应用于废墟环境的六足巡检机器人
2019-08-27方嘉炜庄子槺
方嘉炜 庄子槺

摘 要:针对地震、矿难、山体滑坡、楼房倒塌等灾害后的废墟环境下,文章开发了一种基于足式运动的六足巡检机器人,能够适应各种复杂、恶劣的地形环境,并对指定的气体进行检测,跟踪,定位;且该机器人能够在较远的通讯范围正常的回传采集数据以及图像数据。
关键词:复杂地形;六足;巡检;机器人;stm32;系统
中图分类号:TP242 文献标志码:A 文章编号:2095-2945(2019)22-0108-02
Abstract: Aimed at the debris environment after earthquake, mine disaster, landslide and building collapse, a hexapod inspection robot based on foot motion is developed in this paper, which can adapt to all kinds of complex and harsh terrain environment, and can detect, track and locate the designated gas. The robot can return the collected data and image data in the far communication range.
Keywords: complex terrain; hexapod; patrol; robot; stm32; system
前言
世界上每年都在发生着大量的自然灾害和人为灾害的破坏,如地震、泥石流、矿难等。这些灾害必然造成严重的建筑物倒塌以及人员伤亡,发生灾害后面临的一个至关重要的问题,就是对幸存人员的搜索和营救,且相关研究表明,受困人员在72小时内未得到有效救援,其死亡的可能性就会急剧上升。然而,在复杂的废墟环境下的搜救任务,也会给救援人员、受困人员带来巨大的安全威胁,如二次坍塌等,这也导致救援工作开展的困难[1]。目前,美国、日本等发达国家已经研制出了各类的巡检救援机器人,包含履带式、蛇式、足式等机器人平台。
本文在分析现有的废墟环境下的巡检机器人的基础上,结合新兴的利用气体检测技术,开发了可应用于废墟环境下的复杂地形的巡检六足机器人,并具有自动巡检与手动遥控的工作方式,且带有10倍变焦的摄像头,能够实现180°监控。
1 机械结构设计
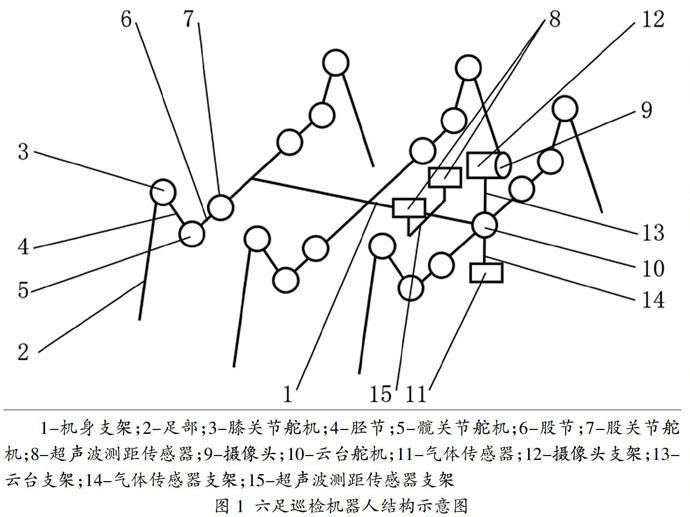
六足机器人的整体结构如图1所示。其运动结构主要由六条仿照多足昆虫的腿部结构设计的机械腿构成[2],根据多足昆虫腿部三个自由度结构,设计出腰关节、髋关节、膝关节三个关节;并采用三个舵机模仿三个关节的动作。由于采用六足式的运动方式,18个关节,对应18个运动舵机进行控制。
为了使得搭载到机器人上的传感器更加稳固,实现更好的检测效果,本文在六足机器人的头部上设置用于装载摄像头的云台装置,可根据地面站的指令进行转动;且在底部还设计用于安装检测传感器的固定支架。为了实现更好的运动控制效果,在机器人机身的前端安置兩个超声波避障传感器,并为之设计固定支架。
2 控制系统开发
六足巡检机器人的控制系统框图如图2所示。主要由六足机器人运动以及云台系统、无线通讯系统、摄像监控系统、气体检测系统、避障系统构成。
(1)六足机器人运动以及云台系统
本系统采用stm32f103作为控制器,通过UART通讯接口与24路的舵机控制板进行连接,控制机器人上的18个运动舵机以及1个云台舵机。舵机控制板上有24路的舵机控制信号,本文仅使用19路。stm32f103控制器通过发送串口指令,控制18个舵机转动的特定的角度,实现六足机器人的前后左右运动、转动等基本运动。通过发送串口指令,控制云台电机,从而带动摄像头进行转动,实现多角度的拍摄废墟环境。
(2)无线通讯系统
六足巡检机器人具有自动控制和手动控制两种模式,模式的切换通过通讯指令来实现,手动控制同样需要依赖可靠的通讯方式。特别在废墟环境下,障碍遮挡物较多,距离较远,通讯信号差,本文采用的433数传技术实现对机器人无线控制能一定程度上的抵抗这些不足。433数传模块一般是成对使用,stm32f103控制器的UART接口与一个433数传模块进行连接,另一个433数传模块通过USB接口与地面站相连接,如此就可以实现稳定的机器人的手动控制,以及机器人回传的数据信息。
(3)摄像监控系统
本系统采用10倍变焦的摄像头,能更好的适应复杂的环境变化;通过5.8G图传模块与地面站显示器进行无线的图像传输。类似的,5.8G图传模块也是成对使用,一个发送、一个接收。5.8G发送子模块搭载在六足巡检机器人上,通过micro usb接口与10倍变焦的摄像头的视频输出口相互连接;5.8G图传接收子模块设置在地面站上,通过视频线与显示器相连接,通过显示器可以直接看到摄像头所拍摄到的画面,如此便构成了机器人的摄像监控系统。
(4)气体检测系统
该六足巡检机器人上搭载气体检测装置,该装置能够将某种特定气体的体积分数转换为对应的电信号[3]。该装置上搭载有二氧化碳传感器,丙酮传感器,氨传感器,异戊二烯传感器和检测人体皮肤释放出的化学物质的传感器。stm32f103控制器通过捕获各个传感器输出的电信号,将气体的成分、浓度等信息进行计算并回传到地面站,并采用定位跟踪算法[4],对气体进行跟踪。
(5)避障系统
避障系统通过测量运动方向上有无障碍物,若有的话则测量与障碍物的距离,到达一定的安全距离之后机器人自动停止运动,进入手动控制模式,并将信号反馈给地面站,等待工作人员进行下一步的操作,如后退或绕开障碍物,实现避障效果。通过stm32f103控制器的UART通讯接口与超声波测距模块相连接,发送指令获取模块测得的与障碍物的距离,该数据为十六进制,且以毫米为单位,需要进行转换为十进制的数值。
3 结束语
六足巡检机器人在模拟的废墟环境下的测试结果为:机器人开始展开工作,基于QT开发的地面站上位机监控软件能够稳定可靠的接收到机器人检测到的数据;并且通过上位机能切换机器人的工作模式,以及控制摄像头的多角度转动;显示器能够正常的显示机器人回传的图像数据。检测到特定气味时,上位机能够及时的发出警报。
综上所述,本文针对废墟环境下开发了一种足式运动的,基于气味检测的巡检机器人,能够有效地替代传统的人工探测,实现废墟的安全隐患排查。
参考文献:
[1]张策,赵国存,张国宏.地震废墟搜救机器人控制系统开发与应用[J].控制工程,2011(09):77-79.
[2]谢鑫,李琼麟,郭建.仿生六足机器人的设计与实现[J].机械制造,2017(10):20-23.
[3]高伟,张兴凯.基于气味探测的矿井人员搜救设备探讨[J].中国安全生产科学技术,2007(12):117-120.
[4]王俭,赵鹤鸣.面向气味跟踪与定位的机器人变步长搜索算法[J].计算机工程与应用,2009(01):243-248.
