对于近岸航行船舶的表现更好,也更有利于船舶航行的安全。
再分析远洋航行客船的情况,由于近岸航行情况已经证明卫星AIS 定位存在信号获取问题,故接下来只进行北斗系统定位和岸基AIS 定位两类进行比对。

图7 某远洋航行客船北斗船位航迹图
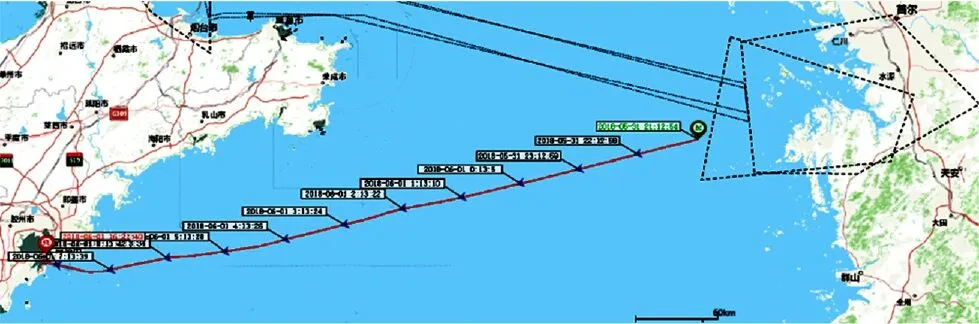
图8 某远洋航行客船岸基AIS船位航迹图
从上述图7、图8的航迹图来比较,可以发现在远洋航行的情况下,北斗系统定位能够覆盖到的范围更大,而岸基AIS 定位覆盖的范围就比较有限,存在覆盖盲区。所以从这方面来比较,北斗系统比岸基AIS 在远洋航行中的表现更好,也更有利于船舶航行的安全。将北斗信号展示的船舶航迹图层放大如图9所示。

图9 某远洋航行客船北斗船位航迹细节图
从图9可见,北斗船位信号的间隔接近1分钟并且间隔时间比较稳定。
从上述近岸及远洋航行的分析可以得出结论:北斗系统定位在客船航行中具备覆盖范围广、信号频率高、信号接收稳定等显著的特点,因而在客运船舶安装北斗终端后,能够明显提升定位效果,从而提高客运船舶航行安全水平。
4 结束语
本文所进行的研究与应用,依托了山东海事局所建设的山东沿海客船动态监控系统,在系统的实现过程中通过对北斗系统定位技术的研究,结合客运船舶航行安全监控发展的现状,探讨并验证了在客船上加装北斗终端后,相比传统定位技术,对船舶定位能力方面的提升效果,证明了北斗系统定位技术在客船航行应用中的可行性和可靠性。但同时,目前北斗星座的卫星发射任务还未完成,距离全球覆盖还需要一点时间,并且相关的法律法规特别是国际上相关的法律支持和推动进展还待继续完善,所以北斗导航系统距离全球化应用还有一些距离,需要更多的支持和努力。另外,在实际中,很多安装北斗终端的船舶,其本身已经具有了AIS 设备,因而在应用系统对航迹显示时,还需要考虑多路船位信号的融合展示问题。