基于场景的AEBS道路测试方法研究
2019-08-27宋雪松吴海飞
文/曹 寅 宋雪松 吴海飞
随着高级驾驶辅助系统(ADAS)概念的持续发酵,其中如何避免或减轻碰撞的技术经过这几年的摸索和发展,成为了汽车安全领域提高安全能力的热点。此类技术通常将功能分为预警提醒和执行两个层面:预警提醒层面是通过与驾驶员进行人机界面交互,及时把危险信息提供给驾驶员;但若提醒不足以让驾驶员采取应有的安全措施,系统便会通过介入到执行层面来避免或减轻危险所造成的损伤。就执行层面的技术来说,今后将进一步发展自动制动和转向技术。制动和转向技术是驾驶过程中驾驶员控制车辆的关键所在,如何正确及时地帮助驾驶员完成制动和转向,是提高安全驾驶的关键所在。
主动制动控制的发展技术路线致力于解决驾驶员在制动过程中遇到的种种危险隐患。其中,自动紧急制动系统(AEBS)作为最直接减少或避免碰撞危险和最为模仿驾驶员行为方式的主动安全制动系统,被格外重视。
本文重点阐述对AEBS的道路测试方法研究,关于主动转向技术不再另作赘述。
一、AEBS技术发展现状
AEBS主要由感知(如:侦测、识别和测距)、中央处理器(如:分析、判断)和指令执行控制(如:采取预警、执行制动的措施)三个技术模块组成。感知技术的快速发展,使得AEBS尽可能地采取避撞或减轻损伤的制动行为。
1. 感知系统发展现状
现有感知系统所用的感知原件大致可分为:毫米波雷达、视觉传感器和激光雷达等。
① 毫米波雷达
它早期便作为识别前方车辆的感知原件应用于自适应巡航系统,第一个被应用于AEBS中。通过多普勒原理发展了24 GHz、77 GHz频段的中、远距离雷达,可高精度捕捉具有明显反射特征的车辆目标,精确测速测距,但对于静态物体不敏感,对行人和其他低反射物体的识别能力较低,目前的最新技术可通过检测腿部运动时的多普勒变化进行行人目标的识别。
② 视觉传感器
视觉感知系统的高速发展、日益成熟和价格的优势,使成为目前替代毫米雷达作为AEBS感知模块的最好选择。通过视觉传感器便能分析提取数据(如:速度、位置关系),并能判定物体的类型,故它是最类似人类眼睛的传感器。由于视觉感知始终是通过光学进行,也会有类似人类的感知极限。如探测距离、较暗较亮的光环境,都是限制视觉感知的关键因素。虽然,视觉传感器通过算法和感知原件技术的进一步发展,努力地扩大极限范围,但由于这些局限,故这方面感知能力不能与毫米波雷达相比。
③ 激光雷达
它的感知具有测量解析度高、抗干扰能力强、探测性能好和不受光线影响等优点。它兼备毫米波雷达和视觉传感器的优势部分,还克服了其不足,是未来感知系统的趋势所在。目前,高昂的成本和庞大的数据信息流,限制了其在现有车辆系统框架下的发展。
有上述可知,AEBS的性能好坏将取决于采用的传感器种类与复杂度。若多种感知系统融合混合搭配使用,从而既规避各种传感器的缺点,又能面对越来越复杂的潜在交通事故。
2. 国内外测试方法和标准现状
欧盟关于AEBS相关的标准与方法,采取了商用车和乘用车不同的路径。由于商用车造成的往往是重大事故,早在2012年欧盟便发布了全球首个针对商用车的ECER131《自动紧急制动系统性能测试》标准,同年便要求欧盟成员国准备强制执行此项标准。日本、美国相继在2014年和2015年分别出台相关针对商用车的AEBS性能测试标准。乘用车方面,欧盟新车评价规程(EuroNCAP)组织通过对交通事故的研究和统计,制定了相关针对乘用车的测试方法,美国高速公路安全保险协会(IIHS)也拥有自己的AEBS标准,且方法上与欧盟基本保持了一致。
我国从2017年开始进行大规模的ADAS标准立项工作,其中包含商用车和乘用车的AEBS性能测试标准,GB 7258-2017《机动车运行安全技术条件》涉及了关于规定大型客车符合AEBS相关国家标准的要求;2018年中国新车评价规程(C-NCAP)也全面发布,并有对应的相关标准进行AEBS测试;交通部公路研究院前期对国内营运车辆推行的JT 883-2014《营运车辆行驶危险预警系统技术要求和试验方法》作出预警功能的要求;2019年营运车辆JT/T 1242-2019《营运车辆自动紧急制动系统性能要求和测试规程》也已发布。上述标准的起草和执行都证明了我国对于这项技术的肯定和重视。
二、测试方法研究
AEBS测试方法可分解为软件虚拟算法测试、传感器在环测试、整车在环测试和整车道路性能测试等。本文把配置AEBS的车辆看成一个单独的系统来研究AEBS的整车道路(车对车)性能测试。
1. 传统测试场景研究
道路场景测试方法的研究基于道路事故场景的采集、分类和统计之后,还原出真实交通事故的碰撞形态,并结合当时AEBS发展的真实能力来设计场景。车对车场景被设计成AEBS只为纵向的追尾碰撞提供保障。测试方向归纳成三类后碰撞(CCR)场景,如图1所示。
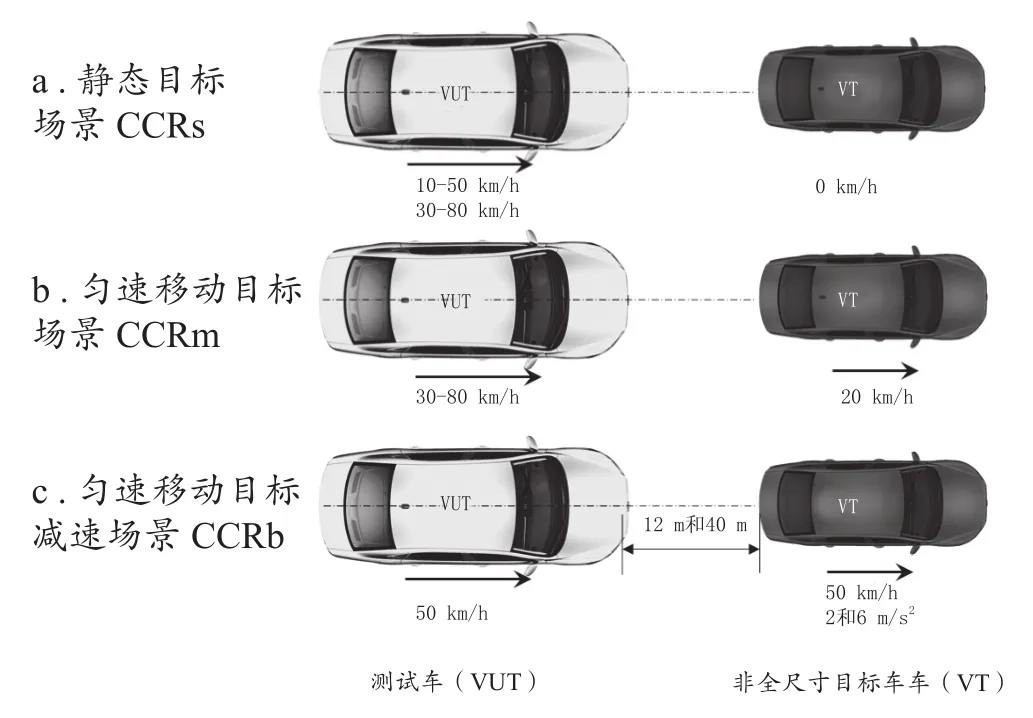
图1 CCR测试场景示意图
从功能角度来看,AEBS拥有预警功能的前方碰撞预警系统(FCW)和制动功能(AEB)。是ADAS其中的一种。早期的车辆可能只配备FCW来帮助驾驶员,是为了以驾驶员的意图和控制为先,也是在为了感知技术不成熟的情况下,避免因误操作而导致更严重的交通事故。图1中三类场景的设计,可同时针对预警和执行两个层面进行测试。由于预警功能的最终目的是通过驾驶员自行执行制动以避免或者减轻危险,整车的测评方法往往是以碰撞结果为导向。为了量化系统的有效性,在测试中需要一个统一的标准来模拟驾驶员的反应时间和制动动作。场景参数如下表1、表2描述。

表1 CCRs、CCRm试验参数表km/h

表2 CCRb试验参数表
2. 新型测试场景研究
随着AEBS的感知识别算法和执行能力的不断改进和发展,对测试场景的研究也朝着更为贴近真实道路的形态演进。经过多年测试技术研究,场景单一、测试参数固定,让系统在有限的范围内通过制动时间的冗余来提高测试结果的方法,已经不能满足更高水准系统验证的需求。
进一步分析事故场景形态,真实重构后,提取更多的关键参数,让系统在更真实场景中进行道路实车验证。图2把AEBS(车对车)测试场景分为纵向和横向控制两种,从固有的场景和车速关系,再根据真实碰撞可能演变的不同环境(如:纵向碰撞重叠率、横向碰撞点)展开参数分析。

图2 AEBS横向纵向控制参数分解
① 后碰撞偏置场景
对比上述测试方法,在CCRs、CCRm原有场景基础上,增加以车辆中心线为基准的±50%、±75%偏置碰撞的测试场景,实际应用场景中基于车辆中心点偏置的碰撞场景远远超出车辆100%碰撞场景。通过不同的算法,系统可判断VT与VUT的横纵向位置关系,做出及时警告和制动。在此过程中,横向位置的判断对感知系统的算法提出较高要求。偏置场景的加入,将在考核AEBS基本性能的基础上,进一步提高系统在真实应用场景下的识别、决策和执行能力。测试参数如图2所示,偏置碰撞场景如图3所示。
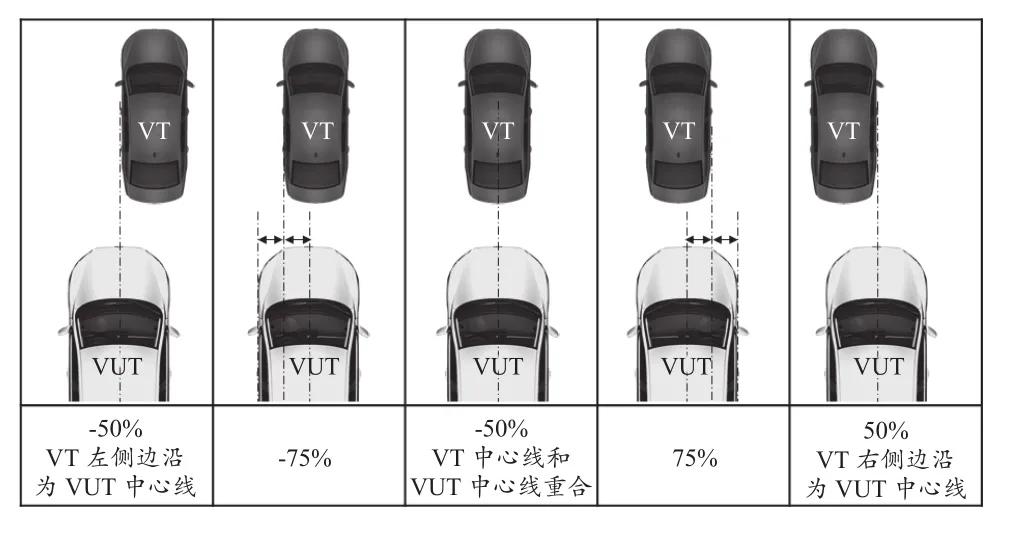
图3 偏置碰撞场景示意图
② 十字路口左转冲突场景
十字路口所发生的事故形态多样,包括转向与行人冲突,车与车的转向、直行冲突,车与自行车/摩托车之间的碰撞等等。基本上发生事故的原因与闯红灯、视线模糊、注意力不集中和开车不良习惯有关。车辆转弯事故一般是在左转或右转时,由于盲区或判断错误造成的。这种场景下的特点是驾驶速度相对都比较低的,所以利用AEBS进行介入能有效避免或减轻危险程度。
根据事故统计结果,左转车辆与直行车辆的冲突比率在十字路口事故中占据高比率,通过场景设计,以车速、转向半径和碰撞点等不同关键参数构建场景,用于实车道路测试(见图4)。

图4 十字路口左转场景示意图
如图4所示,通过不同的车速去构建不同的测试转向路径,转向路径由一段直线、一段过渡转向线、一段固定半径转向线、一条过渡回转线和一条直线路径组成。全尺寸目标车(GVT)将遵循与VUT初始位置相邻的车道中的直线路径,与GVT相向而行。VUT和GVT的直线路径距离中心车道虚线中心1.75 m。
VUT和GVT的路径需要同步,在假定AEBS没有执行反应时,GVT的前边缘与VUT的车头中心位置相遇,意味着提供了一个GVT与VUT车辆宽度的50%重叠的碰撞场景定义(见图5)。

图5 十字路口左转碰撞点示意图
三、总结与展望
本文提出的测试方法都基于交通事故数据归纳统计,重构场景,提取关键参数进行方法研究。但是受限于测试设备和测试效率,无法大规模地进行实车道路测试,同时测试条件大多在是理想的光照、气候和路面等环境下进行。不可否认,这是解决大规模概率危险场景的必经之路。
如何让系统对不同环境做到冗余可控,也是之后研究的主要方向之一。硬件能力的极限,会影响系统决策的准确性,所以需要更进一步地利用不同传感器,协同组成感知系统融合执行器,进行更合理的车辆控制。上文提及控制车辆的关键在于直接帮助驾驶员进行转向和制动系统的执行控制。把整车作为一个系统来看,我们更需要的是一个上层的感知系统,同时融合多执行系统的平台。例如,上述方法中,车对车偏置后碰撞场景中,之所以设置最小重叠率为50%,一方面是因为感知原件的识别困难,对于目标的解析精度要求非常高,容易造成误识别;另一方面是在重叠率小于50%后,制动未必是最好的执行选择,或许自动紧急转向才是更合理的执行选择。
AEBS的发展,是为了持续辅助驾驶员降低事故风险的ADAS,基于场景的测试方法可以直接系统地考核功能的有效性。如果在前期进行传感器硬件再环测试,将会进一步提升测试效率和测试的验证有效性,同时提高整车道路测试的安全性。