基于机器视觉测量技术的地铁站台限界检测仪设计*
2019-08-21何越磊余佳磊龚佩毅汤友福
何越磊 余佳磊 陈 猛 龚佩毅 汤友福
(1.上海工程技术大学城市轨道交通学院,201620,上海;2.上海欣铁机电科技有限公司,201100,上海//第一作者,教授)
地铁站台限界是在站台范围内车辆运行、停靠与旅客乘降安全所需要的空间尺寸[1]。目前,我国地铁站台限界检测还是采用接触式的测量方法,利用站台尺、刻度尺、铅锤和量杆等器具进行测量[2]。该测量方法的测量误差大、作业繁琐复杂、效率低,不能满足站台限界测量和管理的需要。针对接触式检测暴露出的种种问题,近年来国内外学者对限界非接触自动检测技术进行了研究。例如:瑞士AMBERG公司的GRP 5000限界检测小车利用激光测距方法实现隧道包括车站限界的快速连续检测;英国的UPS-80限界检测车和法国的MGV检测车都是利用机器视觉实现全线包括站台的限界检测[3]。但是这些检测装置都是搭载在大型轨检车上或是轨道走行设备上,运输及使用的便携性较差,不能满足随走随测的要求。
针对轨道交通站台限界测量问题,研究了一种基于单目视觉和三角测量原理[4]的便携式非接触站台限界检测仪,将摄像机、传感器等集成在便携式多功能机械构架上,放置在站台边缘,就可以实现站台限界非接触静态测量。基于此,针对近景斜角大范围测量技术的难点和关键的标定问题,提出了基于基准点匹配的标定方法完成检测仪的标定,实现站台限界检测和超限的准确判断。
1 检测仪整体方案设计
非接触式站台限界检测仪构架方案如图1所示。选用画幅满足要求、整体尺寸较小的视觉传感器实现图像数据的采集,并和激光发生器实现三角测量关系,达到被测站台轨行区三维几何关系的重建效果。同时为了解决设备的调平状态,利用倾角传感器搭载调平机构实现设备的水平调节,使整体结构能够保持相对水平状态。为了实现设备整体高效传输与数据处理能力,采用Gige Vision标准和RS-232通信协议,实现图像信号和倾角信号的传输。结合图像算法与数据处理设计检测仪的软件,实现检测仪的人机交互和超限报警。将检测仪的各模块集成在小型可拆卸的便携式机械构架中,利用统一电源模块供电,实现系统作业。
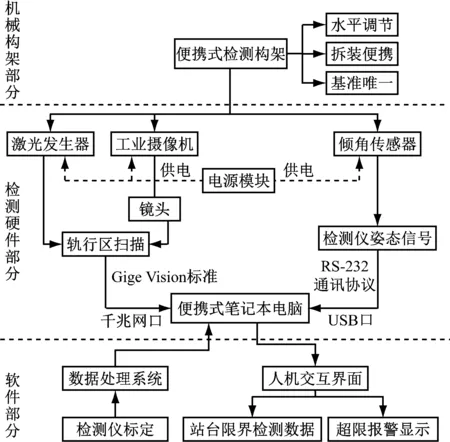
图1 检测仪构架方案设计
2 检测仪的检测原理
2.1 检测原理
保证轨道有正确的几何形位是车辆安全行驶的首要条件。通过捕捉两股钢轨图像来确定线路中心线位置,站台的边缘以线路中心线和轨面为基准来确定,有相对几何尺寸要求,进而保证轨行区的安全限界要求。站台限界检测仪利用三角测量原理,激光发生器在站台层以一定倾斜角度照射在轨行区,由工业摄像机捕捉钢轨断面轮廓线图像,并由倾角仪记录水平角和俯仰角信息进行角度补偿。 利用图像处理方法解析出轨头轮廓线参数,通过匹配标准钢轨轨头轮廓线,求得轨距和左右轨高低,并确定钢轨中心线和线路中心线位置,进一步则可求得站台边缘距钢轨顶面的高差和水平距离,这是与站台限界相关的重要指标。
2.2 测量参数指标
地铁车站横断面如图2所示,站台限界检测仪主要检测的参数指标包括:
1) 轨距S,为两股钢轨头部内侧轨顶面以下16 mm处两作用边之间的最小距离。
2) 左右轨高低η,为左右两股钢轨顶面的相对高差。
3) 站台高度H,为站台面至轨面高度。
4) 站台距离W,为站台边缘至线路中心线距离(若遇站台边缘有橡胶条即W为橡胶条边缘至线路中心线距离)。
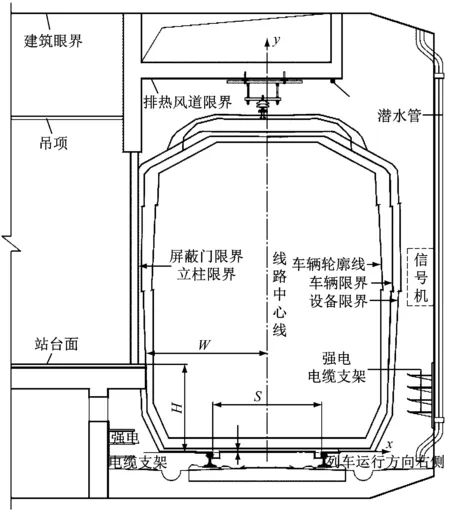
图2 地铁站台横断面示意图
3 检测仪机械结构设计
站台限界检测仪三维仿真设计结构如图3所示。整机呈三角结构,充分利用三角形三边定理定位摄像机与激光器的工作距离,并将激光发生器、工业摄像机、倾角传感器、电源模块等集成在机盒内部,实现一体化;通过机械公差配合,采用可拆卸的方法,实现整机的便携性。整机具有水平调节功能,测量基准唯一性,兼具防水、防摔、散热和保护传感器功能。
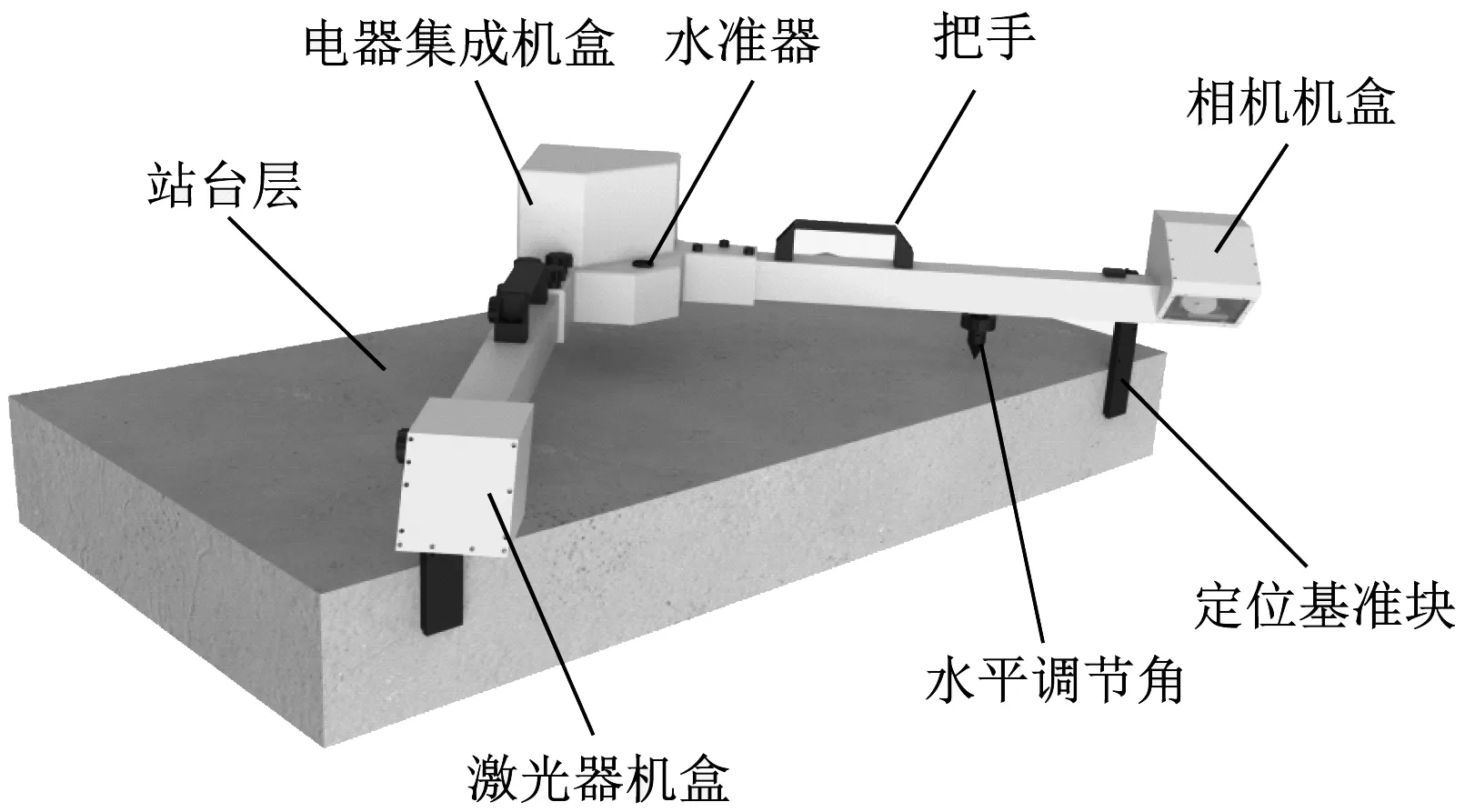
图3 检测仪三维仿真设计结构图
4 检测仪关键技术研究
4.1 近景斜角大范围摄像机标定模型
根据测量原理,整个检测仪需要各传感器之间工作距离尽可能小,而钢轨与站台位置相距较大,故需要建立一个近景斜角大范围摄像机标定模型,以解决检测仪的标定问题。如图4所示,以标定板左下角为标定板的世界坐标系xw、yw、zw,使标定平面在世界坐标系zw=0的平面上,并和激光器发射平面重合,利用摄像机拍摄标定区域进行标定,此时摄像机、钢轨、激光器三者之间的三维几何关系标定在一个具有已知坐标点的二维平面中,即可计算出线路中心线的坐标参数值。
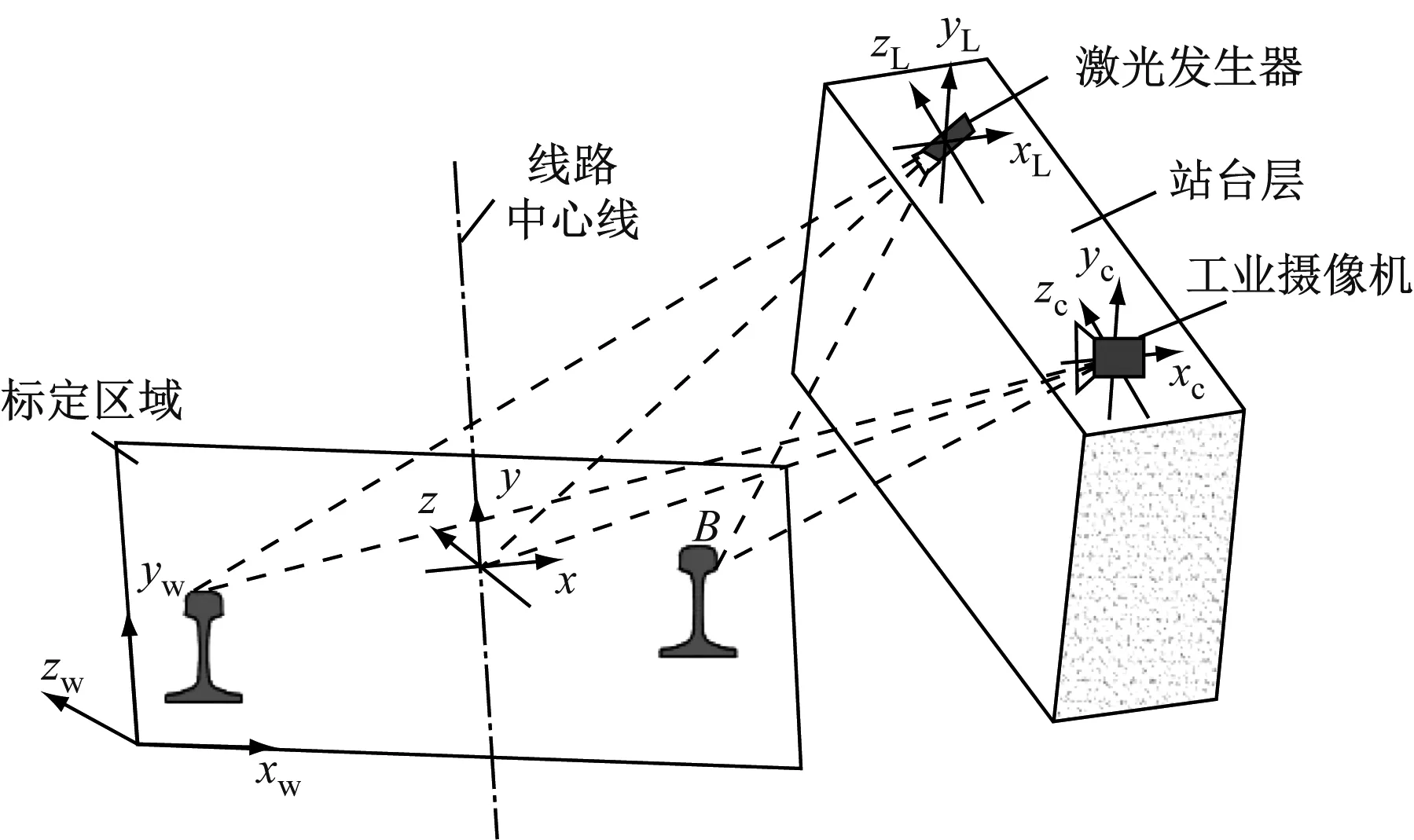
图4 摄像机标定模型
对于近景斜角大范围拍照测量的检测仪来说,镜头成像的畸变较大,使图片上每点的像素当量都不相同,因此很难直接用数学模型来求解标定参数。因此,设计了一套基于基准点匹配的方法来实现近景大范围拍照测量的标定。通过摄像机拍摄具有已知坐标距离的大型多阵列圆标定板,进行基准点的提取与匹配,完成检测仪的定标,检测仪标定流程如图5所示。
基准圆点提取的精确性直接影响检测仪的标定精度,因此是检测仪标定最重要的一步。对于椭圆形图像中心的提取,目前大多数采用椭圆参数拟合的方法[5-6],或者是利用椭圆的边界信息寻找椭圆的公切线进行中心点的提取;但对于多阵列圆的标定板,其标定范围广、光照不均匀,再加上镜头畸变的影响,利用这些方法很难直接提取出椭圆的中心像素点。针对检测仪的标定提出利用区域生长重心法提取基准点,将区域生长法和灰度重心法相结合,通过粗定位寻找每个基准圆的种子点进行区域生长。若n为基准圆区域内所有满足生长准则的像素点个数,T为所选取的灰度阈值,f(x,y)为基准圆区域内某一种子点邻域像素的灰度值,当:
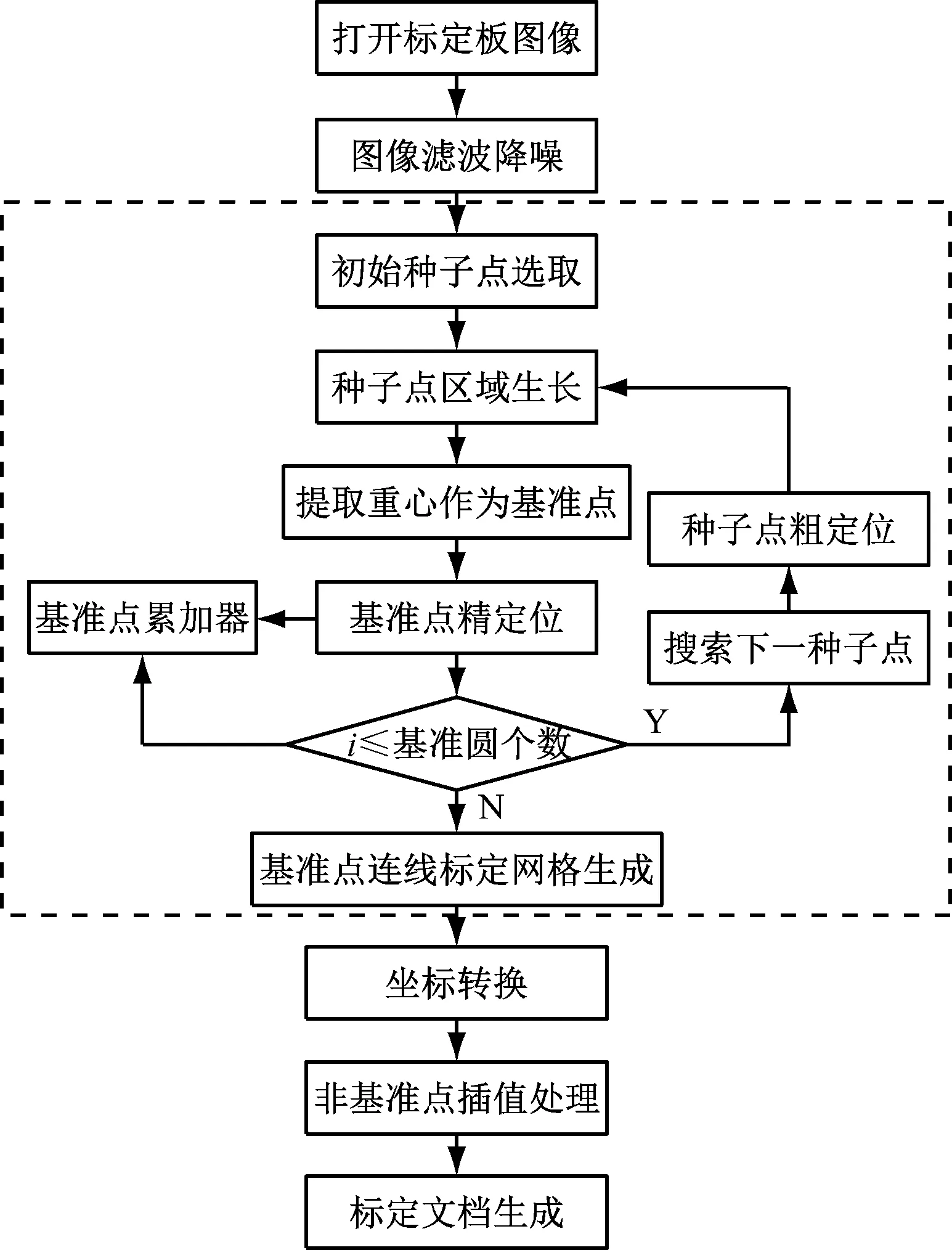
图5 检测仪标定流程
像素点拒绝进入生长区域,完成区域分割。然后利用灰度重心法提取生长区域的重心作为基准点,若u0、v0为所求基准点重心坐标,则:
通过遍历所有基准点,达到对大型多阵列圆标定板上基准点的提取。
4.2 检测仪参数计算模型
检测仪标定完成并通过图像处理算法解析出目标曲线,捕捉到各像素点坐标,检验仪标定好之后需要对站台限界几何关系参数进行计算。计算模型如图6所示。
1) 将所测图像匹配在已标定的x、y二维平面坐标中,由于钢轨下颚端点不产生磨耗,因此检测的基准就以左轨内侧下颚端点A和右轨外侧下颚端点A1为不变的基准点,通过B和B1点计算侧边斜率,使其与定标的标准钢轨轨头下颚两端点重合,重合点即为A、A′、A1、A1′。

3) 沿钢轨中心线OP、O1P1,在中心线O点向下16 mm处取C、C1点,通过C点垂直于钢轨中心线作直线交钢轨侧面于D、D1点,并根据轨头宽度计算出D2点,利用二维平面两点距离公式则S=DD2。
4) 根据地铁站台标准限界定标原理,分别换算出站台边缘(橡胶条边缘)距轨道中心线距离W,站台面距钢轨顶面距离H。
5 试验结果及分析
为了进一步检验检测仪的测量误差、精度以及使用性能,选取某地铁车站的下行车站25个站台门进行测量。由于地铁站台边缘都安装有橡胶条,所以现场做测试的站台距离为轨道中心线至橡胶条边缘的距离。站台限界检测仪与轨道尺(精度±0.5 mm、站台尺(精度±1 mm)采集同一横断面的各点数据作对比,其轨距、站台距离和站台高度的测量值及误差分析如图7所示。

c) 站台高度测量值及误差分析
图7 轨距、站台距离和站台高度测量值及误差分析

