四轮毂驱动电动汽车转向运动仿真分析
2019-08-19冉滔邓林东
冉滔 邓林东
重庆交通大学 机电与车辆工程学院 重庆市 400074
1 前言
为使汽车平稳转向,汽车转向时必须通过转向系实现内外侧车轮差速行驶,使在内外侧车轮在转向时转过相同的角度。传统内燃机汽车为了实现转向差速行驶,在驱动桥布置了差速器以实现两侧车轮差速转弯。四轮毂驱动的电动汽车不需要安装差速器,而是通过电控的方式独立的控制汽车的四个车轮,使四个车轮实现不同的车速转向行驶。轮毂电机驱动的电动汽车相对于传统内燃机汽车而言,在结构上大大简化了底盘的布置,没有传动系统、差速系统等,使整车重量大大减小。同时电池的利用效率比传统内燃机的高出很多,也没有传动系统间的机械摩擦损失,电动汽车是汽车未来的前沿发展产品之一。
2 差速转向运动分析
轮毂驱动的电动汽车的转向系统是采用电子控制技术实现汽车转向的,因此对于其转向行驶的研究需要建立如图1所示的汽车转向模型。汽车在转向时有四种转向模式,分别为四轮同时转向、前轴转向、后轴转向以及四轮同方向斜向转向。本文以前轴转向模式建立运动模型和数学模型对其转向特性作一定的分析。
如图所示的转向系统,四轮在实现转向时将作以车外一点为圆心的圆周运动,这一点为汽车的速度瞬心点。在进行分析前先假设汽车整个系统为刚性系统,四个车轮均做纯滚动,不考虑滑动等对结果的影响。图中分别为汽车质心速度、左前轮速度、右前轮速度,各尺寸参数如图所示。
3 建立转向差速数学模型
3.1 数学模型原理分析
四轮毂驱动的电动汽车转向系统是利用四个电机嵌分别嵌入四个车轮中形成独立控制器,从而对每个车轮实现转向控制。汽车中有一个差速转向模型总控制中心,每个车轮的控制器将收集到的车轮的运动参数即此车轮运行的瞬时实际运动参数传送给差速控制中心,控制中心经过计算将理想的车轮车速及转角参数输送回各车轮控制器,最后传递给车轮,改变车轮的行驶,实现汽车的转向运动。
3.2 数学模型的建立
由图1所示的汽车转向运动时的几何关系可得如下的关系式

图1 前轴转向模型

图2 差速转向系统的原理图

式中α1,α3分别为左前轮、右前轮的转动角度,R3,R4分别为左后轮、右后轮的瞬时转动半径。

将(2)式带入(1)式可得

又由速度瞬心运动定理可得

将(2)式中的关系式带入(4)式中得

式(5)即为汽车在转向时的数学模型,从式中可以看出汽车在转向行驶时的各车轮车速不仅与整车的结构参数(L,b,c等)相关,而且与车轮前轴中心的转动角度、车轮中心速度都有关系。汽车的结构参数如表1所示。

表1 汽车模型机构参数
4 模型仿真结果
汽车在转向时可能向一侧单向转弯,也有可能连续的左右转向,为结合实际,本文以蛇形转向行驶为例对汽车转向行为进行仿真分析。汽车转向前先给汽车一个初始的转动角速度,启动汽车后让汽车在内转向,如图3所示,以此运动过程分析汽车在所建立的模型中转向时各车轮的速度关系,并验证模型的可行性。
根据本文建立的数学模型及所设计的行驶工况,利用Matlab进行仿真分析,得到四个轮子在蛇形转向过程中的速度变化情况,如图4所示。可以从仿真结果中得出,汽车在转向行驶过程中,转向半径小的车轮的转动速度低于转向半径大的速度,即内侧车轮的车速低于外侧车轮的车速。这样的结果满足汽车转向稳定性的要求,即证明所建立的转向控制系统的模型的合理性。汽车在转向行驶时通过任意不同的转向半径或转向角度时,利用差速控制系统的计算实现稳定转向。
5 结语
电动汽车的转向系统的研究是实现汽车产出和量产前的必须研究的课题。本文以四轮毂驱动电动汽车的转向系统为研究对象,给出了转向控制系统的运动模型及数学推导模型,并通过软件仿真,得出了汽车在蛇形转向时的运动状况。从仿真结果可以得出汽车在所建立的模型下能实现稳定的差速转向,验证了模型的合理性和可行性。
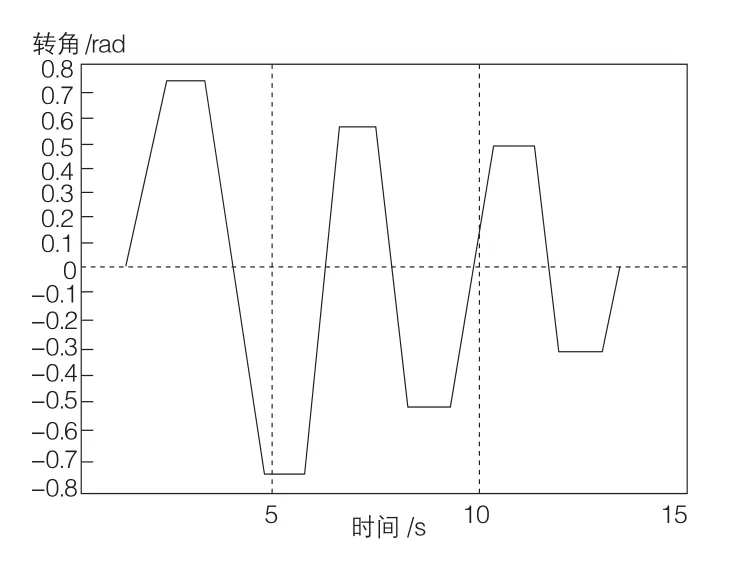
图3 汽车蛇形转向随时间的变化

图4 汽车蛇形转向速度变化图