海洋与船舶运动仿真控制系统的设计
2019-08-24王海威
魏 冰,王海威,殷 明,庄 严,孟 莹,罗 晶
基于运动平台的抗眩晕训练和模拟操纵训练研究及应用较为普遍,在模拟仿真训练领域的应用广泛,以此构建模拟海上手术环境进行训练或实验,原理上完全可行[1]。本研究根据海上医疗救治研究的实际需求,利用波浪叠加原理,混响音效模拟等方法,采用“虚实结合,力求实效”的研究方式,设计了更符合实际需求的伤情救治实验研究新平台。海上医疗救护系列研究的深化拓展,有利于提升海上医疗救护研究成果的水平和质量。
1 系统设计与研究方法
1.1 系统设计 船舶环境医疗救护模拟实验装置的核心功能由海洋与船舶运动仿真控制系统提供,通过仿真波浪不同谐波的频率,模拟船舶在海浪中的运动姿态、航行音效等,可以构建更加逼真的海上医疗救护的操作体验,为海上医疗救护系列研究和实操提供仿真环境。
该系统主要由海洋与船舶运动仿真控制单元模块和船舶摇摆运动仿真模块组成。具体实现功能如下:①海洋与船舶运动仿真控制单元模块:能进行浪级、天气、海区等初始情况的设置,计算生成实时的数字海洋;给出逼真形象的海洋海浪动画显示。②船舶摇摆运动仿真模块:能进行艏向角、浪向角、航速等初始情况的设置,同时解算海浪作用下船舶摇荡运动,给出船舶实时的运动姿态;同步生成船舶在海浪中航行的三维场景。
1.2 研究方法
1.2.1 海洋与船舶运动仿真 由于真实海面上兴起的海浪是不规则的随机波,它可以看作是由无穷多个相互独立的,具有不同幅值、频率和初相位的规则波叠加而来的,这就是波浪叠加原理。单独的规则波方程如下:
ζ=ζacos(kξ-ωt+ε)
(1)
式(1)中,ζ表示波面离开静水的高度,ζa表示波面的幅值,k为波数,k=2π/λ,λ为波长,ω为角频率,ε为初相角。由流体力学知识可知,对于水深大于λ/2的波,如果s,则波长λ、周期T、波速C可得到如下关系:
k=ω2/g
(2)
利用波能谱函数Sζ(ω)求得ζai。利用谐波叠加原理得到仿真的海浪模型。
根据船舶的船型参数建立船舶的横摇、纵摇以及升沉的运动模型。另外,还需要采集实际航行时船舶摇摆的数据,并进行综合处理,根据船舶的实际数据建立风浪受力模型,该模型集成了不同海况下运动平台的摇摆规律,是模拟医疗救护实验平台能在各种模拟海况下进行模拟实验的基本依据。
1.2.2 摇摆运动仿真 船舶在不规则波浪的海上完成救援任务时,必然受海浪的扰动而产生振荡运动。而海面上风浪的大小及其运动是不规则的、紊乱的,不能用一个简单的数学公式来描述。因而若把船舶作为一个刚体,则其在海面上的运动有6种形式,3种是线性运动:纵荡、横荡、垂荡;3种是回转运动:横摇、纵摇和首摇。
2 结果
2.1 海洋与船舶运动仿真 以船舶在海面航行造成横摇的关键因素波倾角为例,其定义为:
α=ζaksin(ωt+ε)
(3)
式(3)中k为波数,k=ω2/g,g为重力加速度。
由于船舶在海面航行方向与波浪的传播方向不一致,因此船舶实际上遇到的波浪周期和波长会发生相应变化。定义遭遇角με船舶航向与波浪方向间的夹角,作用于航行中船舶的有效波倾角为:
(4)
式(4)中:波速为C,船舶的运动速度为Vc。
由于实际海浪可以看做是由无穷多个规则波叠加而来,因此海浪波倾角可表示为:
(5)
式(5)中ζai、εi和ωei分别为第i次谐波的波幅、初相位、遭遇频率。
由式(5)可知,要模拟海浪,关键要得到相应的ζai、εi、ωi参数。
在实际仿真中,不可能对所有频率的谐波进行仿真。因此,本研究选取其中影响较大的频段来进行仿真。下面采用等间隔法对频率进行离散化。设仿真频段为ω1~ωn,采样频率增量为Δω=(ω1-ωn)/n,仿真频段及频率增量的选择见表1。
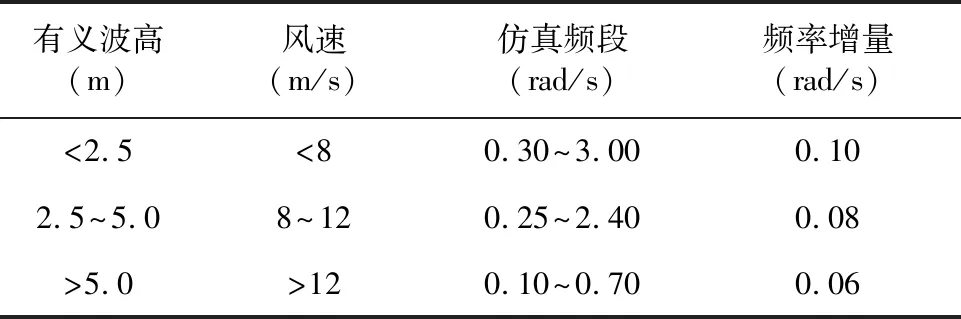
表1 各种海情的仿真频段和频率增量的选取
在根据不同海况按照表1确定采样频率ω1,ω2,…,ωn和频率增量Δω之后,可按式(6)计算ζai:
(6)
式(6)中:Sζ(ωi)为波能谱函数Sζ(ω)在采样频率ωi处的函数值。本项目采用的波能谱函数为P-M谱,其表达式为:
(7)
式(7)中H1/3为有义波高。
随机海浪的初相角εi可由程序中0~1之间随机数x生成,具体为:
εi=x·2π
(8)
计算遭遇频率:
(9)
将ζai、εi和ωei代入波倾角式(9)即可得到海浪的有效海浪波倾角。图1即是按照上述方法得到的有效海浪波倾角仿真曲线。
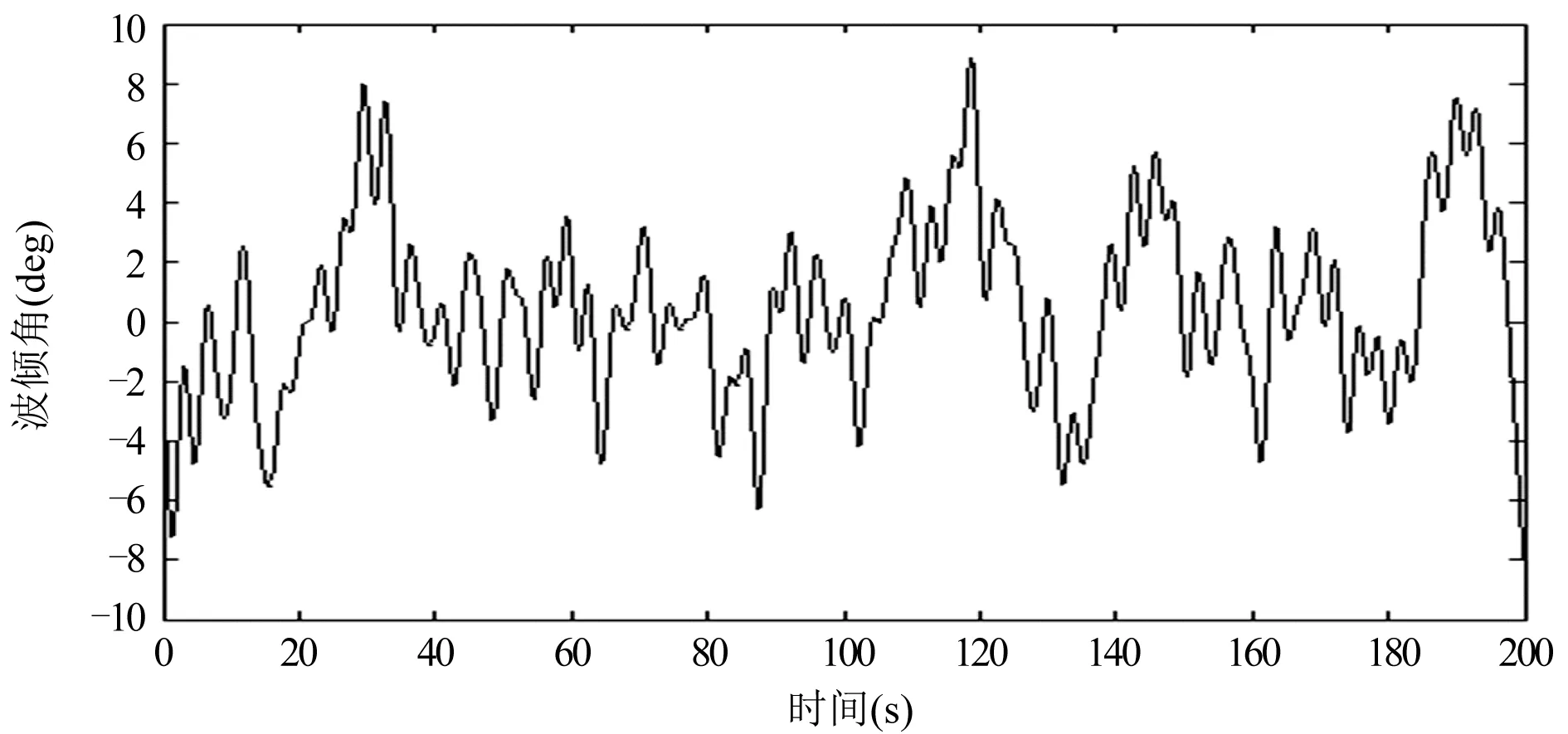
图1 海浪波倾角仿真曲线
应用该海浪波倾角仿真曲线结合常规频率的谐波即可提供医疗救护实验平台在此种模拟海况下的模拟实验环境。
2.2 摇摆运动仿真 根据《海洋运载工具动力学》中的有关经验表格进行估算得到我国主要登陆艇在三级海况下的横摇、纵摇和垂荡的运动参数,为实时模拟对象船舶在海浪中的摇摆运动,必须建立对象船舶的摇摆运动模型,下面同样以横摇运动模型为例进行说明。在波浪作用下,作为刚体的船舶横摇可以用绕x轴摆动的角度φ,角速度φ′,角加速度φ″来表征运动情况,并规定从船尾向船首看时,以顺时针方向为正,逆时针方向为负,如图2所示。
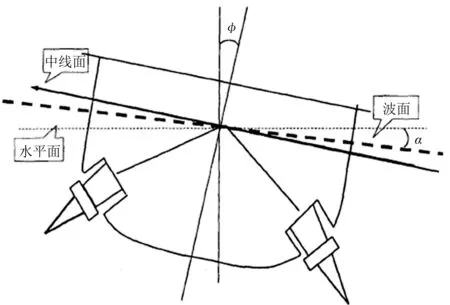
图2 横摇示意图
本项目采用Conolly的横摇运动方程,船舶线性横摇可以表示为:
(10)
式(10)中:Ix为相对于通过船舶质心的纵轴的惯量,ΔIx为附加惯量,2Nu为每单位横摇角速度的船舶阻尼力矩,Dc为船舶排水量,h为横稳心高,Mf为减摇鳍控制稳定力矩。
由于船舶排水量受到实际载重影响,会与设计值存在一定误差,同时船舶实际的阻尼力矩也会与计算中采用的名义值存在一定误差,因此,式(10)中存在不确定参数。经查阅资料得到本项目模拟船舶的标称横摇方程为:
(11)
在海洋环境中,船舶的质量,横稳心,横摇阻尼系数等均会随着船舶实际载重量及海况的不同而产生变化,以及横摇建模理论参数在实际计算中产生的误差,这就导致船舶横摇模型中也存在不确定参数。酌情设其中的参数存在5%的误差,仿真结果误差在工程允许范围之内。
3 讨论
由于船体在海洋上的6种运动中,只有纵摇、横摇和垂荡是单纯的振荡运动,其主因是当船在受到晃动而偏离平衡位置时,这一些运动会承受力矩和复原力的作用。而另外3种运动却不会如此,除非引起变动的扰动力和力矩本身是从相反的方向交替地起作用[2]。船体的这种单纯的振荡运动影响海上医疗救护工作执行质量及效率,是导致医护人员不适的重要原因,因为由这类振荡运动所引起的加速度值偏大,而且反复地、长时间地作用于人的前庭器官。通常认为垂向加速度值在0.109~0.200 g的范围是人类可以承受的极限。鉴于由横向摇晃引起的垂向加速度值基本不会超过0.200 g,因此可认为由纵向摇晃和垂荡所引起的加速度是医护人员不适的主要原因。当然,若3者同时存在,特别是垂荡和纵摇同时存在时,更易让医护人员感到不适。原因是当3者同时存在时,除了振荡运动引起的加速度外,还可能会有附加的哥氏加速度产生。与此同时,由于船在波浪上的垂荡、纵摇和横摇运动较其他的振荡运动更为显著,而且对于整个耐波性,横摇、纵摇和升沉运动起着重要的作用,因此,模拟摇摆实验平台中运动仿真控制系统应重点关注垂荡、横摇和纵摇。
海洋与船舶运动仿真控制系统是船舶环境医疗救护模拟实验装置的重要组成部分,以算法规划路径,模拟船舶在海浪中的运动及姿态,结合全电动6自由度运动平台模拟船舶摇摆平台,更为逼真的模拟海上医疗救护场景,为海上救治研究提供一种可靠的实验环境、为海上医疗救治流程确定与验证提供一种研究手段。