某型飞机驾驶杆力测试系统设计
2019-08-31胡宝权许悦
胡宝权 许悦
摘要:传统的飞机驾驶杆力测试主要通过模拟式仪表来实现,不仅严重依赖操作人员的经验,而且还存在测量精度低、效率差、测量数据得不到有效管理等缺陷。基于此,设计并开发了一套多功能的飞机驾驶杆力测试系统。该系统基于虚拟仪器平台进行开发,具有数据采集、数据分析、数据显示和数据保存等能力,为该型飞机的飞行安全提供了有力保障。
关键词:驾驶杆力;虚拟仪器;测试系统;数据采集
中图分类号:TP277
文献标识码:A
DOI:10.1591 3/j .cnki.kj ycx.2019.08.007
飞机驾驶杆是飞控系统的重要组成部分之一,其横向力和纵向力分别控制飞机的翻滚和俯仰姿态[1]。因此,飞机驾驶杆的稳定性和可靠性直接影响着飞机的飞行安全。飞行员在操纵驾驶杆时,拉杆过大或过猛都有可能导致飞机陷入危险驾驶状态,飞机的杆力实时检测对于驾驶员身体的载荷感应,正确操作驾驶杆控制飞机的飞行姿态,提高飞机的可靠性、安全性等起到了非常重要的作用[2]。
受研制条件限制,某型飞机前期在进行驾驶杆力测试时,使用的是第一代模拟式检测仪表,主要存在以下不足[3]:①采用传统的人工检测方法,测量精度低,误差大;②需要的人员多,对现场操作人员的经验、技术依赖大,且测量结果易受操作人员影响;③无法得到实时的测试曲线,试验数据得不到有效管理,更无法进行试验数据的回放与分析。
针对上述情况,开发了一套先进的飞机驾驶杆力测试系统。该系统基于虚拟仪器平台进行开发,具有数据采集、数据分析、数据显示和数据保存等能力。目前,该系统已成功应用于某型飞机的驾驶杆力测试过程,运行稳定、可靠性良好,为该型飞机的飞行安全提供了有力保障。
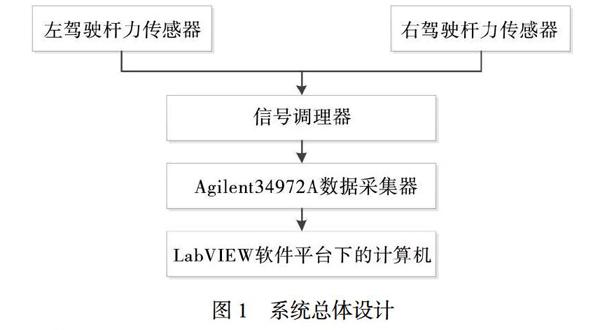
1 系统总体设计
系统总体设计如图1所示。本系统硬件由左驾驶杆力传感器、右驾驶杆力传感器、信号调理器、Agilent34972A数据采集器和LabVIEW软件平台下的计算机等设备组成。首先通过设计的专用工装将左驾驶杆力传感器安装于飞机主驾驶的驾驶杆上,将右驾驶杆力传感器安装于飞机副驾驶的驾驶杆上。驾驶杆力传感器采用电阻应变式传感器,当飞行员操纵飞机驾驶杆时,驾驶杆力传感器将飞机驾驶杆的力值信号转换成毫伏级的电压信号。其次通过信号调理器将传感器输出的毫伏级信号放大到伏级,并进行滤波处理。然后通过Agilent34972A数据采集器将信号调理器输出的模拟电压信号转换成数字信号。最后通过LabVIEW软件平台下的计算机控制采集卡进行数据的采集,并将采集的数据进行分析、处理、显示与存储等各种操作。
2 系统软件设计
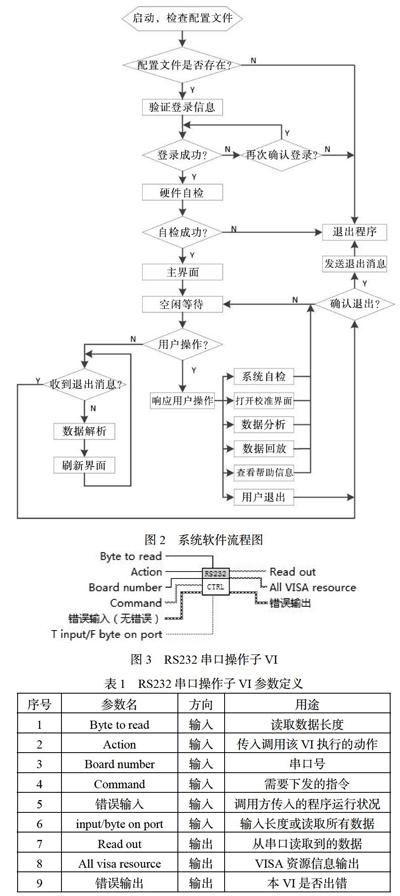
2.1 软件流程设计
系统软件流程如图2所示。软件启动后,首先检查配置文件和数据库是否存在。如果不存在,退出软件并弹出对话框提示用户;如果都存在,软件加载运行时相关资源加载完毕之后,进入登录界面,等待用户输入用户名和密码。用户点击“登录”按钮以后,软件自动在数据库中搜索用户输入的用户名及其对应的密码,如果用户名不存在或密码不匹配,身份验证失败,用户可点击登录界面的“取消”按钮退出程序,也可重新输入正确的用户名和密码再次登录。
用户输入的用户名和密码与数据库中存储的信息一致则身份验证通过,程序执行下一步——硬件自检。硬件如果自检失败,则直接退出程序;如果自检成功,则打开程序主界面。此时如果用户没有进行界面上的操作,系统将驾驶杆力传感器获取的数据解析后显示在主界面相应的控件上。当用户在主界面上进行操作时,响应用户对应的操作,例如系统自检、打开校准界面、数据分析、数据回放、查看帮助信息、退出程序等。
2.2 串口操作模块设计
RS232串口操作子VI如图3所示。本系统数据采集器与计算机之间通过RS232串口进行数据交互。LabVIEW串口操作是最基本的初始化、读、写、关闭操作,直接调用LabVIEW中提供的串口操作函数即可。为了后续操作的方便,将RS232串口操作封装成一个子Ⅵ,后续根据数据读、写操作的不同,调用该子VI完成相应的操作即可。该子Ⅵ输入输出参数定义如表1所示。
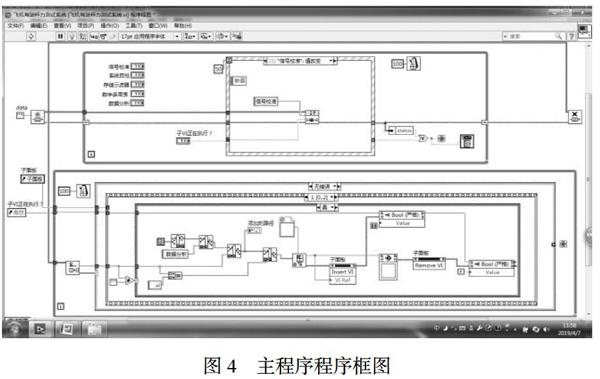
2.3 主程序设计
主程序如图4所示。主程序主要采用状态机结构进行设计,首先设计一个枚举常量,分别赋值初始化、测试操作和退出。程序运行之后,首先进入初始化,对界面的一些控件进行各种原始操作。例如界面上显示的飞机驾驶杆力测试数据在每次试验之前需要设置为0,类似这些操作都可以放在初始化中进行。初始化完成之后,软件自动跳人测试操作帧,在测试操作中,使用了事件结构,当用户没有在界面进行操作时,事件结构进入到超时循环,此时通过调用2.2小节设计的RS232串口操作子Ⅵ,获取Agilent34972A数据采集器采集的数据,解析后显示在主界面相应的控件上。当用户点击主界面上的任意按钮时,超时循环停止执行,程序自动跳入对应的事件结构帧,响应用户的操作。
3 测试系统的应用状况
系统主界面如图5所示,主界面的左侧为用户可以操作的一些控件,共包括系统自检、信号校准、数据分析、数据回放、帮助和退出系统六个按键。其中系统自检可以对系统的硬件进行自检;信号校准主要功能是通过软件算法对输入,输出信号进行校准,解决由线压降、分压电路等原因造成的输入/输出源值与实际值不符的问题;数据分析可以对采集的信号进行时域、频域等分析;数据回放方便客户对试验中保存的数据随时进行数据的回放;帮助按钮可以调用帮助文档,帮助客户正确使用和维护程序;退出系统让整个系统停止工作并退出程序。在主界面的正中间为采集的左、右驾驶杆力实时波形图,也可以通过上方的选项卡进行波形显示和数值显示的切换。
4 结论
本文基于LabVIEW软件平台,结合电阻应变式传感器、信号调理器和Agilent34972A数据采集器、计算机等硬件设备,开发出了一套先进的飞机驾驶杆力测试系统。该系统解决了传统的模拟式飞机驾驶杆力测量方法精度低、效率差、结果易受操作人员影响等不足,具有运行稳定、可靠性良好、测量精度高、功能易扩展等优点,为某型飞机的飞行安全提供了有力保障。
參考文献:
[1]蒋红娜,朱丽,冯铭瑜.飞机驾驶杆(盘)力系统现场测试校准技术研究[J].应用天地,2016,35(5):88-90.
[2]杜天军,黄世超,刘书国,等.某型歼击机驾驶杆力和位移测试校准系统[J].研究与开发,2016,35(12):70-74.
[3]邹亮.飞机操纵系统机械特性测试软件设计[D].南昌:南昌航空大学,2014.
