基于加速度时域-斜率特征的多向行走识别算法
2019-08-29肖明朗郭俊启张泽欣
刘 宇,肖明朗,郭俊启,张 旭,张泽欣,李 瑶,方 针,2
(1.重庆邮电大学 光电信息感测与传输技术重庆市重点实验室,重庆 400065;2.中国电子科技集团公司第二十六研究所,重庆 400060)
0 引言
随着行人对位置的服务(LBS) 需求越来越广泛,行人对室内定位的需求也在不断增加。人体室内定位技术主要包括WIFI定位、超宽带(UWB)定位、惯性定位、射频识别(RFID)定位等[1-4],其中对环境依赖性低且具有自主性优势的惯性定位技术备受关注。由于行人行走模式的复杂性,行走模式的识别精度直接影响到行人多向行走模式下的室内惯性定位效果。多向行走模式识别技术在室内定位中具有重要的应用意义,所以使用惯性传感器采集的运动数据来识别人员行走模式,成为室内定位的一个重要研究方向。
近年来,为了提高行人惯性定位中模式识别的精度,研究人员对行人多向行走模式识别技术进行了大量研究。文献[5]中提出了通过加速度进行步态检测判别人员的前进运动,但并未分析其他方向的运动模式。文献[6]中提出了利用加速度计运动方向轴向的加速度峰值正、负来识别前进和后退,但由于行走时加速度呈周期性变化特征,无论前进或后退都存在正负值,该算法并未提出如何去准确区分不同行走模式下加速度的正、负值。文献[7]中提出的人体多方位航迹推算算法中,通过相位反转法能对行人多向行走进行区分,但其方法需要确定第一次运动时的相位,在行人高频率切换运动模式时,稳定性较低。文献[8]中提出了一种利用静止到运动第一个加速度波形的差异,识别行人的多向行走,但其每一次识别都需要行人先静止一段时间,满足不了实时性要求高的行人定位。
本文提出的基于加速度时域-斜率特征算法的多向行走识别算法,先使用加速度方差对行走模式进行分类,使用步态检测法检测每一类行走模式的峰值或谷值,计算运动方向(x轴或y轴)加速度在z轴峰值或谷值时刻的斜率,最后分析斜率大小获取识别结果。提出的算法能精确识别出行人每个步态的行走模式,包括前进、后退、左移和右移共4个方向的行走模式。
1 算法框架
全文算法通过提取人体加速度时域特征来识别行人行走模式,图1为算法框图。先将惯性测量单元(IMU)中采集到的加速度数据进行预处理——低通滤波;然后通过提取和分析数据时域特征差异,将待识别的行走模式分为前进、后退和左移、右移两类行走模式;最后通过步态检测对z轴加速度进行峰值或谷值检测,计算运动方向(x轴或y轴)加速度在z轴峰值或谷值时刻的斜率,通过分析时域-斜率特征的大小,获得稳定的识别结果。
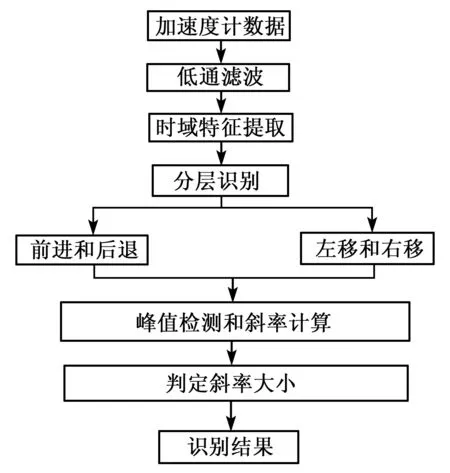
图1 多向行走模式识别算法框图
2 加速度时域特征提取
IMU平台使用的三轴微机电系统(MEMS)加速度传感器能采集多个方向的运动数据,每个轴向都可以获取多种特征参量。坐标系如图2所示,行人将IMU佩戴在腰部,x轴与前进、后退运动方向平行,y轴与左、右横向运动方向平行,z轴与重力方向平行。在不同的运动模式下,通过分析特征参量的差异,从而对不同的运动模式分类。为了保证本文算法的实时性,因此,选取响应时间较短、计算量小的时域信号作为特征参量。
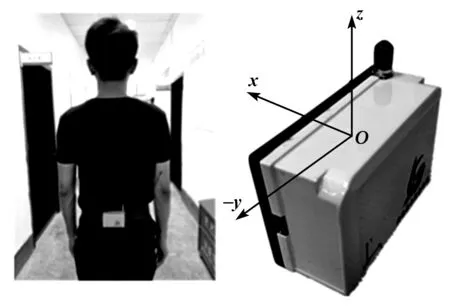
图2 IMU佩戴方式及坐标定义图
方差能反映数据偏离平均值的程度[9],在不同运动模式的切换下,如果运动幅度变大,数据方差也会越来越大。当人体在不同的行走模式下时,加速度传感器每一轴的数据波动均不同。通过分析,使用计算传感器x、y轴数据的方差特征,将待识别的行走模式分为前进、后退和左移、右移两类。方差计算式为
(1)

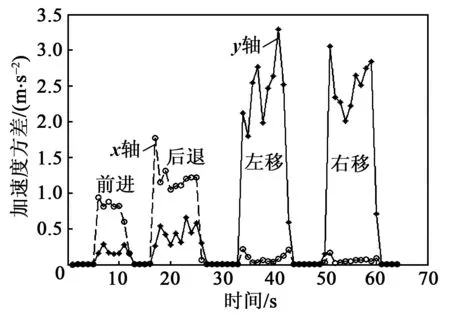
图3 加速度数据时域方差特征图
图3为多种行走模式连续切换下加速度传感器x、y轴数据的方差分布,前进和后退时x轴的方差都大于var1,而左移和右移时x轴方差接近于var2;同时,左移、右移时y轴的方差远大于前进和后退时y轴的方差。由图3可知,通过方差数据特征设定双重阈值,能稳定的将人体行走运动模式分为两类,即前进行走与后退行走(第一类运动)和左移行走与右移行走(第二类运动)。图3的数据处理完全模拟现实的实时行走情况,能充分验证该分层识别算法的有效性。
3 步态检测
加速度传感器原始输出的波形会产生很多峰值现象,易造成峰值检测错误,造成计步误判。
本文通过低通滤波对加速度原始数据进行预处理,在保留其数据特征前提下,尽可能地消除信号中的噪声,使数据曲线更平滑,更易于数据特征的提取。滤波后加速度的数据曲线类似于1个正弦波,行人的每个步态信号都是1个波峰值、1个零点和1个波谷值对应。
不同的行走模式下,加速度数据的幅值和频率不同。本文对加速度传感器z轴数据特征进行分析,采用“幅值+时间”阈值检测法来检测步态[10]。因此,当人体处于第一运动状态时,z轴加速度数据的峰值特征明显,通过检测加速度的波峰值来识别行人的有效跨步。去除阈值小于a1的垂直方向(z轴)加速度的波峰;若相邻2个加速度峰值间的时间间隔小于t1,去除后一个峰值,并存储正确波峰值采样点位置。
当人体处于第二运动状态时,z轴加速度数据的谷值特征明显,可通过为检测谷值来检测行人的有效跨步。去除阈值大于a2的垂直方向加速度的波谷;若相邻2个加速度波谷间的时间间隔小于t2,去除后一个波谷,并存储正确波谷值采样点位置。
图4、5为行人行走时4类运动模式的步态检测。图4中每个峰值标记代表行人前进和后退时的一次有效跨步。图5中每个谷值标记代表行人左移和右移时的一次有效跨步。图中行人的每一步都被标记出来,验证了该步态检测算法的有效性。

图4 z轴加速度数据波形
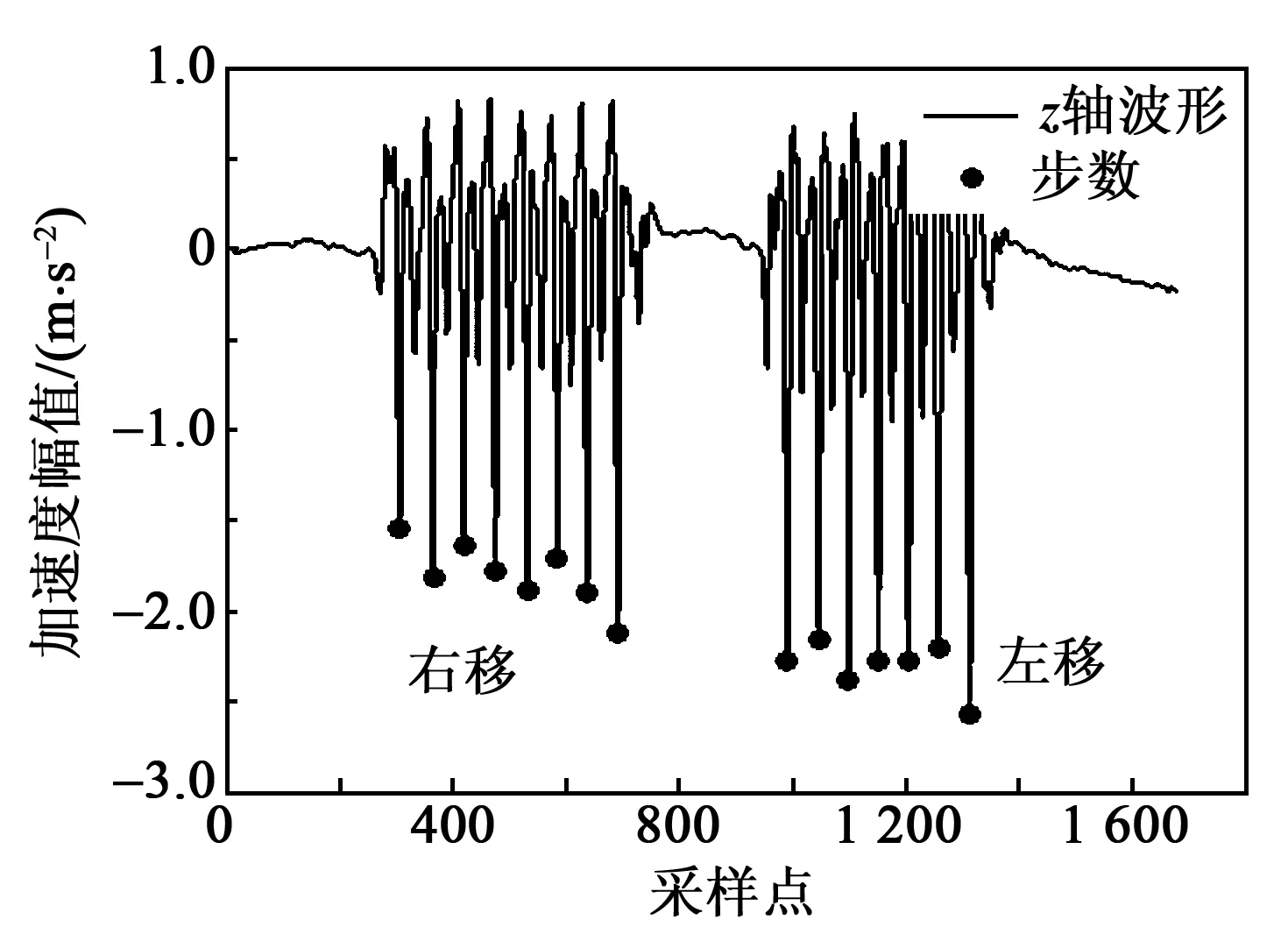
图5 z轴加速度数据波形
4 前进与后退行走识别
研究前进、后退行走模式识别的文献有很多,创造性地提出了结合步态检测和斜率计算算法来识别行人的前进和后退行走。即通过步态检测获取z轴的峰值时刻采样点(每个峰值点也代表行人的一步),同时计算该时刻加速度传感器x轴数据(行走方向)的斜率,通过斜率大小来区分前进和后退行走。当该时刻斜率小于0时,识别人体该运动模式为前进行走,当斜率大于0时,识别人体该运动模式为后退行走。该算法使用上述步态检测中代表行人有效跨步的波峰值和波谷值,模式识别结果与行人的每一步时效统一,因此具有很高的实时性。斜率能反映波形在一定时间段的升降状态。斜率计算式为
}K=[Ax(m1)-Ax(m1-1)]×
[Ax(m1+1)-Ax(m1)]
(2)
式中:K为斜率值;m1为每一步z轴加速度峰值时刻的采样点;Ax(m1-1)、Ax(m1)、Ax(m1+1)分别为m1前一时刻、当前时刻和后一时刻x轴的加速度值。

图6 z轴和x轴加速度数据波形图
图6为前进、后退运动模式时加速度传感器z轴和x轴数据波形的对应关系图。图6中,z轴每个峰值采样点位置都对应同一时刻x轴加速度数据的升降趋势,即每次有效跨步都能检测到行人的行走模式,保证了定位所需的高时效性。图中标记出了行人每前进一步时,x轴加速度都处于下降趋势,其斜率小于0;行人后退一步时,x轴加速度都为上升趋势,其斜率大于0,因此可验证前进和后退识别算法的有效性。
5 左移和右移行走识别
虽然左、右移行走在行人行走中出现频率较低,但对室内惯性定位有重要影响。通过总结前进和后退行走的研究经验,创造性地提出了通过计算步态检测时存储的谷值采样点时刻,用加速度传感器y轴(行走方向)数据斜率的大小来区分左移行走和右移行走。即当斜率小于0时,识别人体该行走模式为右移行走,当斜率大于0时,识别人体该行走模式为左移行走。
图7为左、右移运动模式时加速度传感器z轴和y轴的数据波形对应关系图。图中z轴加速度每个谷值采样点位置都对应同一时刻y轴加速度数据的升降趋势,即每次有效跨步都能检测到行人的行走模式,保证了定位所需高时效性。图中标记出行人每右移行走1步时,y轴加速度都处于下降趋势,其斜率小于0;行人每左移行走1步时,y轴加速度都为上升趋势,其斜率大于0,因此可以验证左移和右移行走识别算法的有效性。

图7 z轴和y轴加速度数据波形图
6 实验结果与分析
为了验证提出的基于加速度时域-斜率特征算法的多向行走识别算法的优势和通用性,获取更客观的测试结果,共有15人参与实验测试,设计了2组实验进行验证,完成前进、后退、左移和右移4类行走模式。
1) 以第三教学楼1楼作为测试场景,示意图如图8所示。测试人员从O前进行走出发至A,从A倒退行走至B,从B前进行走至O,从O左移行走至C,从C右移行走至O,从O右移行走至D,最后从D右移行走返回出发点O。

图8 第三教学楼1楼测试场景示意图
2) 以第一教学楼2楼作为测试场景,示意图如图9所示。测试人员从O前进行走出发至A,从A有移行走至B,从B左移行走至A,从A后退行走至C,从C右移行走至D,从D左移行走至C,最后从C前进行走返回出发位置O。
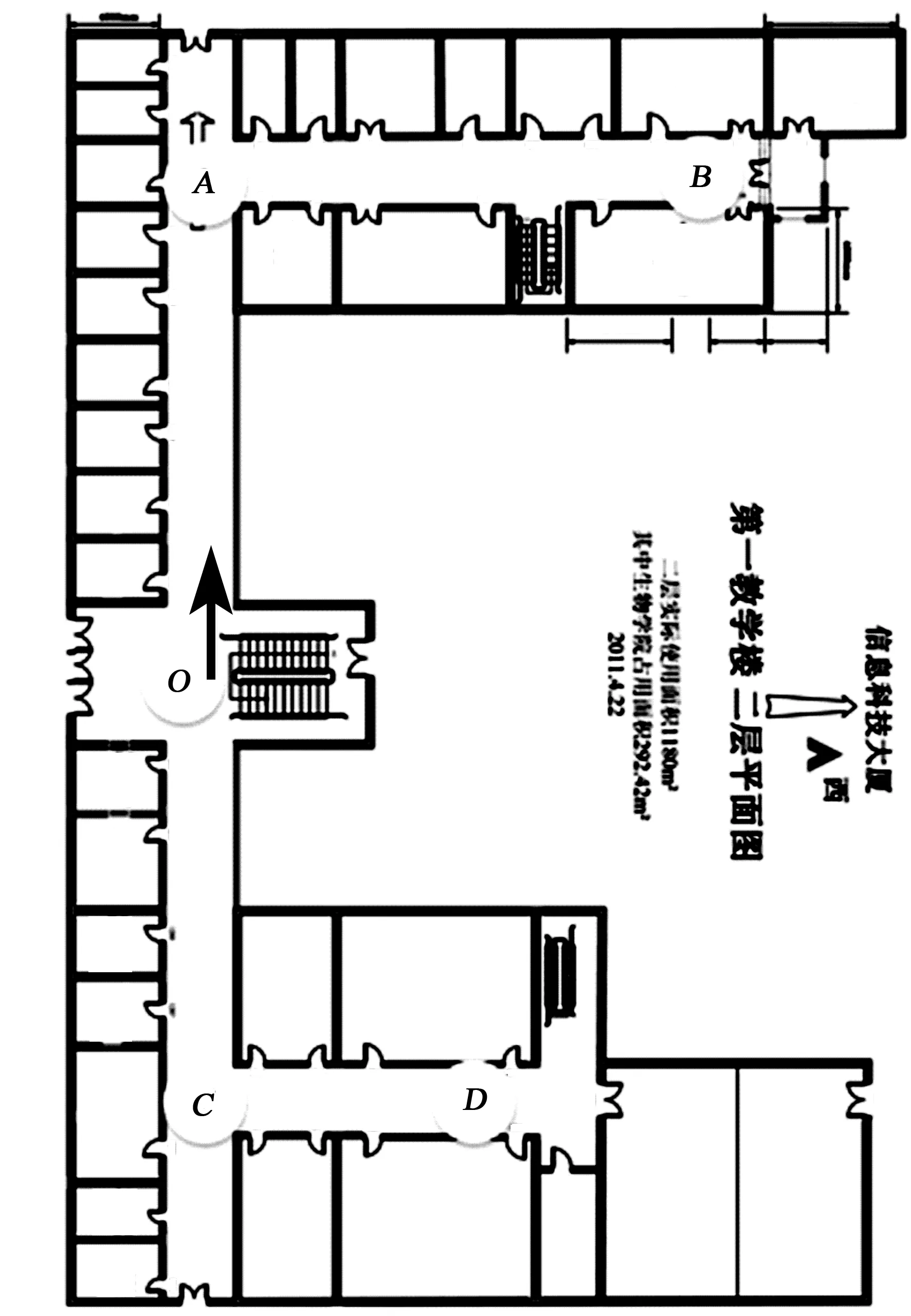
图9 第一教学楼2楼测试场景示意图
记录测试人员每种行走模式下行走的步数用于计算识别率。在实验过程中,对测试人员的行走不做任何限制,按照测试人员的行走习惯完成不同的行走模式。
实验测试在多个集成惯性传感器的IMU平台上进行验证,最终可根据定位平台发出的行人每一步的行走模式标志位作为判定识别类型。识别率可定义为
R=(Stepc/Stept)×100%
(3)
式中:R为识别率;Stepc为正确的识别步数;Stept为实验的总步数。
2组实验统计数据识别率分析结果如10所示。针对不同的行人测试,算法对前进行走的识别率达到100%,后退行走的平均识别率达在98%,对左移和右移行走的平均识别率在95%以上,识别效果较好。
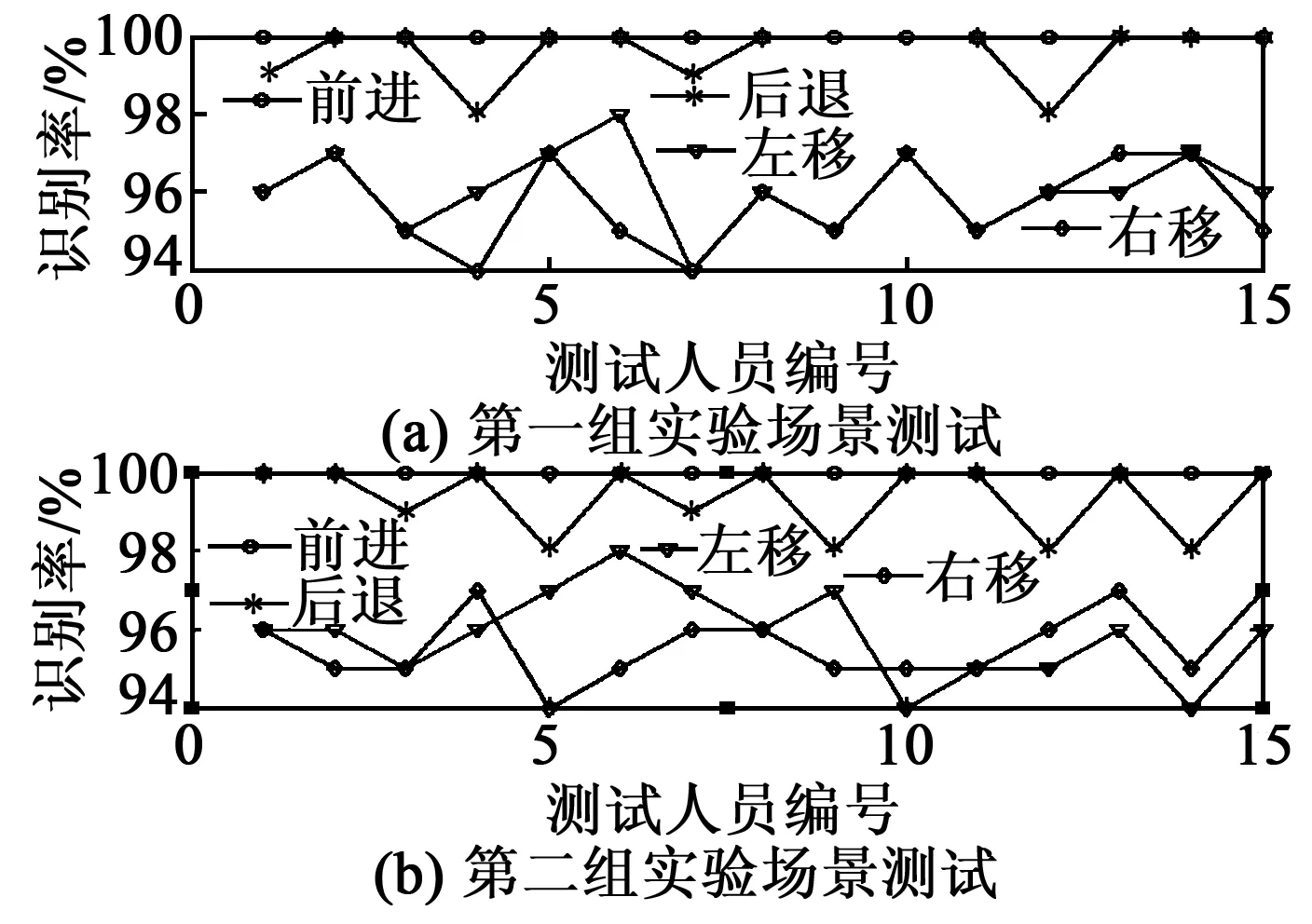
图10 2组实验4种行走模式识别率
7 结束语
通过提取加速度计传感器数据的时域作为算法的特征参量,本文可以识别前进、后退、左移和右移4类行走模式。依照本文思路,后续可实现更多细分模式的识别,如斜向行走等,有利于实现更高的定位精度。在集成多个惯性传感器的IMU系统平台进行测试验证,通过多个场景的测试算法得到识别结果。结果表明,提出的基于加速度时域-斜率特征算法的多向行走识别算法,其平均识别率在96%以上,基本可以满足行人多向行走模式下的室内定位。算法结合文献[7]中的多方位航迹推算算法,可以获得更高的行人室内导航定位精度,具有较高的工程应用价值。