微纳卫星释放分离参数的测试方法
2019-08-31陈有梅付碧红余成锋吉彦超
陈有梅 付碧红 余成锋 吉彦超
(上海微小卫星工程中心,上海201120)
1 引言
微纳卫星因其体积小、研制周期短等优点已成为航天产业中的重要组成部分。据统计,2017年全球共发射100kg以下的微纳卫星近300颗,占同期入轨航天器总数的67.5%。目前,微纳卫星的发射大都采取搭载或者一箭多星的方式,为保证搭载星不与主星分离时发生干涉或者多星分离时不发生干涉,几乎所有微纳卫星都会根据自己的需求设计自己的分离释放机构[1]。
伴随卫星作为微纳卫星的一种,其分离形式较为少见。该种微纳卫星作为一个有效载荷安装在主航天器上,跟随主航天器一起发射、分离、入轨,跟随主航天器运行一段时间后,适时地从主航天器分离出去,对主航天器的运行状态进行监控和拍照。该种微纳卫星在分离时刻会对主航天器造成一定的冲击,同时由于该微纳卫星是从航天器的内部释放到太空中,所以分离过程中的冲击、姿态和速度等参数至关重要。
本文以天宫二号伴随卫星的分离作为研究测试对象,提出一种地面模拟微纳卫星释放分离测试方法,对卫星分离过程中的姿态、速度及双方的冲击响应进行测量。
2 释放分离试验方法及参数测量
2.1 地面模拟释放分离试验方法
卫星释放分离试验中,有多种模拟方法[2],本文所采用的模拟方法是将主航天器等效为固定端,用高精度试验架模拟,微纳卫星连同释放机构通过连接支架与试验架连接。为了在后面的数据处理中能够快速消除重力加速度带来的影响,卫星分离速度方向指向地面。为防止对卫星模拟件造成不必要的损坏,在卫星的正下方及侧边均放置较厚的缓冲垫。
使用计算机对释放机构发出分离指令,分离释放机构解锁,释放弹簧装置和重力加速度共同引起微纳卫星向下运动,实现卫星与释放机构的分离。卫星整个分离过程中在弹簧力[1]和重力的共同作用下向下作加速运动,随着弹簧压紧力的逐渐释放微纳卫星运动的加速度逐渐减小,在弹簧力作用结束后,微纳卫星将以自由下降的方式落在保护垫上。试验方案原理示意图如图1所示,实际试验系统TG-2伴随卫星释放前试验状态如图2所示。
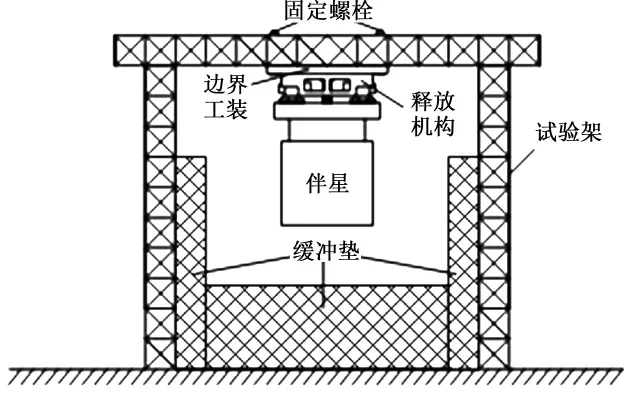
图1 释放分离方案原理示意图Fig.1 Schematic diagram of releasing experiment
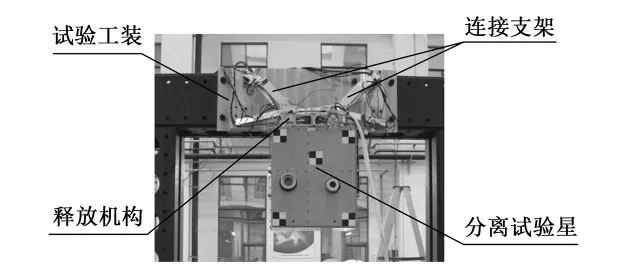
图2 释放分离试验图Fig.2 Photo of releasing experiment
2.2 卫星释放参数测量
2.2.1 卫星释放速度的计算与测量
卫星解锁后的释放动力由一对弹簧装置提供,根据弹簧特性计算可得卫星在整个释放过程中弹簧所释放的弹性势能。在卫星释放过程中,由于时间很短,根据能量守恒原理,几乎所有弹性势能均转化为卫星的动能。将卫星质量代入即可获取卫星理论释放速度。
卫星释放速度的测量过程采用每秒1000帧的高速摄影机记录。将高速相机获取的时间数据ti(ms)为自变量,位移数据xi(mm)为因变量,拟合卫星的运动过程。将获取的位移曲线函数对时间进行一次微分即可获取分离过程的速度函数。
试验采用的弹簧测试数据见表1。分离试验星的质量为47.5kg,质心分布和惯量特性与发射星一致。计算可知一对弹簧在规定行程内释放的能量W=5.778N·m,考虑释放前后弹簧的弹性势能全部转化为卫星的动能,可以计算出卫星的理论释放速度为vTh=0.4932m/s。
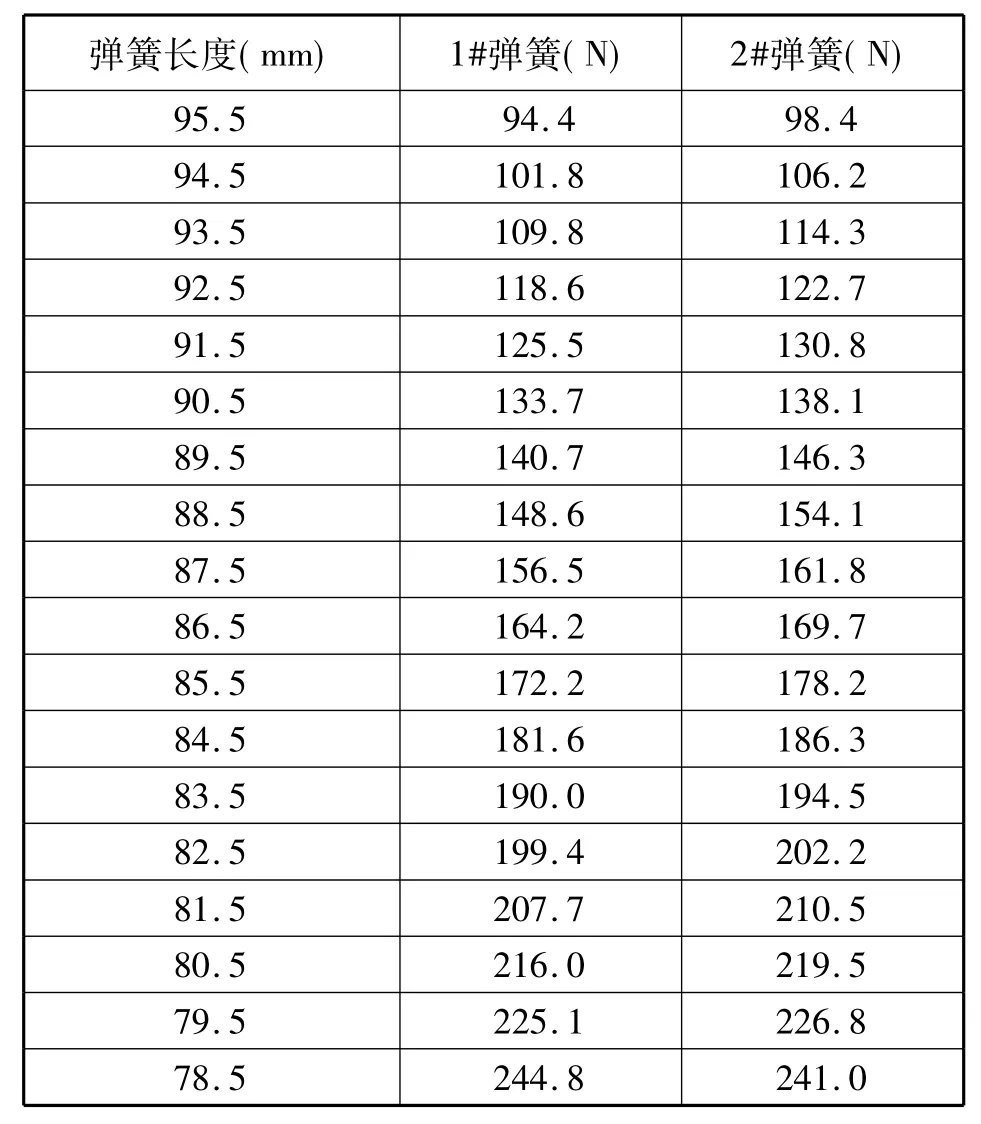
表1 分离弹簧测试数据Tab.1 Testing data of releasing springs
对高速摄影机获取的卫星释放数据进行三次多项式拟合,曲线表达式如下

式中:S(t)——位移拟合曲线,m;ai——位移拟合系数;t——时间,s。
对得到的位移函数求导得到速度方程,表达式如下

分别对三次拍摄的数据进行拟合,得到的系数(保留4位有效数字)见表2。
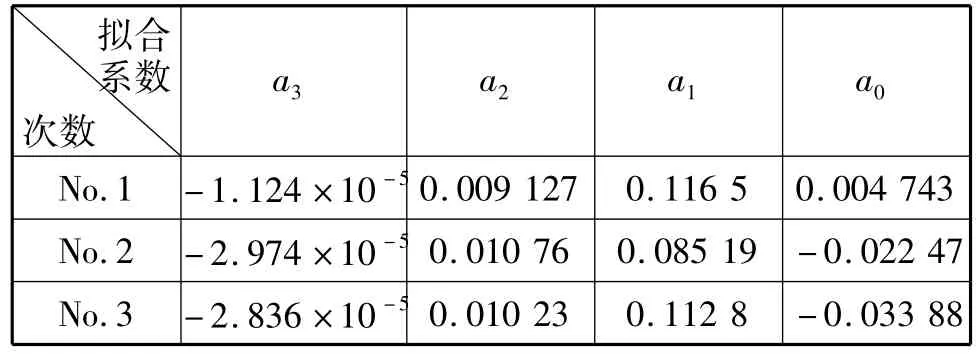
表2 位移拟合系数Tab.2 Factor of distance fitting
整个释放过程中,假定弹簧行程为S(t)=δ,通过拟合曲线的函数式可得卫星分离时刻的时间,进而可得分离时刻的速度。试验分离瞬间卫星的动能减去重力势能即可获取在轨分离时的动能,两个时刻的速度满足如下关系

式中:vob——试验在轨分离时速度,m/s;vT——分离瞬间卫星速度,m/s;g——重力加速度,m/s2。
令S(t)=17mm可获取三条拟合曲线所需的时间分别为 38.01ms,37.39ms,37.97ms,获取的三次试验分离速度、经过分析获取的在轨释放速度及与理论释放速度的误差见表3。
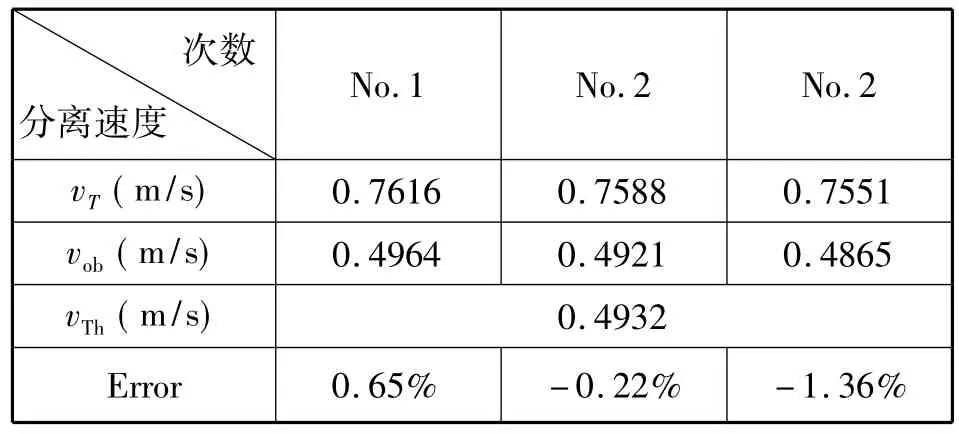
表3 实测分离速度及分析结果Tab.3 Testing releasing speed and calculati ng result
文献[3]中表明,综合试验方法误差、试验场地重力加速度误差、空气阻力误差、高速摄影误差及安装偏差,误差值应在1.5%以内。本文速度测试结果满足误差要求。
2.2.2 卫星释放姿态的测量
释放姿态和星上单机测量系统如图3所示。试验设备包括蓄电池组、微机械陀螺、光纤陀螺、冲击传感器、数据采集存储器。由于卫星释放分离时外部线缆的干扰会影响姿态的稳定,星上的采集系统与外界没有任何连接,而是通过安装在试验星内的蓄电池给三轴陀螺、数据采集器提供电源。数据采集存储器主要是完成高精度陀螺和冲击传感器信号采集和存储,外部可以采用USB接口回放和复制数据,通过数据分析得到分离角速度和冲击加速度。
本次试验选用3台光纤陀螺,3台陀螺分别与卫星的三个坐标轴平行安装,通过星内电池给三台陀螺供电,并通过陀螺自带的串口将其测量得到的数据记录在数据采集存储器中,本次试验采用的光纤陀螺的测量精度为0.001°/s。

图3 释放姿态和冲击测量系统Fig.3 Testing system of releasing attitude and shock response
三次分离测量试验中均进行了姿态测量,三次陀螺的测试数据如表4所示。第三次分离陀螺的释放姿态测试曲线见图4~图6所示。
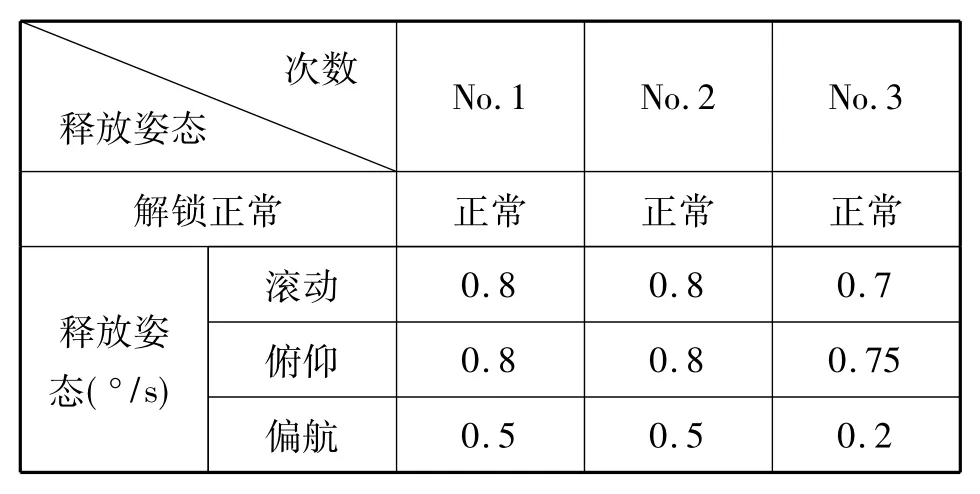
表4 释放姿态测试数据Tab.4 Testing data of releasing attitude
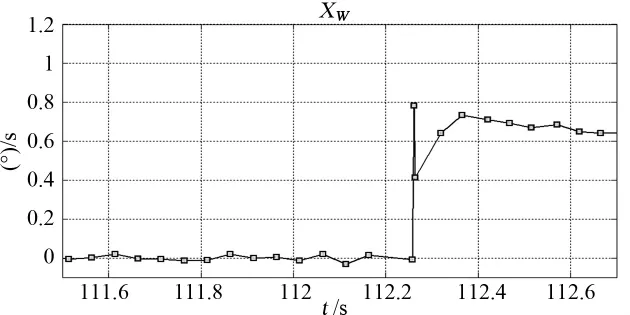
图4 滚动方向释放姿态测试曲线Fig.4 Testing figure of roll rate
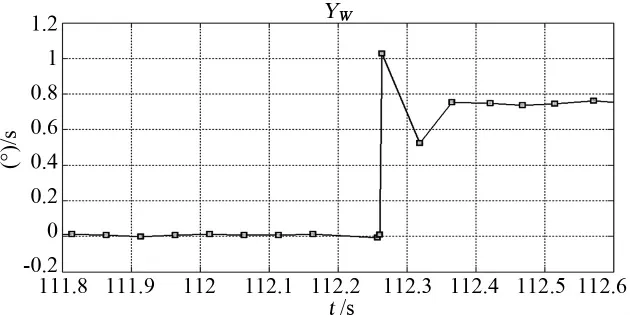
图5 俯仰方向释放姿态测试曲线Fig.5 Testing figure of pitch rate
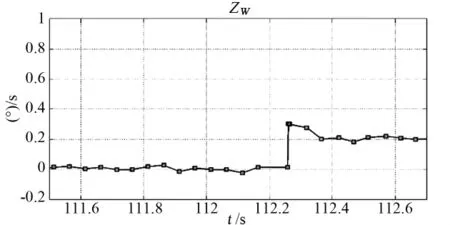
图6 偏航方向释放姿态测试曲线Fig.6 Testing figure of yaw rate
2.2.3 冲击响应的测量
冲击响应主要包括两方面的冲击,对航天器的冲击和对卫星的冲击。对作为固定端的航天器的冲击可以直接通过常规的冲击测量方法直接测出。而对运动的微纳卫星的测量系统采用如图3所示的测试系统。数据采集存储器完成冲击传感器电压信号采集和存储,外部采用USB接口回放和复制数据,通过数据分析得到冲击加速度。
根据传感器电压信号与冲击响应加速度值的关系特性,冲击加速度按下式计算式中:k——冲击传感器灵敏度,g/V;U——传感器电压值,V。

安装在星内的数据采集存储器采集的电压值经过转换变成时域的冲击加速度响应值,再经过傅里叶变换后得到频域的冲击响应值。
三次分离测量试验中对星上冲击均进行了测量,共布置了8个测点,共计24路,表5给出了载荷安装角附近三次的测试冲击响应值,量纲为g。
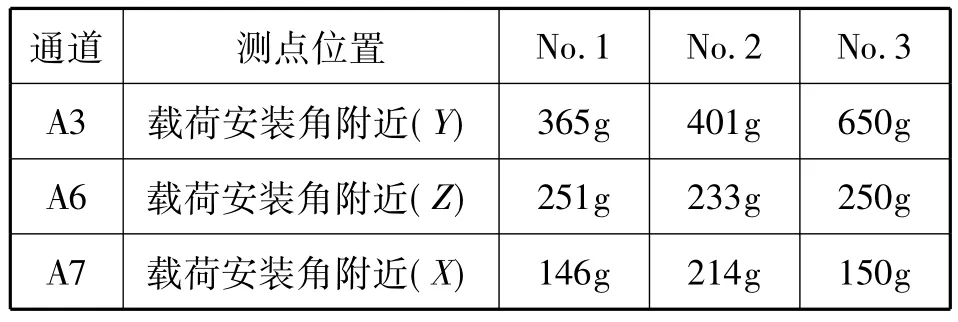
表5 冲击响应Tab.5 Shock response
2.3 在轨数据与试验数据的对比
该型号的微纳卫星随天宫二号航天器发射,入轨后进行了在轨的释放分离,星上仪器设备测得了卫星释放的姿态和释放速度,滚动0.7°/s,误差9.5%;俯仰0.8°/s,误差 -2.1%;偏航0.5°/s,误差20%;释放速度为0.49m/s,误差0.34%。
3 结束语
利用高速摄影、光纤陀螺、冲击传感器以及数据采集器可测出地面模拟微纳卫星在轨释放的释放分离速度、姿态、冲击等释放分离参数。该测试方法排除了地面连接线缆等的干扰,其测试数据与在轨卫星测试的释放速度和姿态数据进行了对比,数据基本一致,说明该方法可行有效,可很好地预估和预知卫星在轨释放的相关参数。
