基于CDIO理念的工业机器人虚拟仿真课程教学探索
——以“马鞍型”焊缝焊接仿真为例
2019-08-29宋杰
宋 杰
(潍坊职业学院,山东 潍坊 261041)
0 引言
自2013年起,中国已成为全球第一大工业机器人销售市场。预计未来10年,我国的机器人市场还将持续保持30%以上的高速增长[1-2]。在此形势下,如何培养符合“中国制造2025”要求的技术技能型人才成为高职院校机电一体化、工业机器人专业的首要任务。
CDIO(Conceive Design Implement Operate)是现代工程教育领域新兴的一种先进教育理念,秉承“以学生为中心”的教学宗旨,以完整的工程项目为载体,学生以主动的、实践的、课程之间有机联系的方式,通过构思-设计-实现-运作4个环节,在工程项目研发过程中实现基础知识学习、个人能力提升、团队能力协作及工程研发能力培养。相对于传统的教学模式,CDIO工程教育模式鼓励教师在教学实践中采用多种主动学习和经验学习的方法,以增强对学生的吸引力、提高学生实践操作能力和团队协作能力,并取得了显著的效果[3-4]。
CDIO在高校工业机器人课程中的应用也已展开,内蒙古工业大学工程训练中心通过引入CDIO项目式教学法进行机器人创新实践课程的改革[5]。苏州工业园区职业技术学院将CDIO教学模式应用于工业机器人技术基础课程,得到学校教师与学生的认可[6]。此外,CDIO理念在信息论与编码、电子技术、物联网技术等多个课程领域得到应用。本文以企业调研为基础,借鉴成功的教学案例,进行基于CDIO理念的工业机器人虚拟仿真课程教学研究。
1 工业机器人虚拟仿真技术
为满足人才需要,许多高校(特别是高职院校)开设了工业机器人专业和课程,但是工业机器人系统昂贵,实训设备维护成本高,且数量难以满足实训教学的需要。因此,将虚拟仿真技术应用在工业机器人课程教学中尤为必要。工业机器人虚拟仿真课程是工业机器人技术专业的专业基础课程,具有很强的实际应用性。鉴于高职学生对机器人的认知程度不高、缺乏相应的知识经验,本课程在教学过程中,结合企业调研情况,参照有效的CDIO教学模式,设计、引进企业生产中的机器人应用案例。
因此,这门课程教学设计的基本思路是把知识点、技能点的学习融入具体的工作任务中,以CDIO的模式展开,实现理论与实践结合,以学生关注的点为基础,在传授知识过程中注重工程应用能力培养,强化学生的自学能力与分析,解决问题的能力。本文将以“马鞍型”焊缝的仿真教学为例,具体阐述。
2 “马鞍型”焊缝焊接仿真教学实例
以“马鞍型”焊缝仿真教学项目为例,对上文提出的方案进行说明,并对该项目实施中学生的知识获取和综合能力提升状况进行分析。
2.1 项目设计
管件的相贯焊接形式在高压容器、管道工程中普遍存在,焊缝形式多为复杂的“马鞍型”空间曲线,本节就以“马鞍型”焊缝仿真项目贯穿整个课程教学。
题目:“马鞍型”焊缝焊接仿真
任务:①使用RobotStudio中的三维建模功能进行贯穿管件的建模,获取“马鞍型”空间曲线;②通过轨迹路线的生成、焊接目标点的调整、运动参数修改等,最终“马鞍型”焊缝的轨迹仿真。
要求:根据图1所示流程,使用RobotStudio机器人仿真软件对“马鞍型”焊缝焊接轨迹进行模拟仿真。

图1 “马鞍型”焊缝焊接轨迹模拟仿真流程
所用知识:RobotStudio三维建模、创建仿真工作站、焊接路径生成、目标点调整、轴配置参数、运动参数修改、运动轨迹生成、仿真运行。
2.2 项目实施
根据项目任务,将主项目分解成三维建模和轨迹仿真两个子项目,下面进行详细说明。
子项目1:利用RobotStudio进行三维建模
根据提供的图纸,利用RobotStudio中的建模功能进行模型创建,如图2所示。主要考察学生读图识图能力及RobotStudio中建模功能的掌握情况。
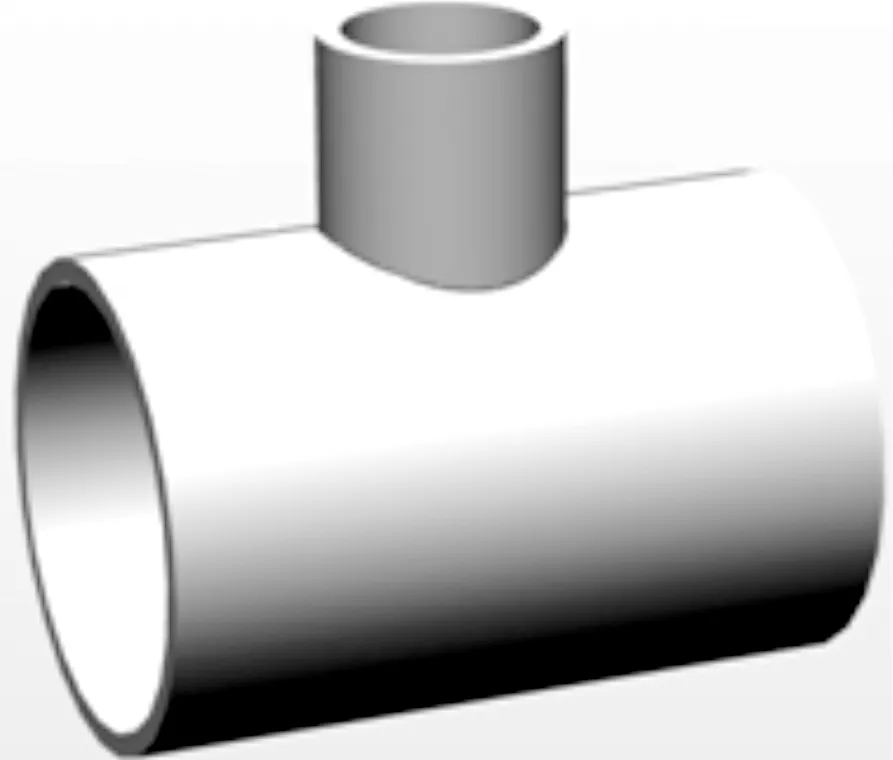
图2 贯穿管件的三维模型
子项目2:焊接轨迹仿真
(1)任务构思。①将贯穿管件相交线提取,作为焊枪运动轨迹曲线,并将此曲线转换为焊枪运动轨迹路径。如图3所示;②对仿真过程中自动生成的目标点姿态进行调整(调整各目标点的X、Y、Z轴),使各目标点均在机器人的可及范围之内;③为达到目标点,机器人可能存在多种关节轴组合情况,因此,需要为自动生成的目标点调整轴配置参数,并通过运动指令,观察机器人运动;④完善程序,仿真运行。为轨迹添加起始接近点、轨迹结束离开点及安全位置HOME点,调整运动的类型、速度、转弯半径等参数,最后进行仿真设定。
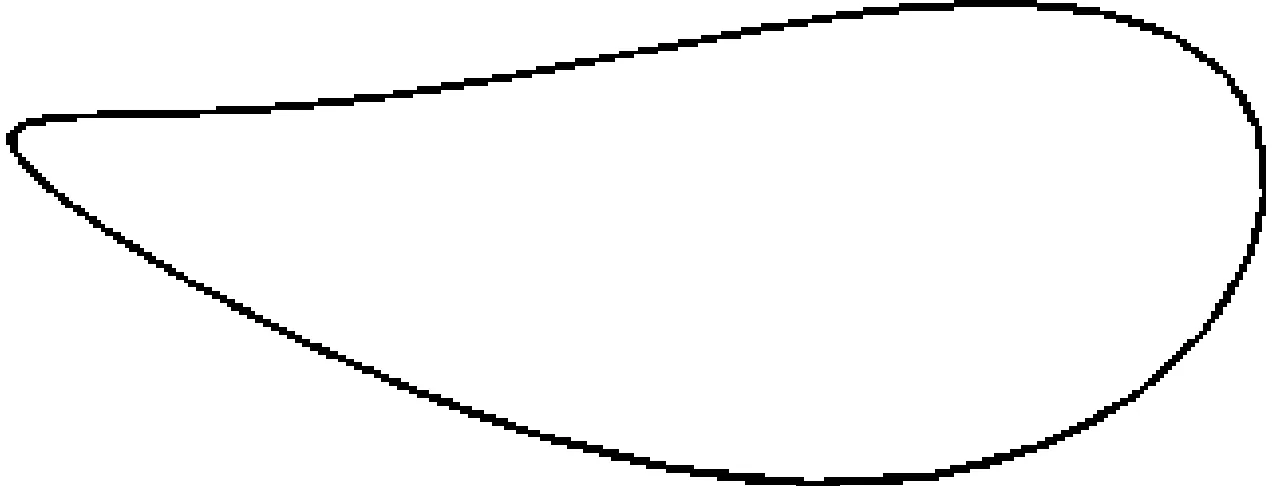
图3 焊枪轨迹曲线路径
(2)方案设计。以小组形式,按照不同目标点姿态调整角度和轴配置参数调整数值进行分工,通过不同小组机器人运动轨迹,让学生理解目标点调整和轴配置参数的原因,掌握调整方法。
(3)任务实现。教师向学生灌输机器人仿真过程中的严谨性与规范性,引导其养成良好的操作习惯,并对仿真过程中出现的问题给予指导。
(4)运作阶段。教师检查学生的仿真结果,并将各小组的结果进行分析,并提出路径最优的发散性问题。
2.3 效果分析
以“马鞍型”焊缝仿真项目为载体,将知识融入实践,相比于之前的教学方法主要在以下两方面得到改善:
(1)“马鞍型”焊缝仿真工作站的创建基于之前所学的RobotStudio建模与工作站的构建,迭代式的学习和实践有助于加深学生对所学知识的理解和运用,进一步掌握基本理论和方法。
(2)以工程项目为载体,结合具体的工程背景进行项目设计与实施,有助于学生从理论走到实践,积累书本上难得的工程知识和项目经验。
(3)构思-设计-实施-运作的CDIO四阶段知识学习和实践应用,有助于提高学生的综合素质,以学生为主体,教师为主导,充分调动学生主动性,提升自主学习能力,锻炼思维能力、沟通能力与操作能力。
3 结语
将CDIO理念引入工业机器人虚拟仿真教学课程,以工程项目为载体,既提高了学生学习主动性,锻炼了思维能力、沟通能力、操作能力,又有效解决了传统教学模式与实际生产企业用人脱节问题,让学生从理论走到实践。CDIO教学模式的应用,在理论教学与实践教学的有机结合等问题上进行了有益探索,做法与经验可供以后参考。