面向无人驾驶的边缘高精地图服务
2019-08-19唐洁刘少山
唐洁 刘少山


摘要:高精度地图作为无人驾驶应用中辅助驾驶的重要手段,在高精度定位、辅助环境感知、控制决策等方面发挥着重要作用。边缘计算将计算、存储、共享能力从云端延伸到网络边缘,使用“业务应用在边缘,综合管理在云端”的模式,非常适合于部署更新频率高、实时服务延迟低、覆盖面积广的高精地图服务。结合众包的边缘地图服务已经成为高精地图更新的主要方式,有着重要的应用前景。
关键词:高精地图;无人驾驶;边缘计算;众包
Abstract: High-precision map plays an important role in autonomous driving, and it is the important foundation for high-precision positioning, environmental perception and control decision. Edge computing extends computing, storage and data sharing from cloud to network edge thus it is very suitable for deploying high-precision map services. With the mode of "deployment in edge, management in cloud", edge high-precision map service can provide high update frequency, low real-time service delay and wide coverage area. Combined with crowdsourcing, edge high-precision map has become the applicable and promising solution for low-cost and high-precision map updating.
Key words: high-precision map; autonomous driving; edge computing; crowdsourcing
无人驾驶作为目前人工智能行业最受关注的应用场景之一,担当着革新汽车行业甚至是交通运输业未来的重要使命。无人驾驶能够真正地解放人类双手,提高行车安全,通过更普及的运力共享,在缓解交通拥堵的同时可大大地减少对环境的污染。随着无人车的普及,无人驾驶将成为未来智慧公共出行的主要方式,是未来智慧城市的重要联结之一[1]。
在无人驾驶应用中,高精地图是其必不可少的实现基础。高精地图是对物理世界路况的精准还原,通过道路信息的高精度承载,利用超视距信息,和其他车载传感器形成互补,打破车身传感的局限性,实现感知的无限延伸。以底层的高精度地图数据为基础,在此之上叠加动态交通数据,通过高速通信完成交通信息的实时更新以及驾驶预警推送,为无人驾驶行车决策提供强有力的指导[2-3]。
相比于传统的电子地图,高精地图具有数据高精度、信息高维度以及高实时性的特点。随着感知范围的延伸和传感精度的提高,高精度地图有能力构建更精确的定位、更广范围的环境感知、更完备的交通信息,从而为无人驾驶提供感知、定位、决策等多种支持[4-5]。高精度地图不仅仅包含对道路静态元素10~20 cm厘米精度的三维表示,如车道线、曲率、坡度和路侧物体等,还包括了驾驶环境中各种动态信息,如车道限速、车道关闭、道路坑洼、交通事故等。此外,高精地图还发展出个性化驾驶支持,包括各种驾驶行为建议,如最佳加速点及刹车点、最佳过弯速度等,以提高无人驾驶的舒适度。
目前,全球图商以及无人驾驶车商,如百度、Google、高德、HERE、TomTom等已经组建了自有专业地图采集车队,通过配置有摄像头和激光雷达等设备的高精度地图采集车扫描获得街景图像数据和3D激光点云数据,经过后台的自动化建图流程,结合人工纠错与标注,最终形成多层次地图数据叠加的高精度地图,并进行发布。然而,自建专业采集车队极其昂贵、维护成本开销大且覆盖与更新面积有限,难以实现高精度地图生产的实时更新或修复自愈。地图众包是高精度地图生产与服务提供的新方向。利用(半)社会车辆在行驶过程中完成传感数据采集,通过边缘计算节点的数据清理、聚合和压缩等优化手段,可以将抽取过的关键感知数据推送至云端,在利用云端的强大算力使用多源数据完成对地图数据的更新,最后再把增量更新与动态实时交通存储在边缘缓存,根据车辆的驾驶场景,完成对高精地图数据的推送与预取。由此可见,边缘高精地图服务是自动驾驶在边缘计算场景下的一大典型应用,在减少成本开销的同时,实现覆盖更为广泛的、更高频的、更实时的地图数据服务。
通过众包机制,利用多车传感在边缘计算端与云端进行协同,实现高精度地图的构建与实时更新;并通过边缘缓存向车辆实时发布高精度地图的動态层数据与静态更新,以辅助车辆的无人驾驶。这一未来无人驾驶典型应用需要解决3大方面的问题:(1)如何以边缘节点为中心,根据边缘智能感知的车辆动态分布进行感知任务分配,并对汇集的群智信息的时空有效性与数据质量进行评估和控制;(2)多车辆传感数据如何在边缘节点自动化地进行过滤、聚合、协商,以得出对交通态势的动态描述,抽取出对静态更新的一致性感知结果,其中包括如何通过有序协作对感知数据进行动态融合,从而提高感知准确性、全面性,减少信息冗余度;(3)根据感知数据的时空特征和车辆的分布规律,如何利用边缘环境中具有时空约束的服务数据缓存与分发,把确认后的地图更新与实时交通状况传播到其他相关车辆中,为无人驾驶服务提供细粒度、准确、高时效的数据基础。
1 高精地图
高精地图是高精度、高维度、高实时的地图数据综合。在数据精度上,相比电子地图米级的数据误差,高精地图的相对精度误差不超过20 cm。相比电子地图中简单的道路模型,高精地图包含了道路标志、车道边界、车道坡度、弯道曲率等多维度的丰富信息。同时,通过与车联网以及车到万物(V2X)等技术的结合,高精地图还将更新实时交通信息以及天气状况等。所有这些路况信息是高精地图辅助实现 L3~L5级无人驾驶的基础。如图1所示,高精度地图在无人驾驶中发挥着重要作用。通过比对车载传感环境信息与高精地图信息,可以得到车辆在地图中的厘米级精确位置,实现车辆的高精度定位[6]。利用先验知识,高精地图信息可以辅助环境感知,从而降低车载环境感知的难度[7]。高精度地图现已精确到车道模型,可以预知前方多种道路信息,实现提前减速和避让,完成更有效的局部驾驶规划。通过5G等通信手段,结合V2X交互支持,可以实现超距离路况感知与预警,完成更智能、更实时的全局驾驶规划。
1.1 高精地图数据组织
高精度地图作为自动驾驶的必要支撑,在维持底层车道数据精确性的同时,必须具备进行动态路况信息实时更新的能力,并发展出基于车主不同驾驶习惯的个性化驾驶支撑能力。因此,高精地图需分为2个层级:最底层是静态高精地图层,需提前进行装载;上层是动态高精地图层,在行车过程中不断更新。
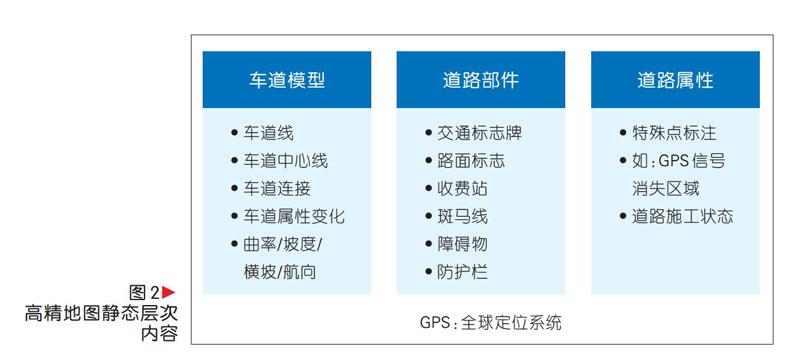
为了提升存储效率和可读性,静态高精地图在存储时又继续划分为矢量层和特征层。特征地图是对路面信息的准确刻画,主要驱动于高精度定位的需求,能够很好地完成地图道路匹配与定位。矢量地图是在特征地图基础之上进一步的抽象、处理和标注。它的容量更小,并能够通过其中的路网信息完成点到点的精确路径规划,这是高精度地图使能的一大途径。如图2所示,矢量层包含车道模型、道路部件、道路属性数据。这些语义元素被简化和抽取出来,补充到几何构建的道路结构中,形成新的矢量地图数据。其中,车道模型中包含了车道线、车道中心线、车道属性变化等信息,可以辅助车辆完成横向定位,并且执行交通规则,比如指导车辆在虚线区域内进行并线,在车道分离点前完成变道。通过对比车载传感数据与交通标志牌等道路部件信息,可以修正车辆纵向定位和航向。即便在没有检测到任何道路特征的情况下,也可以通过高精地图的航位推算进行短时间的位置推算。车道模型中曲率、坡度、航向、横坡等数学参数,可以决策车辆准确的转向、制动、爬坡等行为。这部分数据因为道路翻新和维护出现频繁变化,需要有效地利用边缘群智感知进行更新。
动态高精地图层构建在静态层之上,增加了道路拥堵情况、施工情况、交通事故、交通管制情况、天气情况等动态交通信息。这些动态要素通过5G等通信手段在车车之间、车与边缘节点之间、多边缘节点之间进行收集、处理与发布,将及时地反映在高精地图上以辅助决策确保无人车行驶安全。
1.2 高精地图传感器类型
高精地图的生产依赖于多个传感器数据的融合。高精地图数据采集时使用的传感器种类不一定与无人驾驶时使用的传感器相同。为保证L4或者L5无人驾驶的要求,高精地图生产需要的传感器主要包括图3中的几种类型。
· 光学摄像头。通过车载摄像头,可以捕捉车身周围交通环境的静态信息,通过对图片中关键交通标志、路面关键信息的提取,来完成对地图的初步绘制。目前,基于图像的深度学习技术发展远超过基于3D点云的深度学习,对于各种地物的提取具有较高的精确率和较低的召回率,可以非常清晰地提取道路边线和交通标识等信息。这些都是摄像头作为高精地图感知手段的重要优势。然而,摄像头传感要求外部环境光线充足,因此采集工作只能在白天进行[8]。
· 陀螺仪(IMU)。IMU配备有6轴运动处理组件,包含了3轴加速度和3轴陀螺仪,分别检测在上下、左右、前后这3个方向上的加速度和角速度信息,以此解算出物体的姿态,提供短时内较为准确的定位。但是,从加速度推算出运动距离需要经过2次积分,随着时间漂移所产生的误差将不断增大。因此,仅依赖IMU无法完成长时间的车辆位置精确预测,高精地图的生产往往需要精度较高的IMU,所使用的IMU价格一般在数万到几十万之间[9]。
· 轮测距器。车辆的前轮通常配备了轮测距器,分别记录左轮与右轮的总转数。通过分析每个时间段内左右轮的转数、向左右转动的角度等,可以推算出车辆前进的距离和位置。但是,不同的地面材质(如冰面与水泥地)上的转数对距离转换存在偏差。所以单靠轮测距器并不能精准预测无人车位置,但对于高精地图的制作不是必须的传感器。
· 全球定位系统(GPS)。GPS作为使用最广的定位系统,在无人驾驶定位和高精地图制作中都发挥着举足轻重的作用。GPS使用4颗或更多卫星的位置(储存在星历中)计算出地面接收器与每颗卫星之间的距离,然后利用三维空间的三边测量法推算出车辆的位置。民用GPS的单点定位精度一般在米级,差分GPS通过增加一个参考基站的方法可提高定位精度至厘米级[10]。但是在复杂环境中,一旦出现信号阻挡的情况,GPS多路径反射(Multi-Path)的问题会导致几十厘米甚至几米的误差。同时GPS的定位频率较低,最高仅为10 Hz,目前通常使用GPS和IMU连接组成惯性导航系统,利用低频率的GPS数据校准高频率但易漂移误差的IMU数据,进而完成相对高频率、高精度的融合数据。
· 激光雷達(LiDAR)。激光雷达通过向目标物体发射一束激光,然后根据接收-反射的时间间隔确定目标物体的实际距离。根据距离以及激光发射的角度和感光测量数据,通过简单的几何变化即可推导出物体的三维空间位置信息和光强度信息。使用激光雷达能够快速获得道路及周边环境的三维点云数据和光强度信息,完成对检测到物体的初步判断。激光雷达的工作条件基本不受时间影响,白天黑夜都可以工作。但是,激光雷达对环境要求较高,在大雨、浓烟、浓雾、大雪等恶劣天气里都会受到很大的影响。同时,激光雷达并不能识别和理解交通标志牌、信号灯等内容,需要借助光学摄像头来捕捉并提取这部分信息。最重要的是,激光雷达价格昂贵,尤其是高线束激光雷达的量产率比较低,价格居高不下,导致激光雷达的部署成本过高,难以落地。
· 多传感器融合。如表1所示,单一传感器很难全天候工作,并且在实际应用中不同传感器有着不同的特性。比如,GPS传感器能够直接测量出每个时间点车辆的全局位姿,但是这些直接测量结果通常不会很精确。激光雷达和摄像头的每次采样测量结果均是在局部坐标系,但是两者包含了丰富且准确的局部测量信息,很多相对的位姿信息可以被抽取出来丰富地图的语义。因此,在制图中均采用多传感器融合的方法。多传感器数据融合就是把所有的车载传感器数据标定到统一的车辆坐标系(如x轴向前,y轴向左,z轴向上)上,并尽可能利用各种离散时空数据,计算出车辆每个时间点在全局坐标系下的三维位姿。一旦有了全局车辆的位姿信息,就可以完成各类传感数据局部测量结果融合。
2 高精地图的制作
如图4所示,高精度地图的构建由数据采集、地图生产、人工验证、地图更新发布4个过程组成。
2.1 数据采集
目前主流的高精度地图数据采集可以分成3大阵营。其一,自由专业采集体系是图商利用自建的高精专业采集车进行上路采集。其二,行业采集生态是利用如物流车、出租车等车辆上的GPS、摄像头等回传实时的道路轨迹和路况信息,这也是现在导航地图中使用的交通动态信息采集方法之一。其三,众包模式。在自动驾驶时代,普及后的每辆无人驾驶车上的激光雷达、摄像头等传感器无时不刻都在采集道路信息。这些传感信息可以被用来完成对高精地图的更新发现与实施。边缘地图更新就是利用众包在提供边缘地图服务的同时,收集服务车辆的传感数据,利用边缘智能完成对地图多层级数据的迭代。
第一阵营的代表是谷歌、百度等,他们拥有专业的地图测绘车车队,可完成封闭的集中式制图。目前,谷歌汽车已经完成了累积超过1 931 212.8 km的无人驾驶高精度地图测绘[11]。然而专业的地图采集车造价非常昂贵,成本达到800万元,相对精度在10 cm之内,这显然是单纯依靠摄像头提供视觉方案的众包模式所无法实现的。第三阵营的代表是 Mobileye。Mobileye借助不同品牌大量级的车载摄像头获取数据来源,并针对自动驾驶情景,将重点放在路上的各种导流标志、方向标识、信号灯等,依靠这些建立的路标,从微观上在行驶过程中为车辆提供指引。
未来在无人驾驶发展和应用中,3种模式将长期共存。地图采集车高昂的造价限制了地图数据大范围、高频率的采集更新,因此这部分数据将作为高精地图基础数据。在此之上,物流车等半社会化商用车和私用车将以众包模式实现对高精度地图数据的补充和更新;而边缘地图服务正是基于此种应用需求,在网络侧完成对众包车辆对道路多源描述的整合。
2.2 地图生产
地图生产主要涉及位姿修正、数据预处理、位置检测和语义生成4个环节[12]。这一过程将会利用激光点云识别技术、深度学习图像识别技术以及大数据的处理能力等实现多种传感数据的自动融合、识别、语义标注等。一般来说,采集的设备越精密,采集的数据越完整,需要算法修正的不确定性就越大,像Google、HERE等公司已有低分辨率的母图做基础,只需要叠加更多立体图层和语义层。相反,如果采集的数据误差越大,就越需要依赖算法弥补数据的缺陷,对算法要求更高。在边缘地图服务中,来自不同车辆的传感信息本身就存在着各自的误差。同时,不同的传感数据描述通常是对同一事件的抽象,这就对传感数据的边缘抽象、融合、处理水平提出了较高要求。
2.3 人工验证
人工验证这一环节由人工完成。自动化验证的数据还不能达到百分百的准确,需要人工再进行最后一步的确认和完善。
2.4 地图更新发布
地图更新发布主要针对静态地图层的道路的修改和动态地图层的突发路况、交通事故等。最终形成的地图更新可在云平台决策之后经由边缘节点和车间通信进行内容的分发。
3 边缘场景下的高精地图服务
由于高精度地图对数据更新提出了很高的要求,实时更新和实时同步是高精度地图应用过程中绕不开的2大问题。为了解决这2点,云平台是高精地图所不可或缺的。但是,云平台在高精地图中的直接应用面临2个难点:(1)实时更新、数据同步的困难;(2)云平台制图能力的有限性,包括但不限于数据收集、运算、交互、分发等。因此,高精地图生产与服务更需要从云-边缘-端的角度推进,在分散云中心计算压力的同时,还要强化云-边缘-端之间的联系以及网络侧本身的计算、收集与发布能力。
因此,从高精地图的产品形态和服务方式的角度,通过边缘计算服务对高精地图数据进行实时更新与分发是一种可行的方式。根据边缘计算产业联盟的定义,边缘计算是在靠近设备或数据源头的网络边缘侧,融合网络、计算、存储、应用核心能力的开放平台,就近提供边缘智能服务,以满足行业数字化在敏捷联接、实时业务、数据优化、应用智能、安全与隐私保护等方面的关键需求[13-14]。基于边缘计算的高精地图服务包括地图生产和地图发布2部分内容。边缘地图生产服务通过实时收集各车的行驶数据来增强交通时态的收集密度,扩充道路情况信息的感知范围,并通过对感知数据的预处理实现有效的内容提取和无关语义去除等。边缘地图发布服务通过边缘缓存能力进行地图数据发布,将大大地缓解数据更新的缓存开销和到达延迟,实现更貼近用户的数据服务和行车预警。
高精地图对于地图数据处理有着特殊的要求:一是低时延,在车辆高速运动过程中,要实现动态地图中的碰撞预警功能,通信时延应当在4 ms以内;二是高可靠性,高精度地图服务于无人驾驶,相较于普通数据处理,高精地图的传感数据处理需要更高的可靠性。与此同时,车辆的高速运动以及可预见的传感数据量爆发,对于时延和可靠性的要求也将越来越高。边缘计算在局域内即可实现对实时传感数据的聚集、分析与抽取,一方面将分析所得结果以极低延迟(通常是毫秒类)传送给区域内的其他车辆,一方面将抽取后的信息推送至云端,以便地图云完成对更新的决策。通过利用边缘计算的位置特征,地图数据就可实现就近存储,因此可有效降低时延,非常适合于动态高精地图中防碰撞、事故警告等时延标准要求极高的业务类型。同时,边缘计算能够精确地实时感知车辆移动,提高通信的时效与安全。在此方面,德国已经研发了数字高速公路试验台来提供交通预警服务,该试验台用于在长期演进(LTE)环境下在同一区域内进行车辆预警消息的发布[15]。相比集中式高精地图服务,边缘高精地图服务拥有以下的特性:
· 低时延。边缘高精地图服务利用V2X 等近距离通信技术来提升行车安全与交通效率。目前边缘节点有效范围内的主要通信方式是专用短程通信(DSRC)、蜂窝通信(LTE-V2X)、5G-V2X。5G网络延迟可以达到毫秒级,峰值速率可达10~20 Gbit/s,连接密度可以达到100万/千米2,可保障大规模行车场景下的4 ms碰撞预警时间。这使得驾驶反馈更加迅速,改善了用户安全与用户体验。
