基于卡尔曼滤波的飞机着陆导航系统设计
2019-08-23马翰飞李甜田陈兆飞
文/马翰飞 李甜田 陈兆飞
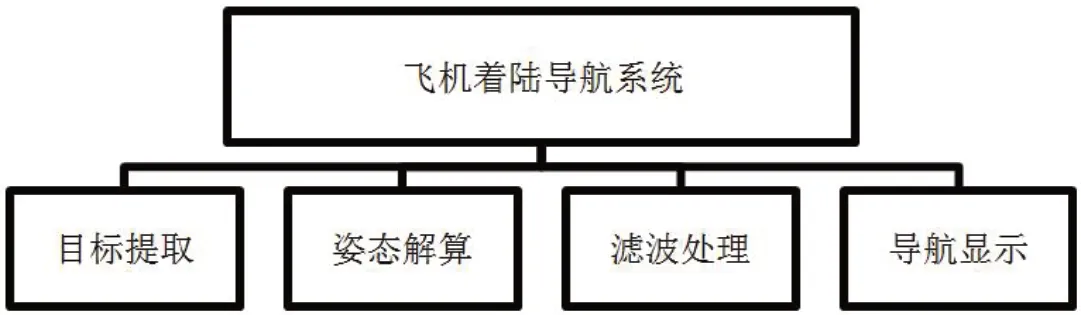
图1:飞机着陆导航功能结构图
飞机或无人机着陆的安全性与导航系统密不可分。根据导航系统物理特点,飞机着陆导航系统可分为全球定位系统(Global Position System,GPS)、惯性导航系统(Inertial Navigation System,INS)、光电图像导航系统。GPS在卫星信号较弱的情况下可靠性受到严重影响,惯性导航系统的会产生随时间积累的误差,其战时实用性受到限制,光电图像导航方法具有可视性好、无线电静默、非主动性的特点而受到重点关注。近年来,计算机视觉技术发展迅速,其在飞机导航领域内的应用与日俱增,如基于视景增强显示的辅助导航技术,同时,基于图像特征的视觉导航技术已成为该领域内的研究热点。由于视觉导航技术通过被动方式获取外界信号而无需接收外界信号,用视觉技术取代GPS而与INS构成组合导航系统增加了导航系统的自主性。本文构建了特定形状的合作光源靶标,该靶标装有多光谱光源,将靶标固定于跑道旁某一定点,通过图像融合和增强获得对于指挥员或飞行员可视性好的图像信息,利用摄影测量方法解算飞机相对跑道某一定点的方位和距离等姿态信息,之后通过模拟飞行试验对导航姿态测量系统进行精度分析。
1 系统原理
本系统中,首先利用导航合作目标日盲紫外波段光源的特点提取图像中合作目标标识点;然后利用空间目标在图像中成像的几何原理计算出飞机相对于合作标识的姿态信息;构造卡尔曼滤波系统,通过合适参数设置对姿态信息进行滤波处理;输出姿态数据给飞控系统以完成导航控制,并显示相关导航数据;系统功能结构如图1所示。
2 姿态测量与导航

图2:图像融合硬件系统框图
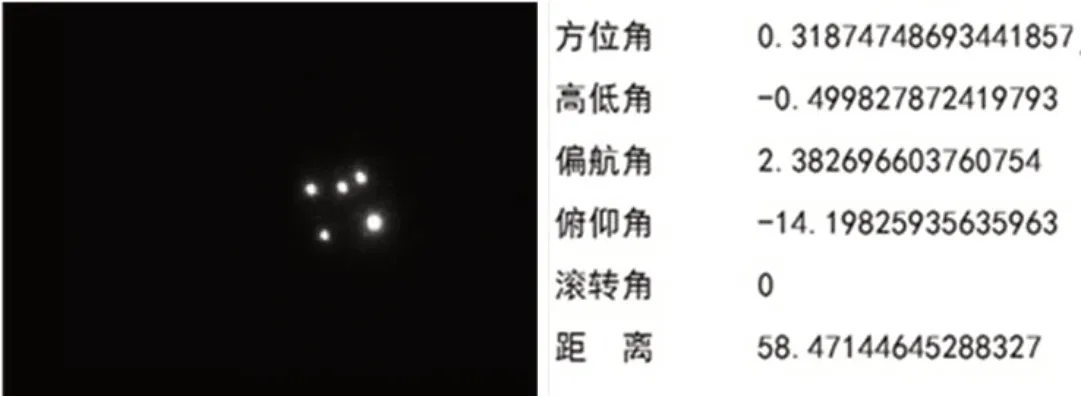
图3:目标提取与导航显示
2.1 多点PNP飞机姿态解算
如果在目标上设置若干个相互位置关系已知的合作标志点,标志点的数目和分布满足PNP问题可解条件,则可以作为PNP问题进行求解,计算目标的位置姿态参数,而在有些应用里,可以定制合作标志点的分布方式,然后根据较简单的空间几何关系计算目标的位置姿态参数。这样计算得到了很大的简化,既可以作为迭代计算的初值,也可以在精度要求不高的任务中直接应用。
本文采用5个合作标志,其中4个分布在直径为D的圆周两条相互垂直直径的端点,第五个合作标志从另四个合作标志分布位置的中心突出这4个合作标志所在平面距离r。用探测器端的一台相机拍摄目标器的图像,根据5个合作标志的成像位置分析目标器的相对位置和姿态。
2.2 导航数据卡尔曼滤波
卡尔曼为了克服维纳滤波器的不足之处提出了一种递推滤波方法,称为卡尔曼滤波。卡尔曼滤波是对时变统计特征进行处理。他不是从频域,而是从时域的角度出发来考虑问题。卡尔曼滤波已经在很多领域得到广泛应用,包括机器人导航、控制等。近年来更被应用于图像处理领域。
3 设计与仿真
以上两节研究了基于多点合作信标的飞机姿态解算方法和卡尔曼滤波的优点,接下来将基于上述理论研究成果,构建实物系统进行试验的问题。系统设计分为硬件设计和软件设计两部分,具体内容如下。
3.1 硬件系统设计与构建
系统硬件构成主要包含靶标端和服务器端两个部分,整体硬件系统结构如图2所示。
按照物理和功能分解,基于卡尔曼滤波的导航系统硬件由信标单元、探测及成像单元、目标识别单元、姿态解算单元、卡尔曼滤波单元组成。
3.2 软件系统设计与实现
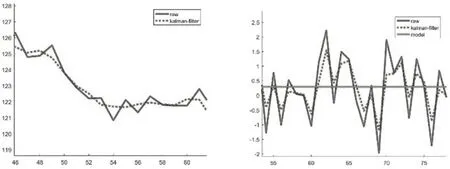
图4:原始姿态导航数据与卡尔曼滤波数据及其误差曲线图
在紫外目标提取和位姿估计算法研究的基础上,我们进行了紫外目标提取与位姿估计和卡尔曼滤波软件的开发,开发语言为C++,该语言开发效率高,与各类支持库互通性好。如图2所示。
3.3 实验结果
无论在白天或黑夜,深紫外波段的目标光源都能清晰成像,实现目标的稳定提取。不管白天还是夜晚,基于紫外图像的目标跟踪都能为姿态解算提供可靠的数据输入。图3为基于紫外光源的目标提取试验。可以看到紫外图像没有复杂背景的干扰。
综合导航界面显示了合作信标图像和飞行器姿态数据信息,为监视员、飞行员和指挥人员提供必要的信息,如图3所示。
最后本文对动态目标的姿态导航数据和卡尔曼滤波后的数据进行了相应的分析,如图4所示。
4 总结
本文给出了一种基于卡尔曼滤波的导航方法系统架构设计,并初步验证了系统的可行性和性能指标。基于紫外合作信标的飞机导航系统能够为指挥员或飞行员在不良天侯下提供可视性较好的图像信息,基于卡尔曼滤波的飞机姿态信息能提供较准确的飞行器姿态信息。经模拟飞行试验和数据分析,该系统中卡尔曼滤波算法能有效滤除数据噪声,对导航数据更加平滑。
