多工作模式压电直线电机的设计与研究*
2019-08-28孙梦馨黄卫清
孙梦馨, 黄卫清, 王 寅, 冯 勇, 张 敏
(1.南京工程学院机械工程学院 南京,211167) (2.南京航空航天大学机械结构力学及控制国家重点实验室 南京,210016) (3.广州大学机械与电气工程学院 广州,510000) (4.华侨大学精密仪器研究中心 厦门,361021)
引 言
作为光通信工程中的关键环节,光波导封装技术对工艺设备提出了较高的精度以及效率要求[1]。为了完成光波导精准对接,实现封装过程的自动化,压电作动器以其定位精度高、响应速度快、消耗能量低及设计制造方便等优点成为了研究与实用的热点[2-6]。叠层压电陶瓷作为主要驱动元件的非共振式压电电机,相比于传统的单片压电陶瓷作为驱动元件的共振式压电电机,具有工作状态不易受环境影响、速度特性曲线线性度高及驱动控制电路设计方便等优点[7-10],更适合运用于精准对接。
近年来,国内外学者提出了许多不同类型的压电作动器,各有优点,然而大多存在难以同时实现高精度与大行程的问题。部分已有作动器通过采用压电陶瓷直接驱动式或者设计柔性铰链来转换位移输出的方式,实现机构作动原理或提高精度,然而受到作动器工作范围和柔铰位移输出的限制,无法实现大行程[11-12]。为了实现大行程,需要在结构和控制上采用更为复杂的系统,或是直接采用宏微相结合的方式,这导致了结构的加工困难,也给控制系统带来了更大的技术难题[13-15]。本课题组提出了一种三相驱动交替步进压电直线电机,设计电机结构并从理论和实验方面研究了三相方波三角波信号与四相正弦波信号驱动下电机的输出性能,电机性能相较之前获得了提升。然而该种电机体积较大,装配较为困难,虽然可以实现大行程却并未对电机精度进行进一步探索[16]。
在已有研究的基础上,笔者提出了一种具有3种工作模式的非共振式压电直线电机,其核心部件定子结构采用双驱动足对称布置结构。这3种工作模式以输入信号的形式以及电机的输出性能来加以区分,各有优势。该种电机能有效实现电机运动的大行程与高精度的结合,适用于多种工作需求。
1 电机结构与机理
1.1 电机结构
图1为非共振式压电直线电机的结构图。该电机是由包含4个叠层压电陶瓷的双驱动足定子、预压力机构、夹持机构和动子组成。这些机构均安装在基座上,定子作为电机的核心部件,安装在夹持机构中,并由预压力机构提供确保其与动子导轨紧密接触的初始预压力,输出部件动子布置在基座上,与定子的双驱动足保持接触状态。

图1 电机结构Fig.1 Structure of the motor
1.2 工作机理
根据系统输入信号以及输出特性的不同,该电机主要分为3种工作模式:连续作动模式、交替步进作动模式和单步作动模式。传统的驱动信号为如图2所示的四路相位差依次相差90°的正弦波电压信号。
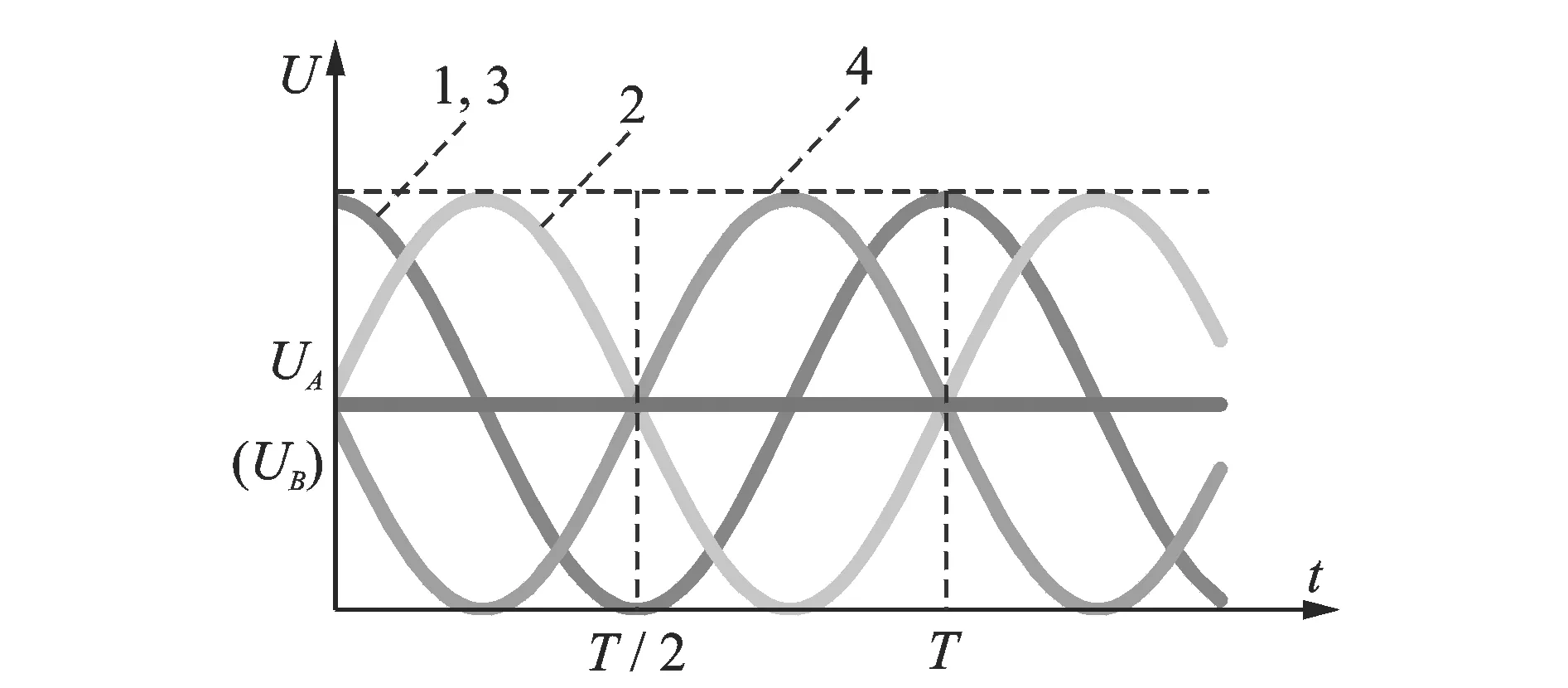
图2 四路正弦波驱动信号Fig.2 Sequence diagram of the driving voltage (sine waves)
分别在叠层压电陶瓷1,2,3,4上施加相应的电压信号,可以实现电机的连续作动。该信号可以表示为
(1)
其中:ω为输入信号的频率;UA,UB分别为x和y方向电压的最大值。
叠层压电陶瓷在输入电压为U0时,其输出位移D0可表示为
D0=nd33U0
(2)
其中:n为叠层压电陶瓷的压电片层数;d33为叠层压电陶瓷所用方向的压电常数。
该输出位移可使驱动足获得位移
D=βD0
(3)
其中:β为结构比例系数。
在理想情况下分析电机系统的运动情况,即双足始终处于一足接触动子,另一足完全脱离动子的状态。此时,双足的运动轨迹均为椭圆,通过摩擦力驱动动子导轨做直线运动。此时,动子的运动位移可以表示为
x(t)=
(4)
其中:运算符[X]表示对变量X取整,相应的速度为
(5)
一个周期内定子双足的平均推力也可计算得到
(6)
其中:μ为驱动足与动子间的静摩擦因数;p为定子系统受到的初始预压力。
图3为两路方波两路三角波(其中两路三角波相同)的驱动信号,分别在叠层压电陶瓷1,2,3,4上施加相应的电压信号,可以实现电机的交替步进作动。
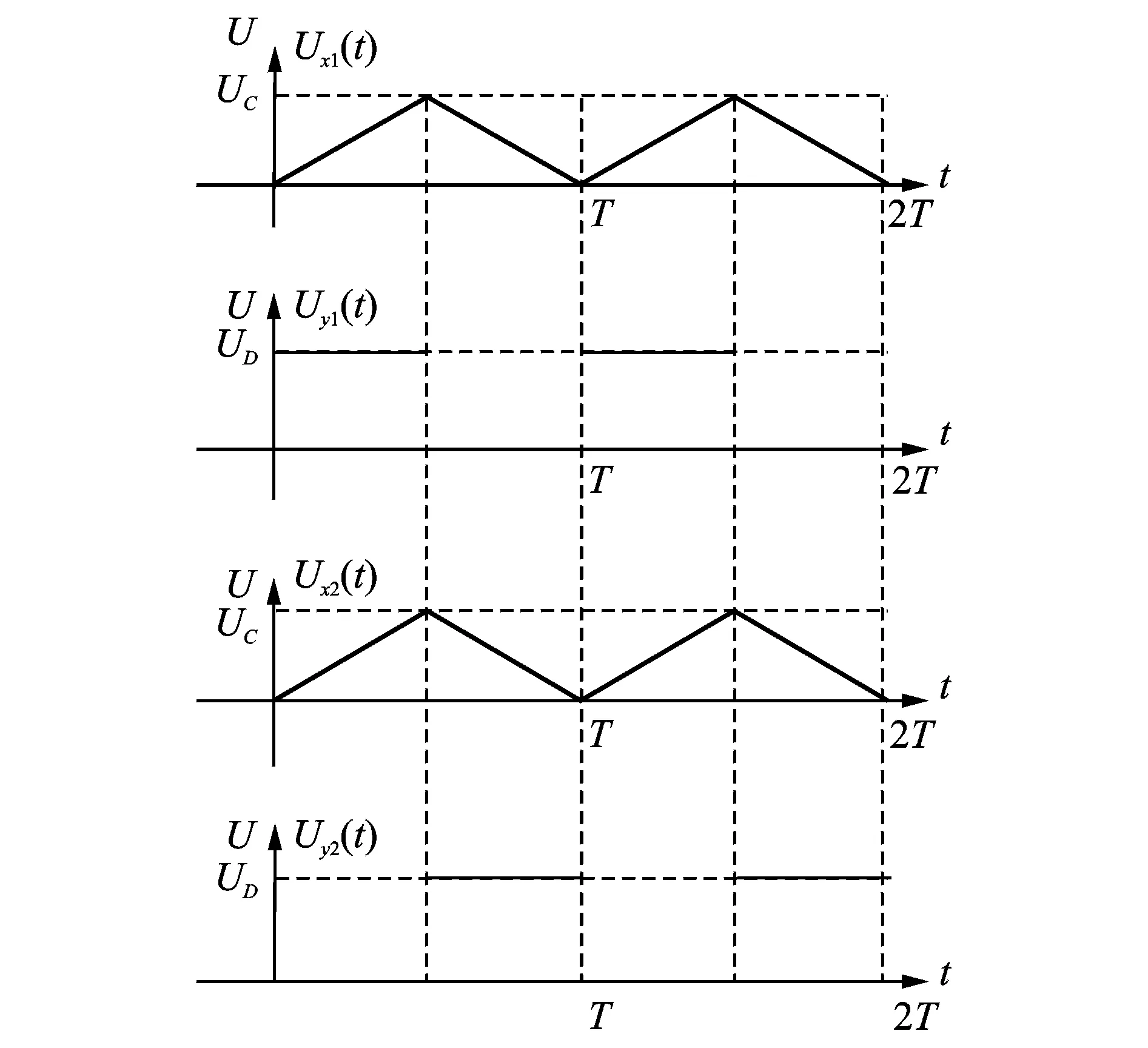
图3 方波-三角波驱动信号图Fig.3 Sequence diagram of the driving voltage (square-triangle wave)
该信号可以表示为
(7)
其中:mod为求余运算。
同样在理想情况下分析电机系统的运动,此时定子双足的运动轨迹为矩形,通过摩擦力驱动动子做匀速直线运动,动子运动位移可表示为
(8)
相应的速度为
(9)
计算得到一个周期内的步距以及双足的平均推力分别为
da=2nd33βUC
(10)
(11)
图4为电机在一个作动周期内的几个典型状态,以此分析系统一周期内的工作原理。
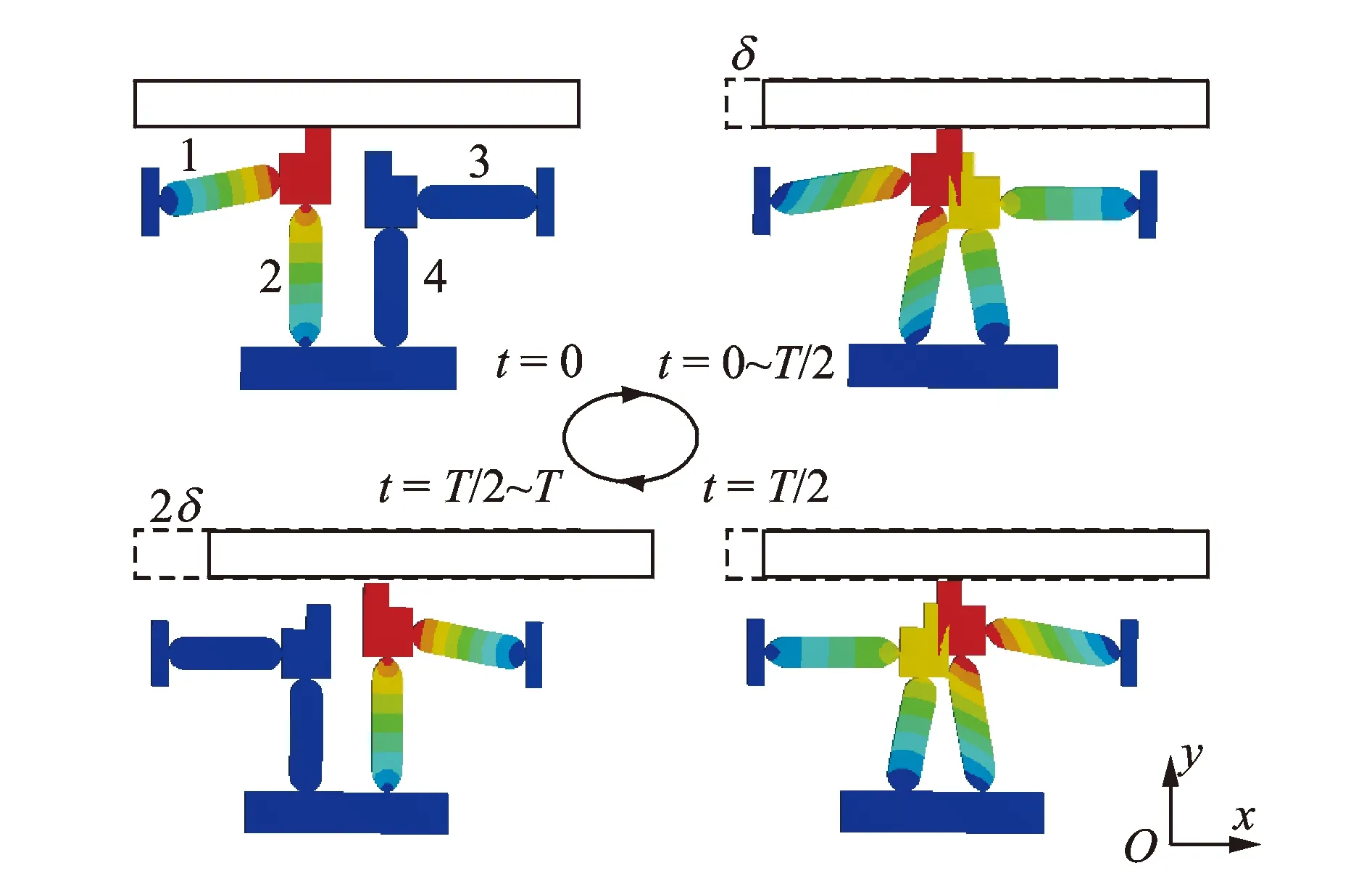
图4 一周期内双驱动足作动示意图Fig.4 Movements of the driving feet in one period
t=0 时刻,叠层压电陶瓷2上的电压从0快速上升到UD,其伸长一定长度,并驱使左驱动足顶住动子,其他叠层压电陶瓷均处于原长状态。
t=0~T/2 时段,叠层压电陶瓷2保持伸长使得左驱动足顶住动子的状态,叠层压电陶瓷1和3上的电压从0缓慢上升到UC,分别使得左右驱动足沿x轴和-x轴方向运动一定距离δ,动子在摩擦力的作用下与左驱动足一起沿x轴方向运动。
t=T/2 时刻,叠层压电陶瓷2上的电压从UD快速下降到0,其长度回复至初始状态,同时叠层压电陶瓷4上的电压从0快速上升到UD,伸长一定长度,此时左驱动足脱离动子,右驱动足顶住动子。
t=T/2~T时段,叠层压电陶瓷1和3上的电压从UC缓慢下降至0,分别使得左右驱动足沿-x和x轴方向运动一定距离δ,动子在摩擦力的作用下与右驱动足一起沿x轴方向运动。
继而回到t=0 时刻,电机如此作周期性运行,在一个周期内实现直线运动,其运动距离为2δ。
上述两种模式的分析均为理想状态,并引入了准静态假设,即假设在驱动信号频率较低时,驱动足与动子接触时二者无相对滑动。交替步进作动模式在实际运动中,由于惯性力的存在,运动形式也基本符合该种假设下的状态。对电机进行单步作动的研究排除了惯性作用对系统运动的影响,使测得的电机步距更为真实,为提高系统精度打下了基础。
图5为只包含第2种工作模式的单个周期输入的驱动信号,与交替步进式的驱动方式类似,可实现电机的单步作动模式。该种模式排除了交替作动模式下惯性的影响,不能完全用理想情况进行分析。
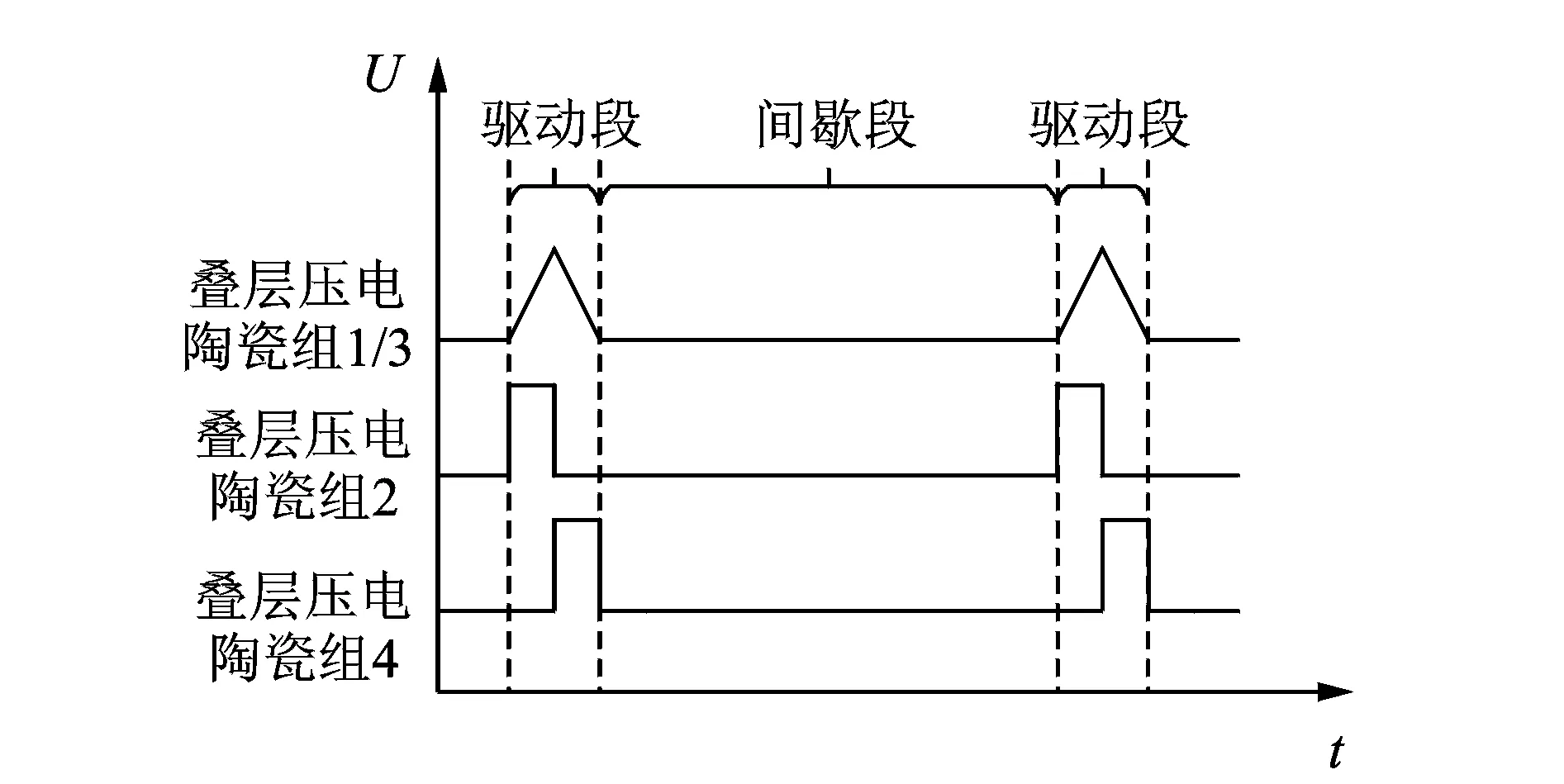
图5 单步作动驱动信号图Fig.5 Sequence diagram of the driving voltage (one-step actuation mode)
此时,动子与两个驱动足可能会同时接触。考虑从t=0~T/2 时段,左驱动足处于摩擦驱动状态,假设其与动子间的摩擦力为f1(t),而右驱动足处于回程阶段,若并未与动子完全脱离,假设其与动子间的摩擦力为f2(t),动子导轨本身的摩擦力忽略不计,对于动子可以得到
(12)
其中:M为动子的质量。
(13)
在单步内电机速度表达式为
(14)
显然电机速度在不断增大,匀速运动速度如式(10)所示,故该电机速度在t0=2UC/μUDM时达到最大,电机开始匀速运动。推导得到一个周期内电机单步作动步距为
(15)
一周期后,由于信号归零,左右驱动足分别瞬间回到初始状态,导致动子出现回撤现象。
对比一周期内交替步进作动模式电机作动步距与单步作动模式下电机的作动步距步距,得到两种模式下步距之比为
(16)
该比例参数反映了两种模式精度的差距,其仅与输入信号的周期、定子动子间的摩擦因数以及动子的质量有关。可以通过调节以上参数,调整两种模式精度的比例,从而适应实际应用的需求。当周期为1 Hz、摩擦因数为0.2、动子质量为3 kg时,该值为2.5。
2 电机结构设计
2.1 电机定子结构
电机定子部分作为整个系统正常工作的动力源,其结构设计对电机的性能将会产生较大影响。图6为本电机中采用的定子结构形式,主要由左右驱动足、四组叠层压电陶瓷、长柔性铰链、垫块、支撑结构以及预紧螺钉组成。驱动足顶端采用平面形式以增大与动子导轨的接触面积,以此来提高驱动摩擦力。定子采用对称式布局,可以避免由于叠层压电陶瓷伸长与收缩时位移变换量的不一致造成的电机双向性能的差异。采用长柔性铰链和预紧螺钉通过支撑结构共同给叠层压电陶瓷预紧力,避免叠堆受到剪切力以及拉力,确保定子可以正常工作。使用长柔铰结构同时预紧两个方向的叠层压电陶瓷,使结构更为紧凑,叠层压电陶瓷的预紧状态更为相似。
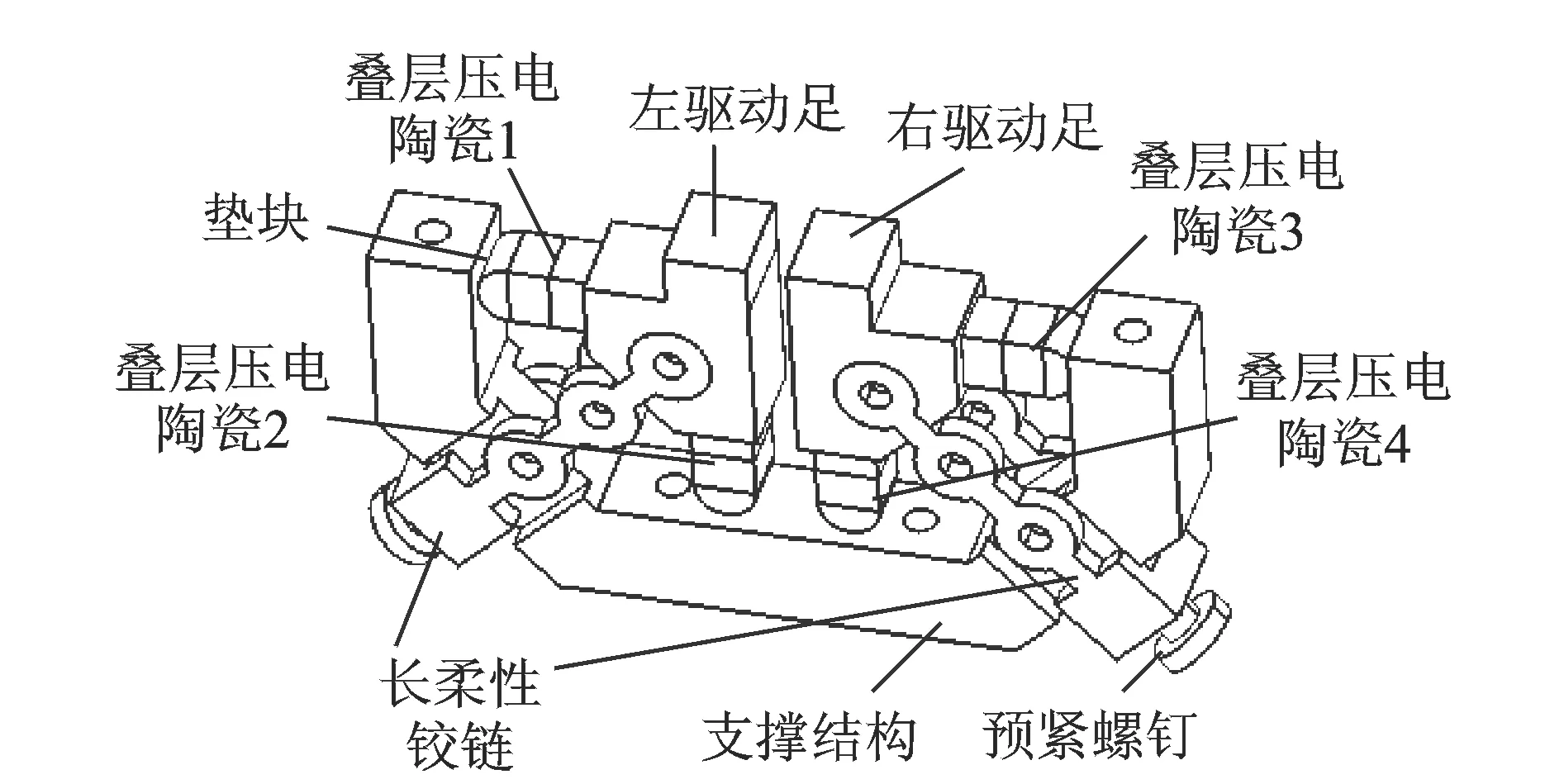
图6 电机定子结构图Fig.6 Structure of the motor stator
2.2 夹持机构与预压力机构
图7为电机的夹持机构与预压力机构示意图。在压电直线电机中,定子的夹持机构起限制定子自由度的作用,使定子保留在垂直动子运动方向的运动自由度,同时限制定子在平行于动子运动方向以及沿面外运动方向的运动自由度。

图7 电机夹持机构和预压力机构装配图Fig.7 Structure of the clamping mechanism and the preload mechanism
采用有限元方法对如图7所示的双板簧结构进行刚度分析。如图8和图9所示,对驱动足顶端施加60N法向载荷,该夹持结构的法向最大变形为1.019 9 mm,对驱动组顶端施加60 N横向载荷,该夹持机构横向最大变形为0.012 8 mm,得到夹持机构横向刚度k2和纵向刚度k1的比值为
(17)
由于电机驱动力与正压力间有一定关系,摩擦因数可取μ=0.2,得到电机工作时夹持机构纵向变形δ1和横向变形δ2的比值为
(18)
可以看出系统在运行过程中,夹持结构的横向刚度远大于纵向刚度,可以有效限制住定子的横向振动,该夹持机构满足压电直线电机的工作要求。预压力机构由安置在定子外壳结构上的预压力螺钉以及预压力弹簧组成,可将测力仪的传感装置放在预压机构与定子之间来测量并调节预压力大小。
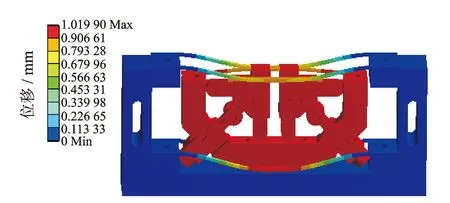
图8 夹持机构法向应变云图Fig.8 Strain cloud of the clamping mechanism (normal)
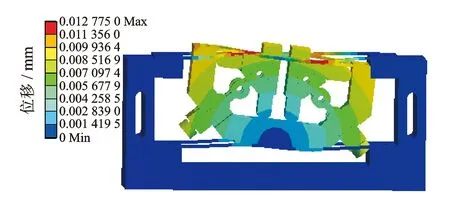
图9 夹持机构横向应变云图Fig.9 Strain cloud of the clamping mechanism (transverse)
3 电机的实验研究
建立如图10所示的实验系统对研制的压电直线电机进行性能测试。电机及用于测量电机输出的激光位移传感器设置在隔振台上,信号发生器发出的驱动信号经过功率放大器放大后接入相对应的叠层压电陶瓷上,示波器用于观察输入信号参数,测力计用于调节电机系统预压力大小。图10为装配好的样机示意图。
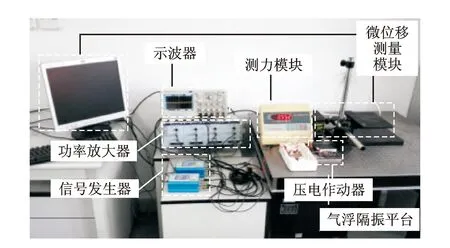
图10 实验环境Fig.10 Experiment environment
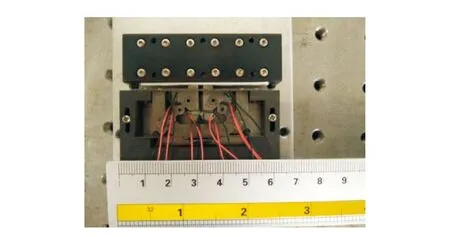
图11 电机样机Fig.11 The prototype of the motor
3.1 连续作动模式
为使电机处于连续作动模式,分别在4组叠层压电陶瓷上施加如图2所示的相位差依次相差90°的正弦波信号,调节电机电压与频率,得到如图12所示的电机速度运动特性曲线。可以看出,频率与电压增高时,电机运动速度近似成线性增大。当输入电压为100 V、频率为100 Hz时,电机运动速度为446.4 μm/s。
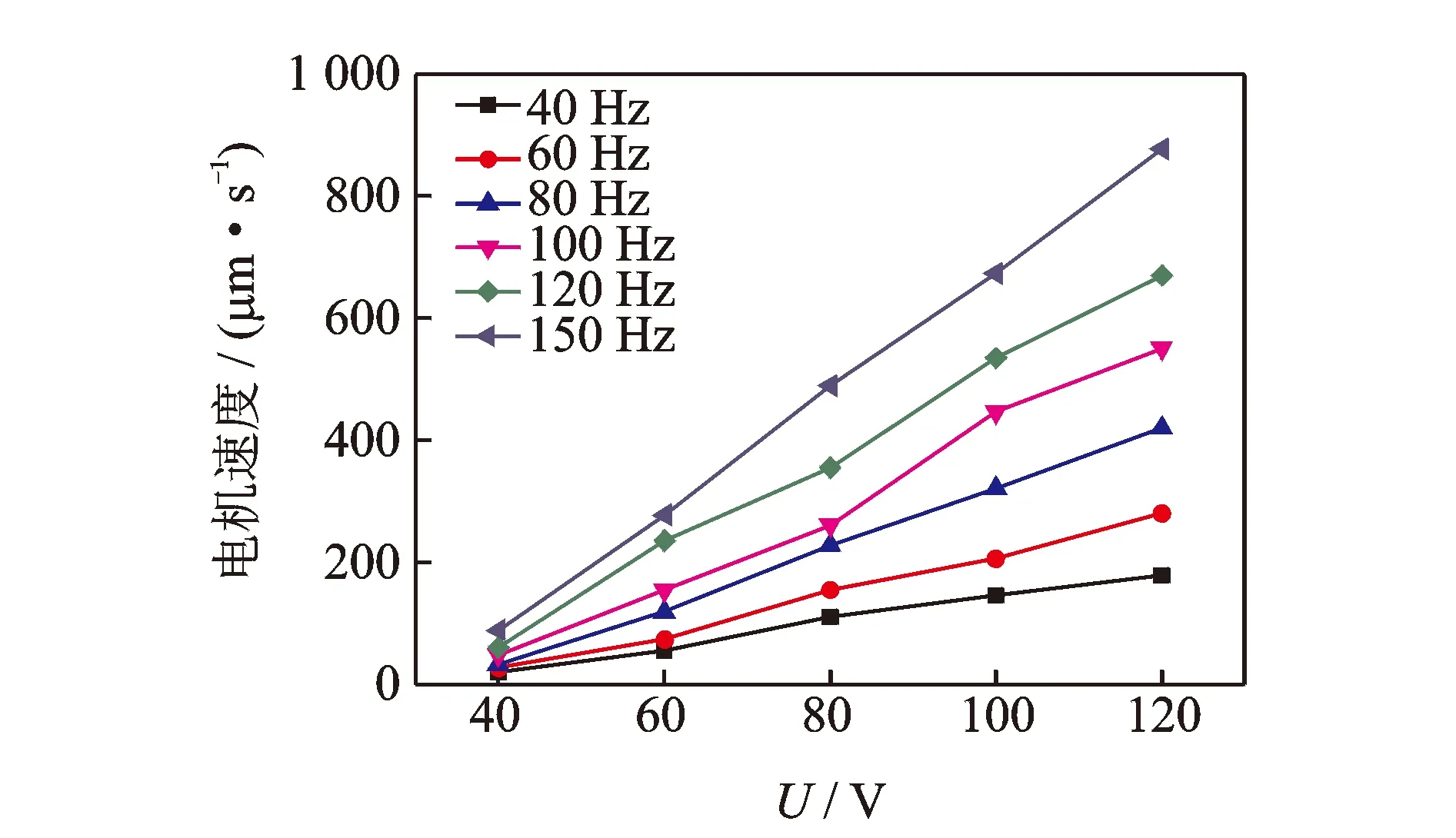
图12 不同频率下电机电压-速度关系曲线Fig.12 Velocity of the motor versus voltage with different frequency
3.2 交替步进作动模式
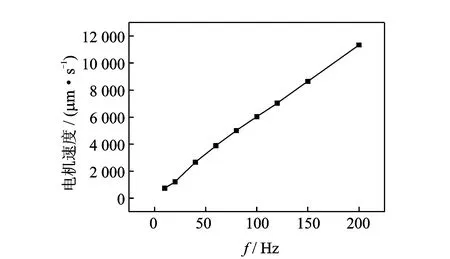
图13 电机速度与频率的关系曲线(100 V)Fig.13 Velocity of the motor versus frequency (100 V)
为使电机处于交替步进作动模式,在4组叠层压电陶瓷上施加如图3所示的方波-三角波信号,改变输入信号电压与频率,得到如图13所示的电机速度运动特性曲线。电机运动速度仍然与频率成线性关系,与理论推导相符合。从图14可见,当输入电压为100 V、频率为100 Hz时,电机运动速度为6 031 μm/s,此时电机速度远大于连续作动模式的电机速度。实验证实方波-三角波信号更有利于定子双驱动足与动子表面交替充分接触与脱离,可以实现更高的运动效率。
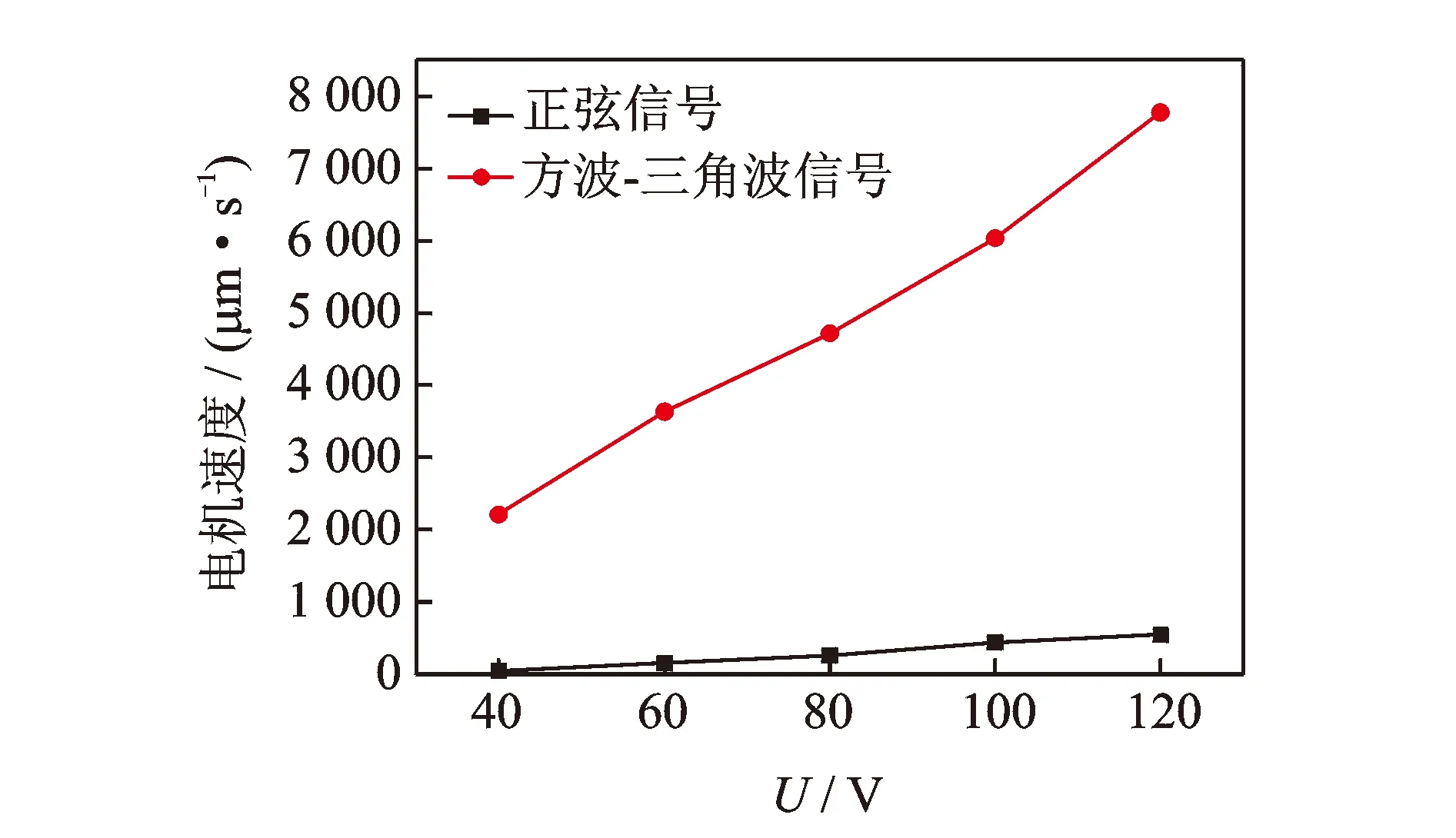
图14 不同驱动信号下的电压-速度关系曲线Fig.14 Velocity of the motor versus voltage under different driving signal
当电机频率加大到200 Hz以上时,电机速度不再随着频率的增加成线性增长,这是由于叠层压电陶瓷在频率增大的情况下迟滞效应越来越明显,不同叠层压电陶瓷之间的迟滞效应差异导致了电机双驱动足的工作时序紊乱,无法继续按照上述原理正常工作。
3.3 单步作动模式
为了测试单步作动模式的可行性,在4组叠层压电陶瓷上施加如图4所示的脉冲信号,固定电机频率为1 Hz,向下调节驱动信号的电压值。图15为输入信号电压为30 V时的电机作动曲线。由图15可见,单步作动模式下,输入信号电压为30 V时的平均步距为333.33 nm。对比测量在交替步进模式下,电压为30 V、频率为1 Hz时的电机速度约为0.8 μm/s,步距约为800 nm,大于单步作动模式下的单步步距。其原因为单步作动模式由于脉冲信号的施加,降低了电机动子运动惯性对性能的影响,从而达到更小的步距。两种模式下步距的比值约为2.4,与理论分析的结果基本一致。
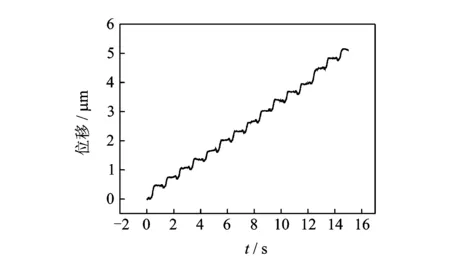
图15 单步作动模式电机作动曲线(30 V, 1 Hz)Fig.15 The movement curve under one-step actuation mode (30 V, 1 Hz)
4 结束语
基于叠层压电陶瓷的逆压电效应,设计研制了一种双足驱动非共振式压电直线电机。电机结构简洁、体积较小,采用对称式结构,安装方便。提出并分析了其3种不同的工作模式,建模研究了不同工作模式下的作动机理。设计了电机整体结构,主要包括定子结构,动子导轨,夹持机构,预压力机构以及底座。制作样机针对3种工作模式进行了一系列实验,验证了直线电机的工作原理,并得出了3种工作模式下电机的运动特性。连续作动模式中,当施加电压为100 V、 频率为100 Hz的正弦信号于叠层压电陶瓷时,电机输出速度为446.4 μm/s。交替步进作模式中,当施加电压为100 V、频率为100 Hz的方波-三角波信号于叠层压电陶瓷时,电机输出速度为6 031 μm/s。单步作动模式中,电机作动单步步距小于同等条件下交替步进模式步距,当施加电压为30 V、频率为 1 Hz的脉冲信号时,直线电机平均步距约为333.33 nm。研究结果表明,该电机可以适应不同场合的工作需求。下一步工作需要对电机的结构进行优化,减小电机步距,提高电机精度,研制工程样机进行封装试验研究。
