一种基于非制冷型红外探测器的温控技术
2019-08-22王涛曹峰杨粤涛钟海林孙冲
文/王涛 曹峰 杨粤涛 钟海林 孙冲
1 引言
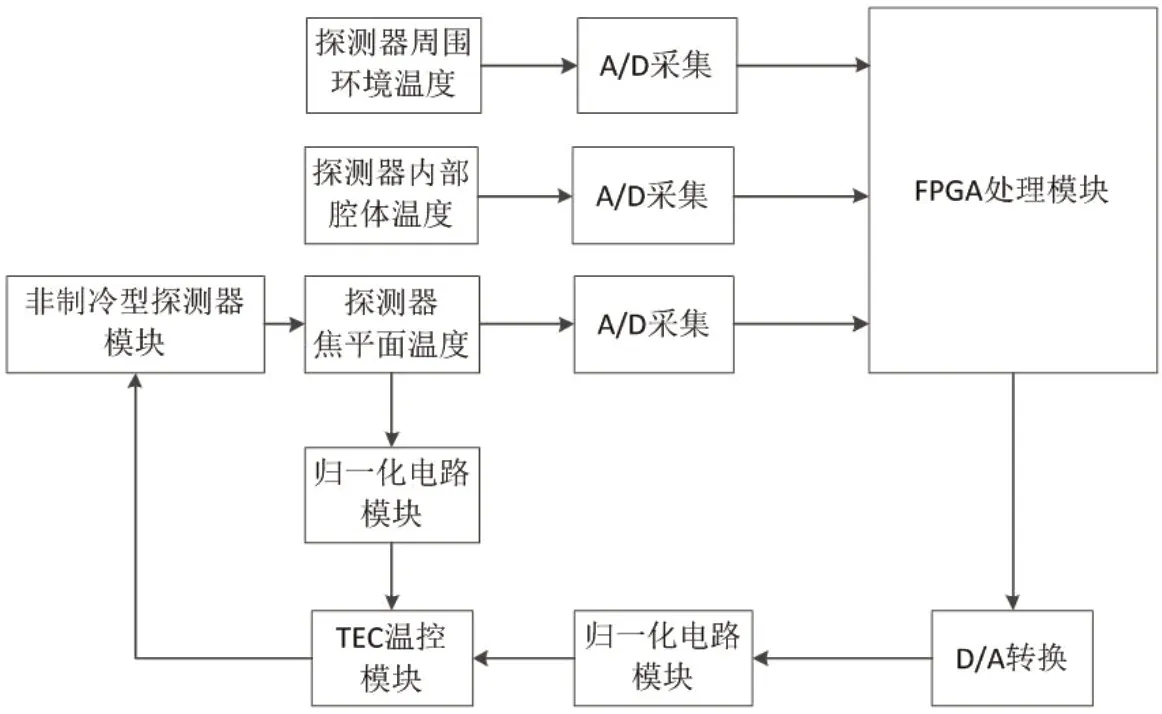
图1:非制冷型红外探测器温控方案框图
红外热成像技术在军事和民用方面都有着广泛的应用,红外热成像技术中所使用的核心器件红外探测器按照制冷的方式,可以分为制冷型和非制冷型。其中,非制冷型红外探测器能够工作在室温状态,并具有稳定性好、成本低、功耗小、体积小等优点,且具有高灵敏度和高分辨率能力,是未来小型低成本热像仪的主流材料。虽然非制冷型红外探测器不需要像制冷型探测器一样必须工作在超低温环境下,但是工作环境温度必须是稳定的。如果环境温度波动严重,焦平面的各个像素点将会叠加不同的时变噪声,使红外图像的均匀性恶化,加大图像非均匀性校正的难度。因此,非制冷型红外成像系统一般都带有温度控制电路,为焦平面提供一个高稳定度、低漂移的工作环境。本文使用TEC 进行温度控制,但基于TEC 的温度控制方案中TEC 的制冷(热)功率和热像仪散热功率之间需要有良好地匹配关系,否则将会导致制冷不足或者导致功耗过大,从而导致温控失效。因此,针对上述现象,本文通过合理设置初始焦平面温度,实时检测环境温度和腔体温度并实时调整焦平面温度等多种手段,让热像仪尽快达到热平衡状态,让TEC的功耗降到最低,从而最大可能的防止TEC温控失效。

图2:非制冷型红外探测器温控实现方法流程框图
2 非制冷型红外探测器温控实现方法
如图1所示,为非制冷型红外探测器温控方案框图。
如图2为非制冷型红外探测器温控实现方法的流程框图,红外热像仪上电后,初始环境温度Tsint、初始腔体温度Tqint,初始焦温Tjint 的值基本是一致的,FPGA 根据采集到的初始腔体温度来设置初始预期焦温,即初始设定温度Tset,如果此时Tj 和Tset 不一致,TEC 控制电路通过调节输出电流的大小和方向来调节Tj 的大小,直到Tj 和Tset 一致。如果Tj 和Tset 一致,则温控模块停止工作。当环境温度Ts 发生b℃变化时,FPGA 读取当前的环境温度Ts 和当前的腔体温度Tq,FPGA根据Ts 和Tq 重新设置预期焦温,即设定温度Tset,TEC 温控电路开始工作,直至Tj 和Tset一致。同理,当腔体温度Tq 发生a℃变化时,FPGA 读取当前的环境温度Ts 和当前的腔体温度Tq,FPGA 根据Ts 和Tq 重新设置预期焦温,即设定温度Tset,TEC 温控电路开始工作,直至Tj 和Tset 一致。
为了让TEC 温控电路工作在最佳状态,有以下三个基本原则需要把握:
(1)非制冷型红外探测器对温度的高低并没有严格要求,它只需要一个长期稳定或者某段时间内相对稳定的温度环境下工作。
(2)热像仪内部达到热平衡后,TEC 应停止工作或者小功率工作,否则,TEC 工作时散发的热量极容易使探测器失去热平衡,导致TEC 工作失效。
(3)热像仪热平衡点温度的寻找极其关键。因为热像仪达到热平衡后,最终设置的焦平面温度大于热平衡温度,则TEC 一直处于加热状态,假设最终设置的焦平面温度小于热平衡温度,则TEC 一直处于制冷状态,以上两种状态导致TEC 一直处于工作状态,增加了热像仪整机功耗和热量,容易导致TEC 温控失效。
在上述三个原则下,我们分析下以下两种极端情况:
(1)TEC 至始至终完全不工作,让热像仪自己达到热平衡,这种情况下TEC 功耗为0,功耗最低,但是在热像仪上电后达到热平衡这段时间内,探测器所处腔体温度和焦平面温度是时刻变化的,热像仪输出画面的非均匀性最差,直接影响热像仪的成像质量,如图3(a)所示。
(2)热像仪一上电后,TEC 直接将焦平面温度设定为热平衡温度,则在热像仪上电后到热像仪达到热平衡后的这段时间内,TEC 一直处于大功率制冷或加热状态,此时TEC 功率最大,散发的热量最大,如图3(b)所示。
针对上述两种极端情况,本文所提及的方法,应该介于以上两种之间的一种折中方案。将热像仪上电后到热像仪达到热平衡状态后这段温升过程中,分成n 个焦平面温度相对恒定的过程,当然此时的腔体温度一定是时刻改变的。每个小段温升中,探测器焦平面温度保持不变,热像仪输出的画面非均匀性一致,TEC功耗和散热量相对较小,如图3(c)所示。
通过以上分析,图3(c)所示方案最为合理,具体实现步骤如下:
(1)假设环境温度未发生改变,确定热像仪开机后到热平衡状态后的焦温的温升。
关闭TEC 温度控制电路使TEC 不工作,热像仪刚上电时,探测器焦平面温度为Tjint,热像仪工作一段时间,直至探测器焦平面温度稳定后,此时热像仪腔体内达到热平衡,此时探测器焦平面温度为Tjph,Tjph-Tjint=△Tj,△Tj 即为热像仪内部达到热平衡后的焦温的温升,则取a=[△Tj /n]([]为取整, n 为整数)。热像仪上电后,FPGA 每当检测到腔体温度发生a℃变化后,都需要重新设定探测器焦平面温度为(Tjint+a)℃,当检测到腔体温度发生第n 个a℃变化后,热像仪内部接近完成热平衡状态,FPGA 重新设定探测器焦平面温度为(Tjint+△Tj)℃,此后就不需要再设定焦平面温度。
(2)当热像仪在工作过程中,环境温度发生b℃变化。
此时热像仪内部到达热平衡后的焦温温升可近似看做为△Tj’=△Tj+b。为了简化计算,我们假设环境温度的变化发生在热像仪刚上电的一瞬间,此时环境温度发生了b℃的变化。FPGA 每当检测到腔体温度发生[△Tj’/n]变化后,都需要重新设定探测器焦平面温度,当检测到腔体温度发生n×[△Tj’/n]后,热像仪内部接近完成热平衡状态,FPGA 重新设定探测器焦平面温度为Tjint+△Tj’,此后就不需要再设定焦平面温度。但是外界环境温度发生改变时,并不一定都是发生在热像仪刚上电的一瞬间发生的,可能发生在热像仪未达到热平衡的过程中,或者发生在达到热平衡后,也可能在这些过程中发生多次环境温度变化,在这些情况下,计算过程变得相当复杂,算法的复杂度也在增加,算法实现的难度也随之增加,也可能导致FPGA 功耗的增加,得不偿失。
(3)简化算法,对计算方法和参数进行修正。
因此,为了简化计算,仍然按照环境温度未发生变化时的情况进行处理,对参数进行一定的修正。即FPGA 每当检测到腔体温度发生a℃或者检测到环境温度发生b℃变化后,都需要重新设定探测器焦平面温度为(Tjint+a)℃或(Tjint+b)℃,当检测到腔体温度发生n 个a℃变化后,热像仪内部接近完成热平衡状态,FPGA 重新设定探测器焦平面温度为(Tjcnt+△Tj+b)℃,此后就不需要再设定焦平面温度。在这个过程中,若环境温度发生b℃变化,FPGA 都需要重新设定探测器焦平面温度,一般情况下,取b=[△Tj/m](m 为整数)。m 和n 的取值需根据不同的热像仪及散热情况而确定,m 和n 的设置既不能让△Tj/n、△Tj/m 太小,让FPGA 频繁设置焦平面温度,又不能让△Tj/n、△Tj/m 太大使得TEC 处于大功率工作状态,应折中选择合适的数值。本设计中,a,b 的取值为 6℃。当然,FPGA 每次设置焦平面温度时,都需要挡片进行配合给探测器提供一个均匀的参考平面进行图像校正。此外,△Tj 受到热像仪的散热结构,散热材料,腔体空间,热像仪整机功耗等因素的影响而不一样。
3 结论
针对以上分析,我们可以得出,TEC 不能不工作,也不能一直处于大功率工作状态。本文所提及的方法,TEC能够尽可能少的工作,能够尽可能在低功率状态下进行工作,以减少TEC 的功耗及发热量,从而优化TEC 温控效果。
