不确定环境下考虑风险厌恶的生产-分销网络优化模型及试验设计
2019-08-19邱若臻
邱若臻,刘 健,于 悦,朱 珠
(1.东北大学工商管理学院,辽宁 沈阳 110169;2.辽宁大学信息学院,辽宁 沈阳 110036)
1 引言
生产-分销网络优化设计是供应链战略和战术运作中的关键决策问题,也是企业获取竞争优势的一个重要因素,广受业界和学术界的关注[1-4]。传统的生产-分销网络设计问题通常仅考虑需求的不确定情况,以此建立基于期望利润或期望成本的随机规划模型。随着竞争环境和企业运作情况的复杂多变,决策者面对的不确定因素越来越多,这些因素将直接影响生产-分销系统的效率和成本。Simangunsong等[5]总结了供应链中存在的14种不确定因素,指出任意不确定因素都可能导致严重的绩效损失。在不确定性处理方面,许多学者采用情景方法进行描述,建立基于期望成本或期望利润的数学规划模型[6-7]。Yang Guoqing等[8]在考虑运输成本和市场需求不确定的条件下,采用期望成本最小方法研究了多阶段多产品的四级闭环供应链网络设计问题。Pasandideh等[9]在知道需求部分信息的条件下,通过最小化期望总成本解决了多产品多阶段的三级供应链网络设计问题。赵霞等[10]针对多级农产品供应链,采用情景方法描述不确定性,建立了以降低不确定性风险和总成本为目标的集成生产设施选址、产能决策和物流网络运输模式选择的混合整数规划模型。由于在处理不确定因素方面具有简易高效的优点,情景建模方法被广泛用于供应链网络设计问题。
在实际运作环境中,决策者采用的运作策略并不总是与期望成本或期望利润的策略一致,通常表现出一定的风险厌恶特征。Simangunsong等[11]指出不确定性主要用于描述不知道确切产出的状态,而风险则描述了这一不确定性带来的不利情况。为了度量和规避不确定性所导致的风险,在进行网络设计模型构建时通常引入相应的风险测度方法,用于度量由不确定性导致的绩效风险[12]。常用的风险度量方法有均值-方差、风险值(Value-at-Risk, VaR)和条件风险值(Conditional Value-at-Risk)[13-14]。由于条件风险值满足一致风险测度所要求的单调性、次可加性,广受学者关注[15]。例如,Xu Chunming和Zhao Daozhi[16]针对风险厌恶型零售商,采用CVaR风险度量方法,研究了使用RFID技术和未使用RFID技术下的零售商供应链库存控制问题。Madadi等[17]研究了风险中立和风险厌恶下的药品供应网络设计问题,建立不同风险厌恶水平下的供应网络设计模型。由于CVaR只关注下行风险,从而导致决策目标过于保守。基于此,一些学者进一步采用均值-风险准则来刻画决策目标。例如,Xu Minghui和Chen[18],Xu Minghui和Li Jianbin[19]将均值-CVaR应用到供应链库存控制模型之中,分析了是否考虑缺货损失的两种供应链最优订货决策。
在上述研究基础上,本文综合考虑生产和需求不确定性,研究由工厂、分销中心和终端市场构成三级生产-分销网络优化设计问题。特别地,采用情景方法对不确定性进行建模,并采用CVaR对不确定性导致的绩效风险进行度量,建立了基于均值-CVaR准则的生产-分销网络设计模型。针对情景数过多导致的模型求解难度问题,采用情景缩减技术进行了情景筛选。最后,通过数值案例分析了相关系统参数变化对网络绩效和结构的影响,并进一步利用回归试验设计方法检验了系统参数对网络绩效的影响程度。
2 基本问题描述
考虑如图1所示的生产-分销网络优化设计问题。该网络由位置待选的I个备选工厂、J个备选分销中心和位置固定的K个终端市场组成。其中,工厂生产产品,但产品产量受生产能力、存储容量和市场需求的限制。为了满足市场需求,产品将根据需要从工厂运往分销中心,经分销中心抵达终端市场。特别地,图中虚线表示每个终端市场只能接收来自一个分销中心的产品。
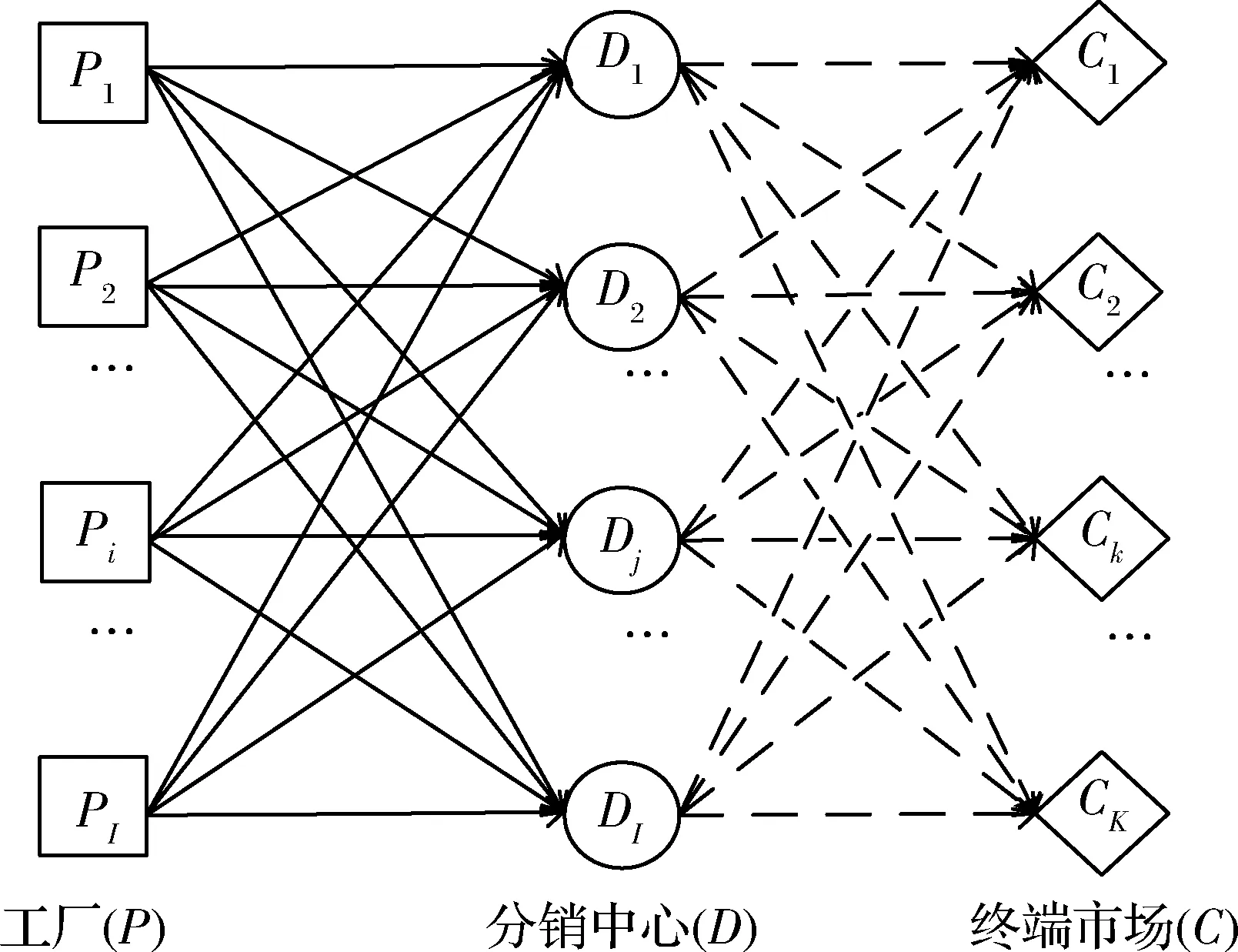
图1 生产-分销网络结构示意图
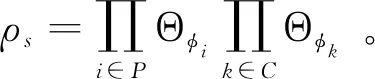
在该生产-分销网络中,决策者面临不确定生产状态φi(i=1,2,…,I)和不确定市场需求状态φk(k=1,2,…,K)。其中,生产状态φi包括无故障(φi=0)和有故障(φi=1)两种状态,各状态发生的概率为Θφi,Θφi=0+Θφi=1=1;市场需求状态φk包括低(φk=L)、中(φk=M)、高(φk=H)三种情况,各需求状态发生的概率为Θφk,Θφk=L+Θφk=M+Θφk=H=1。由于工厂在有故障状态下会产生不合格品,决策者为减少额外损失,需要在工厂实施监测,并将监测出的不合格品丢弃。为描述不同状态下的不确定参数,采用情景方法对生产和需求的不确定性进行描述。需要指出的是,在生产-分销网络设计决策过程中,包括两种类型的决策变量:设计变量和控制变量。设计变量需要在网络构建的初始阶段确立,主要涉及网络结构决策,包括工厂和分销中心的选址、分销中心到终端市场是否供应产品等;控制变量是在运营过程中获得与未来阶段不确定性有关的信息后作出的决策,包括不同情景下的产品产量、从工厂到分销中心各个路线的运输量、工厂是否实施监测等。因此,本文提出的生产-分销网络设计模型属于两阶段规划问题。
3 生产-分销网络优化模型建立
3.1 符号定义
(1)集合和下标
P工厂集合,下标为i∈P={1,2,…,I}
D分销中心集合,下标为j∈D={1,2,…,J}
C终端市场集合,下标为k∈C={1,2,…,K}
Ω 情景集合,下标为s∈Ω={1,2,…,S}
(2)参数
fi工厂i的固定运营成本
gj分销中心j的固定运营成本
mi工厂i的单位生产成本
ej分销中心j的单位作业成本
λij从工厂i到分销中心j的单位运输成本
vjk从分销中心j到终端市场k的单位运输成本
oij从工厂i到分销中心j所运输的不合格品的处罚成本
γij从工厂i到分销中心j所丢弃的不合格品的丢弃成本
ni在工厂i实施监测的固定成本
δjk从分销中心j到终端市场k的单位缺货成本



N很大的正数
Gi工厂i的生产能力
Kj分销中心j的存储能力
(3)决策变量
Xi0-1变量,如果工厂i被选择,则为1,否则为0
Yj0-1变量,如果分销中心j被选择,则为1,否则为0
Hjk0-1变量,如果分销中心j对市场k供应产品,则为1,否则为0






3.2 基于期望成本的生产-分销网络设计模型
针对风险中性的决策者,建立基于期望成本的生产-分销网络设计模型。其中,涉及到的相关成本如下:
工厂和分销中心的选择及固定运营成本:
(1)
情景s下工厂的生产成本和分销中心的处理成本:
(2)
情景s下工厂到分销中心和分销中心到终端市场的运输成本:
(3)
情景s下工厂实施监测的成本、丢弃不合格品的成本和运输不合格品的处罚成本:
(4)
情景s下终端市场的缺货成本:
(5)
因此,情景s下的生产-分销网络设计问题总成本为:
(6)

(7)
(8)
(9)
(10)
∀i∈P,j∈D,s∈Ω
(11)
∀i∈P,j∈D,s∈Ω
(12)
(13)
(14)
(15)
(16)
(17)
∀i∈P,j∈D,k∈C,s∈Ω
(18)
Xi∈{0,1}, ∀i∈P
(19)
Yj∈{0,1}, ∀j∈D
(20)
(21)
Hjk∈{0,1}, ∀j∈D,k∈C
(22)
其中,约束(8)和(9)表明工厂i和分销中心j的产量和存储量不能超过其最大能力约束;约束(10)表明实际运输的不合格品数量和已丢弃的不合格品数量的总和应该等于所有不合格产品的数量;约束(11)表明如果在工厂i实施监测,则实际运输的不合格品数量应小于等于未被监测出的不合格品数量;约束(12)表明如果在工厂i实施监测,则被丢弃的不合格品数量应小于等于已被监测出的不合格品数量;约束(13)表明只有在工厂实施监测后才会发现并丢弃不合格品;约束(14)表明只有工厂被选择之后才能实施监测;约束(15)表明工厂i到分销中心j运输的产品数量不少于分销中心j到终端市场k的运输数量:约束(16)、(17)表明一个终端市场只能接受来自一个分销中心的产品,且允许缺货;约束(18)确保相关决策变量的非负性。
3.3 基于CVaR的生产-分销网络设计模型
如前文所述,不确定性的存在通常会导致一定的绩效风险,这就需要采用相应的风险测度进行度量。本文中,考虑具有风险厌恶的决策者,并采用条件风险值进行风险度量。对于给定的生产-分销网络决策,其总成本π不高于阈值η的概率为:
ψ(π,η)=Pr{π≤η}
(23)
在给定风险厌恶水平α∈(0,1)下,网络成本的风险值为:
VaRα(π)=inf{η∈R∣ψ(π,η)≥α}
(24)
式(24)表明决策者的损失值将以不低于α的概率低于阈值η。根据Rockafellar和Uryasev[20],条件风险值定义为:
CVaRα(π)=φVaRα(π)+(1-φ)CVaRα(π)+
(25)

(26)
通过引入辅助向量τ=(τ1,τ2,…,τs,…,τS)T,问题(26)等价于:
s.t.τs≥πs-η,s∈Ω
τs≥0,s∈Ω
(27)
因此,基于CVaR的生产-分销网络设计模型可描述为:
τs≥0,∀s∈Ω
约束(8)-(22)
(28)
可以看出,当考虑CVaR风险度量准则时,生产-分销网络优化设计模型(28)仍是一个混合整数线性规划问题,因此可以高效求解。
3.4 基于均值-CVaR的生产-分销网络设计模型
期望成本模型由于过于强调成本,从而导致供应链在应对不确定风险时会变得更脆弱和易受影响;CVaR模型虽然考虑了风险厌恶型决策者在不同风险水平下的生产-分销网络设计,但由于只关注下游风险的损失,因此决策目标过于保守。实际当中,决策者在做出最优决策时通常不仅考虑成本,还关注存在的风险。基于此,进一步采用均值-CVaR准则衡量生产-分销网络运作绩效,优化目标描述如下:
min(1-μ)E[π]+μCVaRα(π)
(29)
其中,μ(μ∈[0,1])为悲观系数,μ越大,说明决策者越倾向于考虑绩效风险;μ越小,说明决策者越倾向于降低成本。式(29)体现了条件风险值和期望成本之间的权衡,因此,该决策准则下的最优策略满足帕累托最优。在式(29)基础上,基于均值-CVaR的生产-分销网络设计问题可描述为:
s.t. 问题(28)中的约束
(30)
可以看出,模型(30)仍是一个混合整数线性规划问题。当0<μ≤1时,目标函数刻画了决策者的风险规避行为。特别地,当μ=0时,等价于期望成本最小化问题,决策者将获得最小成本绩效;当μ=1时,等价于条件风险值最小化问题,决策者将获得最小风险绩效。然而,需要注意的是,当μ≠0时,决策者所能获得的绩效还受自身风险厌恶水平的影响。后文将进一步在数值计算结果基础上,采用回归正交试验设计方法检验悲观系数μ和风险厌恶水平α对网络绩效的交互影响。
如前所述,文中所建模型(7)-(22)、模型(28)以及模型(30)是两阶段随机规划模型。其中,第一阶段决策需在任一情景发生之前做出,主要涉及生产-分销网络的构建,即,工厂、分销中心和供货渠道的选择;在给定第一阶段决策下,第二阶段决策可延迟至当任一可能的情景发生时做出,主要涉及产品产量、从工厂到分销中心各个路线的运输量、工厂是否实施监测等。尽管决策顺序不同,但通过直接求解上述三种模型,可同时获得两个阶段的决策变量。
4 情景生成与缩减

minf
⋮
(31)

5 数值算例分析
(1) 三种模型下的网络绩效分析。通过求解期望成本模型(7)-(22),得最优生产-分销网络期望总成本为E[π]=15554703.71。通过求解CVaR模型(28),得不同风险厌恶水平α下的绩效结果如图2所示。由图2可知,随着风险水平α的增加,CVaR绩效随之增加,说明决策者的风险厌恶水平越高,越倾向于获得较高的CVaR绩效。特别地,
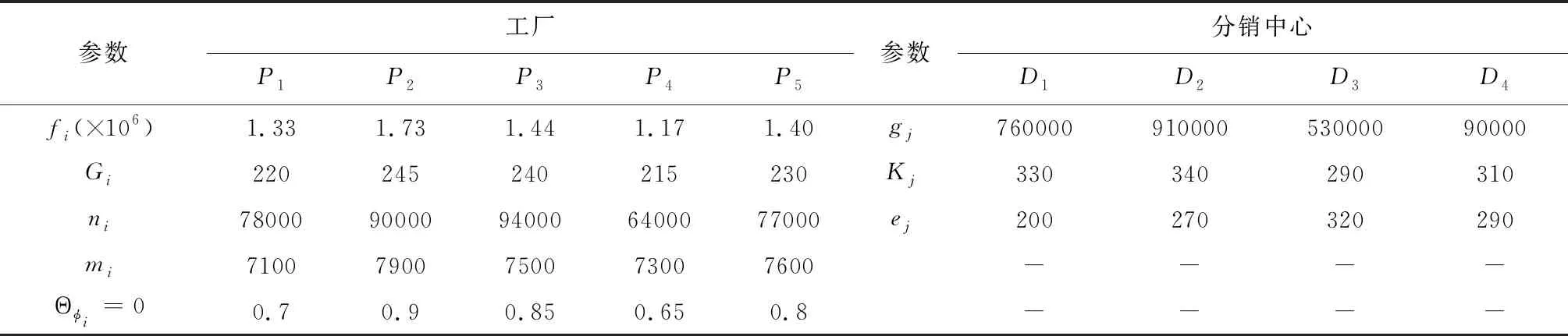
表1 工厂和分销中心的相关成本

表2 运输成本λij和vjk

表3 处罚成本oij和缺货成本δjk

表4 终端市场的需求φk及其概率Θφk
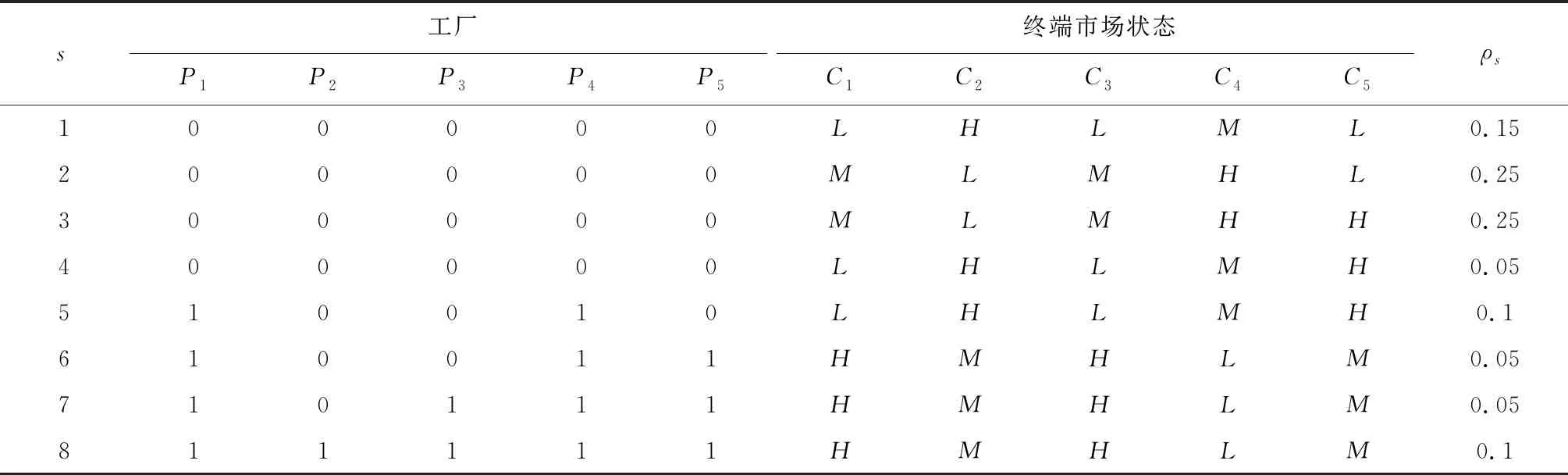
表5 情景缩减后的φi、φk及情景概率ρs
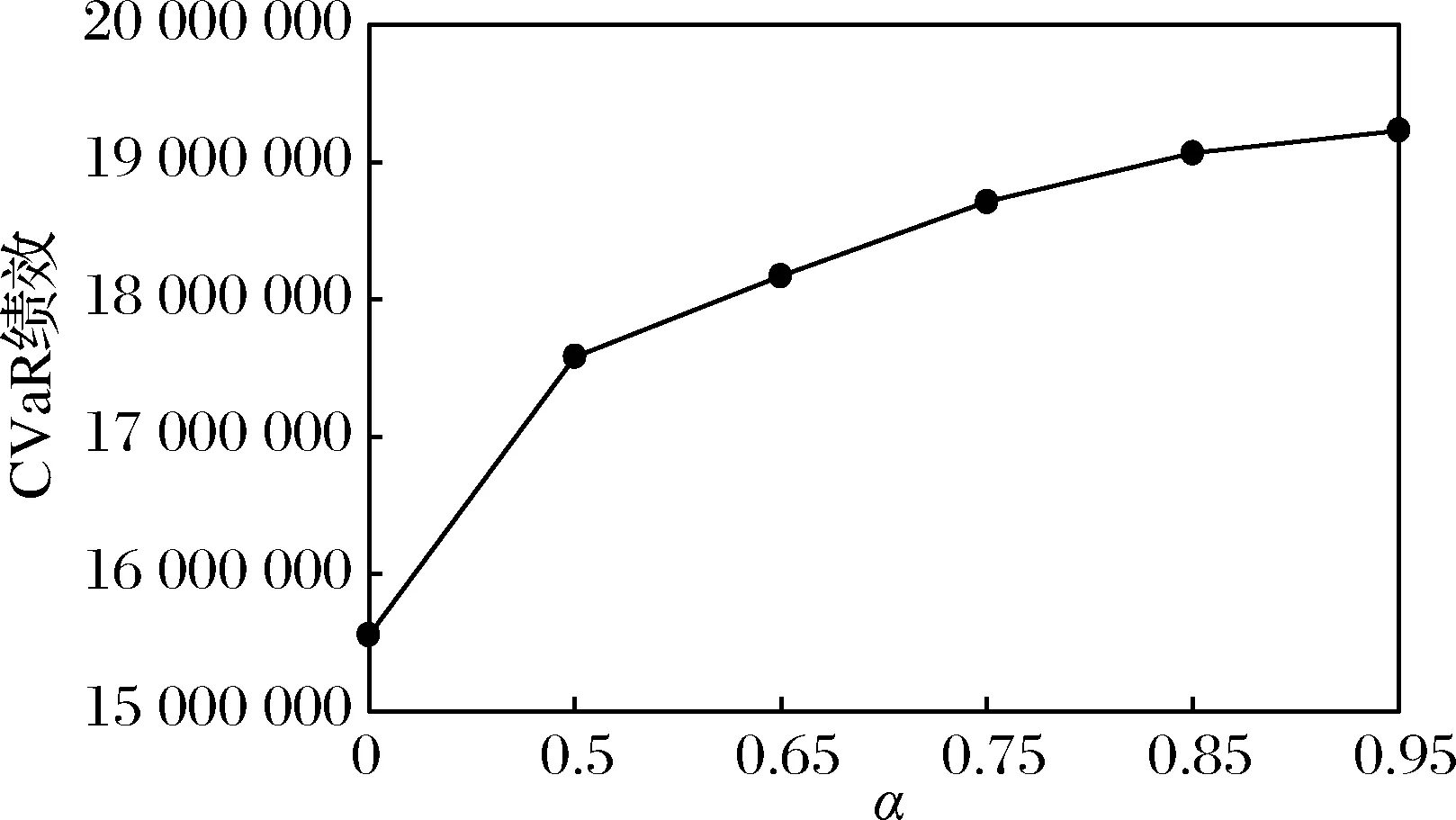
图2 不同风险厌恶水平下的CVaR绩效
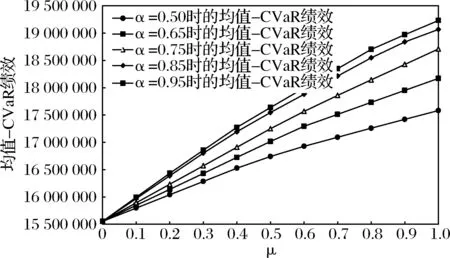
图3 不同μ和α下的均值-CVaR绩效
当α=0时,等价于期望成本模型,此时,CVaRα=0=E[π]=15554703.71。进一步,通过求解均值-CVaR模型(30),得不同悲观系数μ和风险厌恶水平α下的绩效结果如图3所示。由图3可以看出,悲观系数μ和风险水平α都对均值-CVaR绩效产生影响。当决策者风险厌恶水平α一定时,生产-分销网络的均值-CVaR绩效随悲观系数μ的增加而增加,这是由于μ越大,决策者会将更高的权重赋予CVaR表达式,而Rockafellar和Uryasev[21],CVaR绩效高于期望成本。因此,μ越大,CVaR绩效对均值-CVaR绩效的贡献就越大;特别地,当μ=0时,决策者只考虑期望成本而忽视风险,导致均值-CVaR绩效达到最小值(对应最优期望成本);当μ=1时,决策者只考虑条件风险值而忽视期望成本,此时的期望成本对均值-CVaR绩效没有影响,导致均值-CVaR权衡绩效达到最大值(对应最优CVaR绩效)。当悲观系数μ(μ≠0)一定时,均值-CVaR绩效随着风险水平α的增加而增加,这是由于决策者的风险厌恶水平越高,CVaR绩效越大,对均值-CVaR绩效的影响就越高。
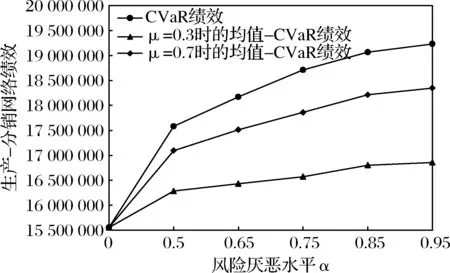
图4 不同α,μ下的CVaR绩效和均值-CVaR绩效
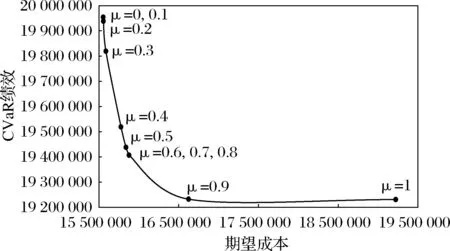
图5 均值-CVaR模型下期望成本和CVaR绩效随的变化
(2)CVaR模型与均值-CVaR模型对比分析。为进一步比较均值-CVaR模型与CVaR模型的差异,计算了μ=0.3和μ=0.7下,α在[0,0.95]范围内变动时的绩效水平,结果如图4所示。由图4可以看出,当仅考虑CVaR风险准则时,生产-分销网络绩效高于均值-CVaR准则下的绩效,这是由于CVaR模型比均值-CVaR模型在应对风险时更加保守,决策者为了规避风险而不得不增加成本。然而,随着悲观系数μ的降低,决策者的保守性下降,对应的成本风险绩效随之下降。由于式(30)满足帕累托最优决策准则,为了获得条件风险值和期望成本两个指标之间权衡的帕累托有效前沿,计算了风险厌恶水平α=0.95,μ在[0,1]范围内变动时的条件风险值和期望成本,从而得到帕累托有效前沿如图5所示。图5中曲线上的任意一点对应的决策都是帕累托最优的。图5同样表明,随着μ的增加,均值-CVaR模型越倾向于优化条件风险值,使得条件风险值降低,而对应的期望成本增加。由于条件风险值总是高于期望成本,因此,μ越大,条件风险值和期望成本的加权之和越大,即系统的总绩效越大,与前文结果一致。
(3)生产-分销网络结构分析。为观察均值-CVaR模型下的生产-分销网络结构,分别以α=0.95,μ=0.3和μ=0.7为例进行描述,算例中所涉及的产品数量均为所有8种情景下的期望值。
①当α=0.95,μ=0.3时,通过求解模型(30),得最优均值-CVaR绩效为16857145.64,选择的工厂为P1、P3和P5,生产的零配件数量分别为216、240和169单位,丢弃的不合格零配件数量分别为10、6和6单位;选择的分销中心为D1和D3,处理的零配件数量分别为325和278单位;分销中心D1到市场C1缺货量为7单位,D1到C4的缺货量为87单位,D3到C3的缺货量为2单位,D3到C5的缺货量为136单位。该算例下的生产-分销网络结构如图6所示,其中,线上数字表示相应节点之间的期望运输量。工厂在各情景下是否实施监测决策结果如表6所示,其中,数值1表明应对该情景下应对工厂实施产品质量监测。
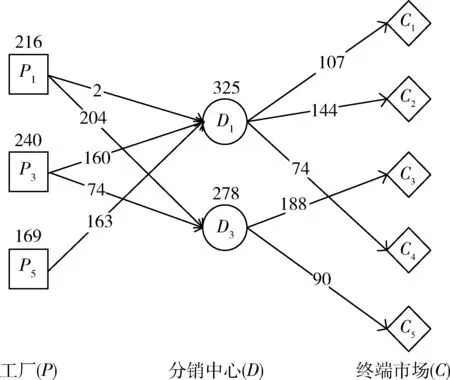
图6 α=0.95和μ=0.3时基于均值-CVaR的网络结构
②当α=0.95,μ=0.7时,通过求解模型(30),得均值-CVaR绩效为18348050.25,选择的工厂为P2、P3和P5,生产的零配件数量分别为170、240和227单位,丢弃的不合格零配件数量分别为2、6和5单位;选择的分销中心为D1和D4,处理的零配件数量分别为330和294单位;D1到C1的缺货量为2单位,D1到C4的缺货量为87单位,D4到C5的缺货量为122单位。该算例下的生产-分销网络结构如图7所示,其中每条线路上的运输量为所有8种情景下的期望总运输量。工厂在各情景下是否实施监测决策结果如表6所示。对比图6和图7可以看出,在一定风险厌恶水平下,悲观系数的不同将显著影响生产-分销网络结构及所获得的绩效水平。
6 回归试验设计
为考察风险厌恶水平α和悲观系数μ对基于均
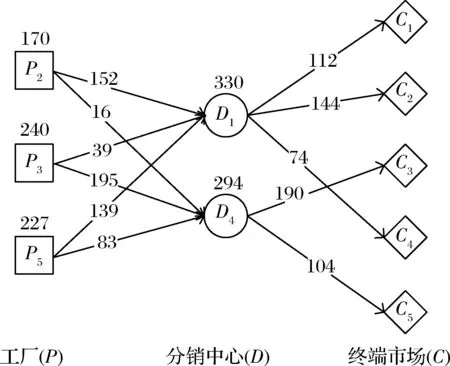

图7 α=0.95和μ=0.7时基于均值-CVaR的网络结构
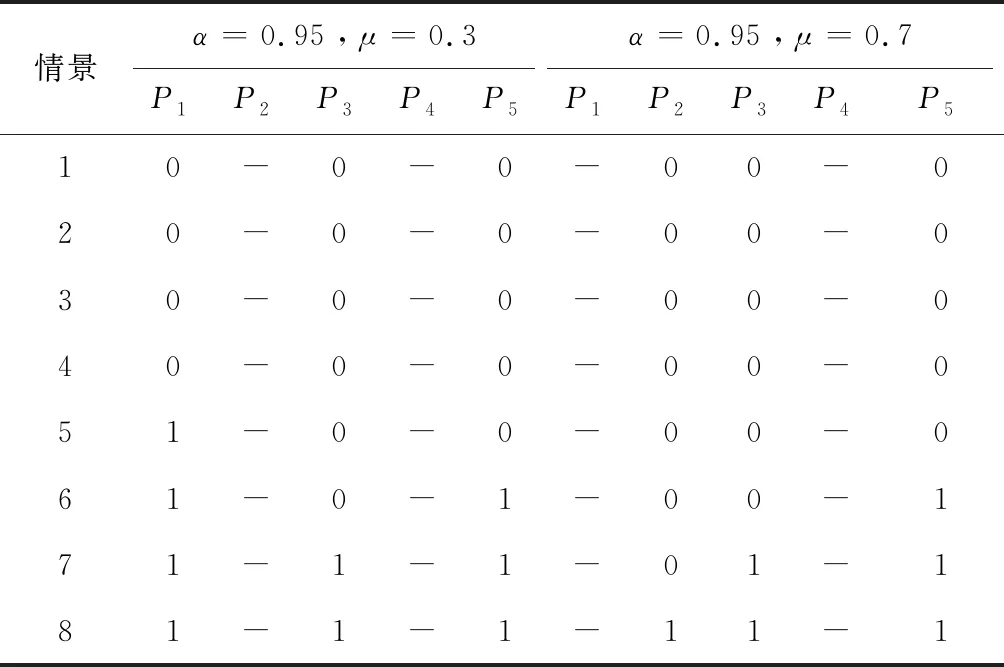
情景α=0.95, μ=0.3α=0.95, μ=0.7P1P2P3P4P5P1P2P3P4P510-0-0-00-020-0-0-00-030-0-0-00-040-0-0-00-051-0-0-00-061-0-1-00-171-1-1-01-181-1-1-11-1
值-CVaR的生产-分销网络绩效的交互影响,采用回归正交试验设计方法,对数值算例结果进行分析。
6.1 一次回归正交试验设计
设试验因素为xj(j=1,2,…,m),试验指标为y,则y与xj之间的一次回归方程为:
(k=1,2,…,m-1且k≠j)
(32)

(33)
分别取μ∈{0.1,0.5,0.9},α∈{0.5,0.725,0.95},并选择正交表L4(23),结果如表7所示。其中,试验5为零试验。根据表7的试验结果,通过计算得一次回归正交试验设计的回归方程为:
y=17072139.8+1150065.76z1+436774.87z2+338445.90z1z2
为检验该回归方程的有效性,采用F检验(即方差分析),结果如表8所示。

表7 一次回归正交设计试验方案及试验结果
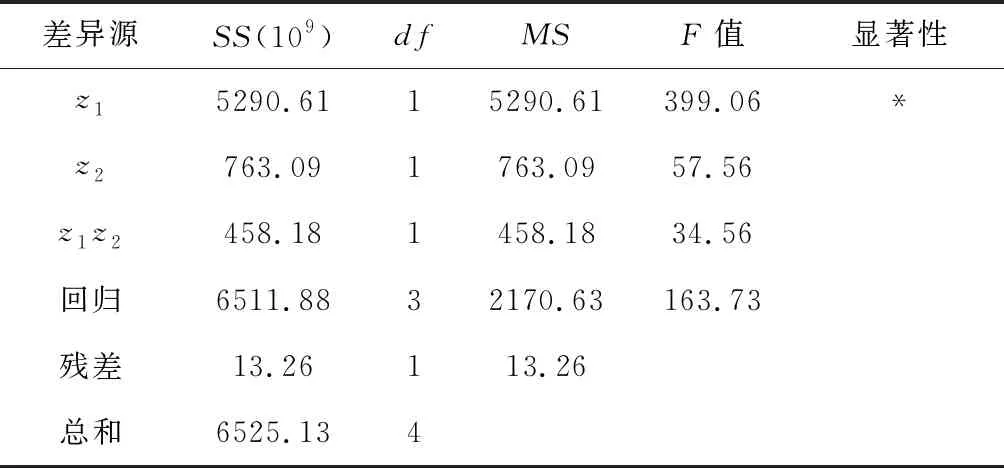
表8 一次回归方差分析表
注:F0.05(1,1)=161.45,F0.01(1,1)=4052,F0.05(3,1)=215.71;*F>F0.05(1,1)或**F>F0.05(3,1),SS,df和MS分别表示差异源平方和、自由度和均方
根据表8的计算结果可知,只有z1(即,μ)显著,说明均值-CVaR绩效与悲观系数μ和风险厌恶水平α之间的关系不宜用一次回归方程来描述。下面将进一步采用二次回归正交试验设计检验参数μ和α对均值-CVaR绩效的影响。
6.2 二次回归正交试验设计
设试验指标y与试验因素xj之间的二次回归
方程为:
k=1,2,…,m-1(j≠k)
(34)

(35)

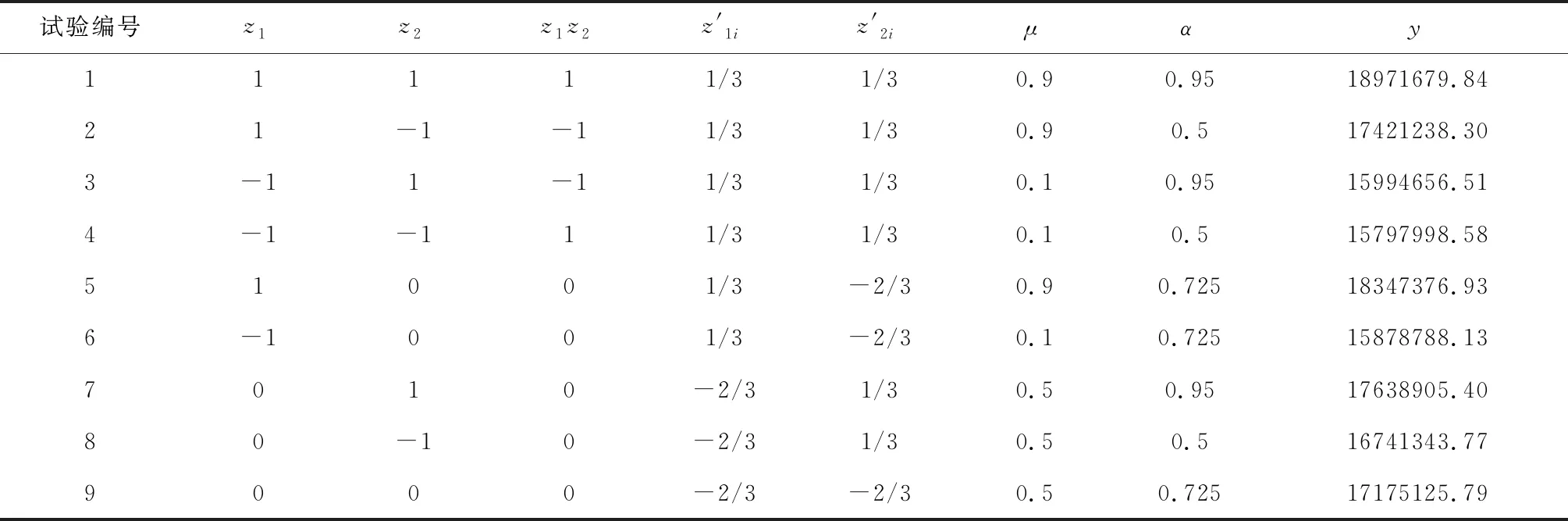
表9 二次回归正交设计试验方案及试验结果
根据表9的试验结果,得二次回归正交试验设计的回归方程为:

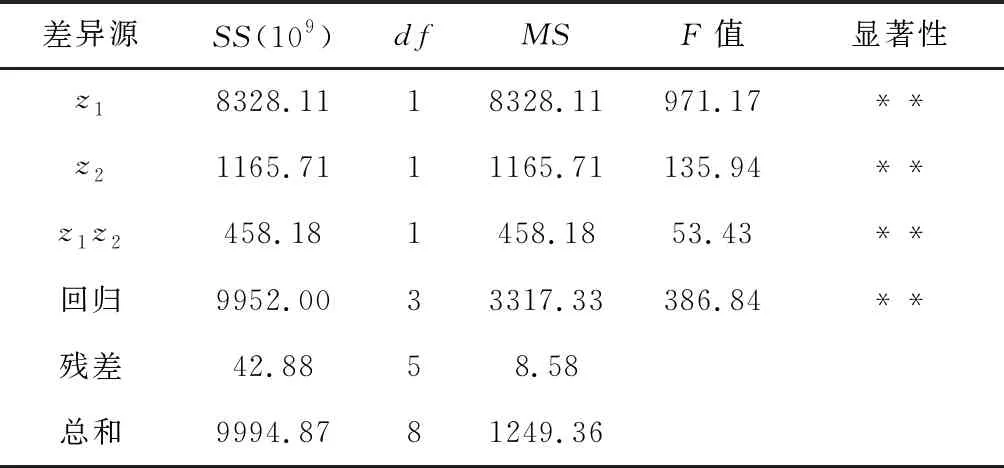
表10 方差分析结果
注:F0.05(1,5)=6.61,F0.01(1,5)=16.26,F0.01(3,5)=12.06;*F>F0.05(1,5)或**F>F0.05(3,5)
由表10可知,在显著性水平0.05下,所求的回归方程非常显著,且z1、z2和z1z2对y均有显著影响。因此,回归方程为:
y=17107457.03+1178141.98z1+440776.85z2+338445.90z1z2
根据偏回归系数的大小,可知各因素对试验指标影响的大小依次为:z1>z2>z1z2,即悲观系数μ对生产-分销网络的均值CVaR绩效影响最大,风险厌恶水平α次之,两者的交互影响最小。进一步,将回归方程中的z1和z2解码为μ和α,得如下预测方程,即
y=15577683.48+218985.17μ+78753.21α+3760510.03μα
根据式(36),可得相应悲观系数μ和风险厌恶水平α下生产-分销网络所能实现的运作绩效情况。
7 结语
本文针对由工厂、分销中心及终端市场构建的生产-分销网络,考虑生产和需求的不确定性,采用情景方法对不确定性进行建模,建立了考虑决策者风险态度的两阶段随机规划模型。对多种不确定性因素的考虑导致情景数量庞大,难以计算,采用情景缩减技术有效降低情景数并保持计算结果的有效性。特别地,对于均值-CVaR模型中所涉及的悲观系数和风险厌恶水平两个参数,采用回归试验设计方法检验了其对均值-CVaR绩效的影响,并给出了绩效预测方程。在实践中,该研究一方面对于企业构建相应的生产-分销网络提供了方法上的借鉴;另一方面,对决策者风险厌恶态度的考虑,可进一步为企业规避风险带来的可能损失提供有效的运作决策支持。特别地,企业实际运作中面临的不确定性通常都是多维的,从而导致针对实际问题所建的模型因规模过大而难以求解。文中采用情景缩减技术对所建模型进行降维,增加了其在实践中的应用性。然而,本文所建立的两阶段随机规划模型要求准确获知未来情景可能发生的概率信息。进一步,可考虑未知分布信息下的生产-分销网络设计问题。此外,还可将问题进一步扩展到多产品、多阶段,并综合考虑客户满意度或经济增加值等其他财务绩效目标,增加模型的适用性。
