基于麦克纳姆轮的自主绘图机器人的运动控制与绘图设计分析
2019-08-26金炫旭章胜桃陈锦姚志广刘晓玲官源林
金炫旭 章胜桃 陈锦 姚志广 刘晓玲 官源林
摘 要:为了减小斑马线、广告图形绘制等的工作量,解决二维打印技术的空间局限性和自动化困难,设计了一种全自动绘图小车。应用打印机原理,以较小规模图案可实现大面积场地绘图;采用麦克纳姆轮作为走行装置,应用霍尔元件编码器电机及陀螺仪的双重负反馈形成闭环控制系统。应用点阵原理将复杂图形表示为简单代码,实现了一维信息与二维图形的转换。
关键词:麦克纳姆轮;点阵原理;绘图机器人;负反馈
DOI:10.16640/j.cnki.37-1222/t.2019.22.093
随着技术的发展,已有多种全向移动机器人通过全向轮实现全方位的移动[1],同时二维打印技术已经发展成熟。但公路划线工作的自动化水平较低,并且将二者相结合的全向移动式全方位绘图机器人在市面上仍较难见到。已有研究中,基于麦克纳姆轮全向移动平台机器人[2]和基于51单片机的麦克纳姆轮机器人[3],可以实现在平面的全向移动和自主跟随,但未与绘图功能相结合。基于3D打印技术的麦克纳姆轮小车[4]虽是结合画图与全方位移动这两个技术,但是并未给出详细的控制原理和硬件设计。
本文设计了是一种全自动绘图机器人,通过使用麦克纳姆轮驱动2D绘图机器人实现任意时刻任意方向的自由运动,结合单片机控制技术实现对机器人的精准定位和操控。该机器人的设计将的解决二维打印技术的空间局限性和自动化困难的问题,实现移动式平面绘图。
1 绘图机器人的绘图原理
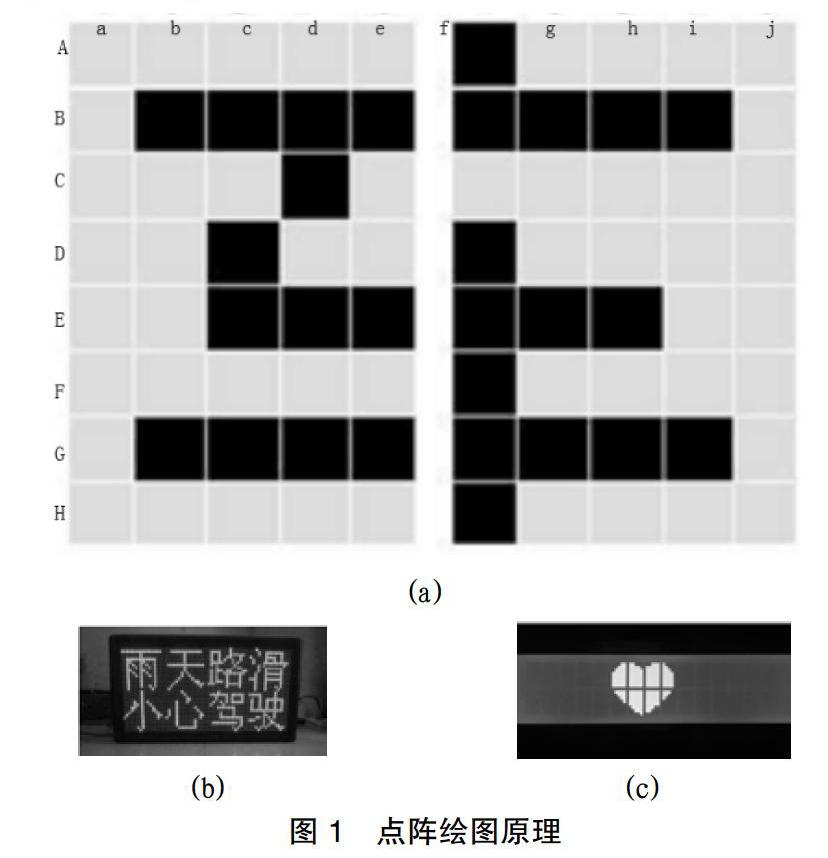
绘图机器人的绘图主要利用了点阵的原理,点阵是现在运用较广泛的一种图形生成方案,在日常生活中十分常见,LED广告牌通过LED灯完成点阵,写成文字;以及光纤电视、二维码、像素游戏中的图形都运用到了点阵原理。
点阵字体即为将每一个字符都分成16×16或24×24个点,然后用每个点的虚实来表示字符的轮廓。如:在LCD1602的显示屏中使用点阵显示字符通过LCD1602的所有可编辑点,每一格是5×8的点阵,通过编辑这些点是否显示来构成字符,如图1(a),所谓的文字也是按图形的形式展现出来的。当需要显示图形时即可按照上述思维进行绘图,如图1(b)和(c)。
通过麦克纳姆轮平台为载体的机器人携带点阵输出设备,按规划路线行进,通过程序控制机器人在不同的地方停下写入点,从而构成图案,实现绘图。其中规划路线就是点阵方格中的每一个点,而写入点通过喷涂的形式进行。在一块足够大的平面上就可以完成绘图的任务。
2 麦克纳姆轮绘图机器人的机构设计
2.1 麦克纳姆轮平台的运动原理
麦克纳姆轮拥有独特的结构,由它构成的平台可以通过速度矢量的相互作用改变矢量和的方向与大小,是一种可以实现在任意方向上平移和原地旋转的特殊平台[5]。
机器人从设定初始位置运动时依靠各自机轮的方向和速度,作用于轮上的力最终可以满足产生一个合力矢量,从而保证了这个平台在最终的合力矢量的方向上能自由地移动,而不改变机轮自身的方向。由此,机器人便拥有了结构紧凑,运动灵活的特点,可以灵活方便的实现直行、斜行、横行、S形行进、零半径任意角度旋转等运动。
2.2 麦克纳姆轮的运转特性
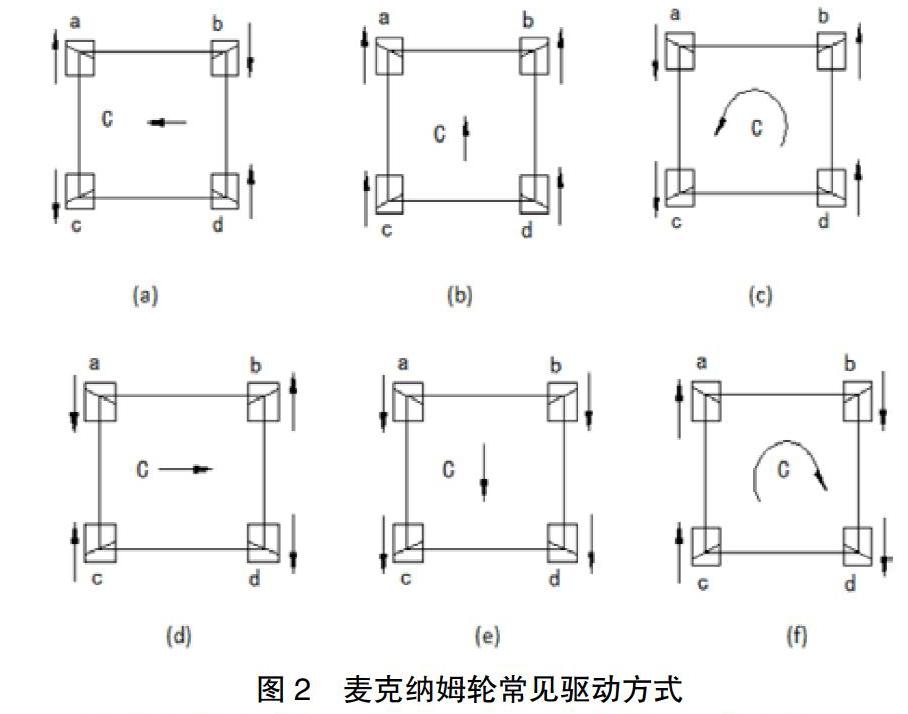
麦克纳姆轮一般成对工作,因为轮子的独特结构,对角线的麦克纳姆轮一般为一对,这样便于总体结构的方向控制。图2中为麦克纳姆轮常用的几种驱动方式,从图中可见位于四个角的麦轮上都有一条斜线,这条斜线代表麦克纳姆轮的旋向,其中对角线的轮旋向一致。
绘图机器人需要用的只有前后左右的移动方案,即图2中(a)、(b)、(d)、(e)方向。若要达到平移方向不发生偏移,则对麦克纳姆轮的驱动电机要求较高。
2.3 基于麦克纳姆轮的绘图机器人的设计
基于麦克纳姆轮的绘图机器人如图3所示,主要有小车框架,麦克纳姆轮,漏斗形墨盒,墨盒夹持装置以及喷墨机构等组成。针对机器人在运行的过程中存在大量的启动停止以及转弯的运动过程,要求尽力减小运动时机械机构的精度误差,因此在墨盒的设计上采用漏斗形的设计。漏斗形墨盒有助于合理利用空间,将机器人整体的重心集中到机器人的几何中心,有利于提高机器人运行的平稳性和启停的准确性。当四个轮子轉向相同时,绘图机器人可与正常的汽车一样平稳行驶,当四个轮子的转向不同时,由于轮子本身特殊的结构,可使机器人在实现向各个方向运动的同时不改变车身的方向。当点阵输入单片机后,机器人可通过事先编好的程序,按照一定的顺序,运动到指定位置,然后通过喷墨机构进行喷墨打点,最终实现打点功能。
3 麦克纳姆轮的控制系统
3.1 整体控制方案
本文给出的麦克纳姆轮绘图机器人的控制方案如图4所示。
基于麦克纳姆轮的绘图机器人运用单片机作为主控板,将需要绘制的图形数据输入到单片机,当单片机接收到图形数据后一方面控制电机运转,带动机器人行进,一方面控制水泵喷墨完成绘图。
3.2 对于绘图机器人的负反馈控制
针对麦克纳姆轮在实际使用时出现的问题,文中采用负反馈模型[6]对机器人进行控制。
首先采用霍尔编码器对电机的转动进行控制,电机上有一磁性元件,电机转动会输出脉冲,将此脉冲信号输出,作为单片机的输入信号,可以实现对电机转速、圈数进行控制。并在电机输出轴上加上减速器,则实现小角度的控制。通过编码器将机器人每个轮的速度反馈到电机驱动的函数中,减少了机器人在运作中的路线偏移[7]。
其次采用陀螺仪加速度传感器来实现对机器人行进途中遇到障碍物后的路线校正。陀螺仪能实现对角运动的测量。若在行进过程中遇到障碍(例如小石子等),机器人将自动偏移路线,产生偏移角度Δθ,由陀螺仪反馈该值到单片机中,由单片机控制的麦克纳姆轮系统经一系列计算输出一-Δθ的反馈值,使小车回归正常的行进路线。
4 图形输入方案的设计
4.1 关于图形输入
本文提供两种不同成本的图形输入方案:第一种方案是运用栅格纸计算坐标,在栅格纸上画出图形,求出需要打点的坐标,并在机器人运作前,将坐标信息输入到单片机中。如将图1中栅格左上角第一个点定义为Aa,通过该图形各点的坐标和图形数据即可进行编程控制。
第二种方案为运用电路板硬件读取图形数据,即由设计的读取电路板将绘图信息读取出来,并通过无线数据传输方式将数据传输到机器人的主控芯片中,将这种电路板制成读取电路板,在每一行上串上下拉电阻,焊上排针。在电路板上用导电笔画上所需绘制的图形,并通上电,由读取电路板读取图形数据并传输到单片机中,再通过无线传输手段将数据传到机器人中,实现绘图。
第一种方案实现较易实现,并且造价较低,耗材较少,但对操作者要求较高,必须自己能够通过图形写出代码;第二种方法则是面向用户,操作者只需在电路板上画出图形并将其放在读取板上,但是这种方案造价较高,画一次就会用掉一张电路板,而且电路板受规模限制,大小不能超过读取电路板,第一种方案则不受此限制,对于需要十分细致的图形第二种方案并不适用。不管哪种方案都需要事先知道图形并将其画出来,而机器人所完成的则是在人工难以绘制的地方绘图并把输入图形并放大。
4.2 关于图形输出
绘图机器人采用点阵原理进行绘图,本文采用水泵将水箱中的颜料抽出并通过喷嘴将颜料扩散来实现。
为避免机器人行进过程中因颜料风干速度较慢,会出现车轮压住上一行的点,由于一个或者几个轮子粘上了颜料会导致其摩擦系数发生变化,麦克纳姆轮系统的稳定性也会受到影响,会导致图形中出现变形。为此,通过在机器人底盘下加风扇帮助风干,并且将行进路线错开,即首先从第一行开始绘点,然后第三行,第五行…直至画完最后一行或者倒数第二行后再从第二行开始。通过这两个解决办法的相互配合可以降低颜料风干速度的对图形的影响。
5 结论
(1)“基于麦克纳姆轮的绘图机器人”采用点阵原理进行绘图。(2)麦克纳姆轮采用霍尔元件编码器电机与陀螺仪的双重负反馈形成闭环控制改善其平稳性。(3)提供两种绘制图形方案,一种是较易实现的通过草图求出代码并输入,另一种是用图形读取电路板读取绘制好的图形信息。(4)采用水泵与喷嘴的组合将颜料扩散,实现图形输出,考虑到颜料风干速度的影响,使用风扇帮助风干,并隔行行进。
参考文献:
[1]李育文,王红卫,李芳.机器人發展概况及展望[J].河南科技,2002(01):26-27.
[2]何超.基于麦克纳姆轮的全向自行式移动平台研发[D].西安理工大学,2018.
[3]莫然,张进,高淑芝.基于麦克纳姆轮的全向移动自主机器人[J].山东工业技术,2017(08):233.
[4]曹义,李君,丁瑞卿.基于3D打印技术的麦克纳姆轮小车设计与制作[J].智库时代,2019(10):251+254.
[5]琚玲,薛鹏.基于麦克纳姆轮全向移动平台的自主跟随系统[J].电子世界,2019(01):183-184.
[6]胡寿松.自动控制原理基础教程[M].第4版,2017.
[7]吴建平,彭颖,贾章健.传感器原理及应用[M].第3版,北京:机械工业出版社,2015.
作者简介:金炫旭(1997-),男,山东青岛人,本科,研究方向:机械设计制造及其自动化专业。
