风场综合利用的新型平流层浮空器轨迹设计
2019-08-13邓小龙丛伟轩杨希祥
邓小龙,丛伟轩,李 魁,杨希祥
(国防科技大学空天科学学院,长沙 410073)
0 引 言
平流层浮空器是指依靠浮升气体产生的浮力在20 km高度附近进行持久驻空飞行的浮空类飞行器,主要包括平流层飞艇和高空气球[1]。此类浮空器主要工作在气流相对平稳、垂直对流小的平流层,具有驻空时间长、载荷量大、效费比高等优点。通过携带任务载荷,平流层浮空器具备长期、实时、全天候、全天时的信息获取能力,可为高分辨率对地观测、预警探测、通信中继、防灾减灾、环境监测和高速通信等应用需求提供技术途径,具有巨大的军事应用和民用前景,引起了越来越多国家的重视[2-3]。
由于工作高度的大气密度极低,平流层浮空器需要庞大的体积来提供浮力,致使其飞行性能严重受制于环境风场。为执行区域驻留任务,平流层浮空器通常利用强大的动力和能源克服风场执行飞行任务,导致其动力分系统和能源分系统庞大且复杂,重量代价高,这也是目前平流层飞艇设计所面临的一个重要问题。
在平流层高度,大气运动以东西方向的水平运动为主,垂直对流较弱。研究发现,平流层风场存在东西风向翻转,在东风带和西风带之间存在空间范围较大、时间上比较稳定的纬向风转换层,即准零风层[4]。针对准零风层现象,平流层浮空器通过改变浮重平衡状态进行驻空高度的调控,理论上能以较小的能源和动力代价实现飞行器的区域驻留,为解决临近空间浮空器区域驻留问题提供了一种解决途径。近年来,这种基于风场环境利用的新型平流层浮空器得到了广泛关注。这种新型平流层浮空器结合了平流层飞艇和高空气球的优点,一方面,它采用了与高空气球相似的技术路线,继承结构简易、操作方便、成本低、安全可靠等特点;另一方面,对高空气球的控制系统进行了技术革新,可以充分利用平流层环境特征,克服高空气球在航迹控制和高度控制上的局限性,实现对飞行轨迹设计和控制,进而完成对指定区域的长时驻留。
谷歌“Project Loon”项目中,谷歌气球通过调节副气囊内空气量对2 km范围内不同高度风层的利用进行飞行轨迹设计,通过对气球组网的控制进行区域连续覆盖,旨在为偏远地区提供网络服务[5]。2016年实现了在秘鲁区域上空停留90天,并于2017年10月为遭遇飓风袭击的波多黎各提供应急通信服务。诺斯罗谱·格鲁曼(Northrop Grumman)公司的“STRATACUS”项目,基于零压球体制的诺格气球通过控制氦气温度对不同高度层风场的利用进行飞行轨迹设计,旨在通过跨多网协作的平流层气球群为战区提供C4ISR服务[6]。
近年来,国内学者研究了通过对热能利用进行空气排放控制等技术手段进行高度调控、通过悬挂于气球下方的气动帆面进行航向控制的多种方法,理论上研究了平流层浮空器的轨迹控制能力[7-8]。王益平等[9]通过动力学与热力学建模初步分析了平流层浮空器在准零风层特殊风场的区域驻留控制策略,但建模过程进行了大量简化,风场因素考虑很少。
本文以新型平流层浮空器为研究对象,建立以南瓜形超压球(内含副气囊)为主体的具有能源、推进、管理、回收分系统的系统模型并基于受力分析建立浮空器的动力学模型;设计了三种区域驻留策略,建立区域驻留模型,并在实际风场中针对五种不同的控制方式进行飞行仿真,得到飞行轨迹后对比分析得出结论,进而指导实际应用。
1 平流层浮空器方案
如图1所示,平流层浮空器主要由球体和吊舱组成。其中,球体采用南瓜形超压球体制,填充氦气。吊舱内包括能源、推进、艇务管理、回收和有效载荷等分系统。能源分系统提供系统运行所需的能源;推进分系统采用电机-螺旋桨技术方案,用于提供系统轨迹控制能力;艇务管理分系统用于确保系统的正常运行,实现与地面的数据传输等;回收分系统用于回收有效载荷。依据浮空器系统的设计准则,以总质量最小为目标函数,基于推阻平衡、能量平衡以及浮重平衡设计建立模型,得到了如表1所示的主要设计参数。
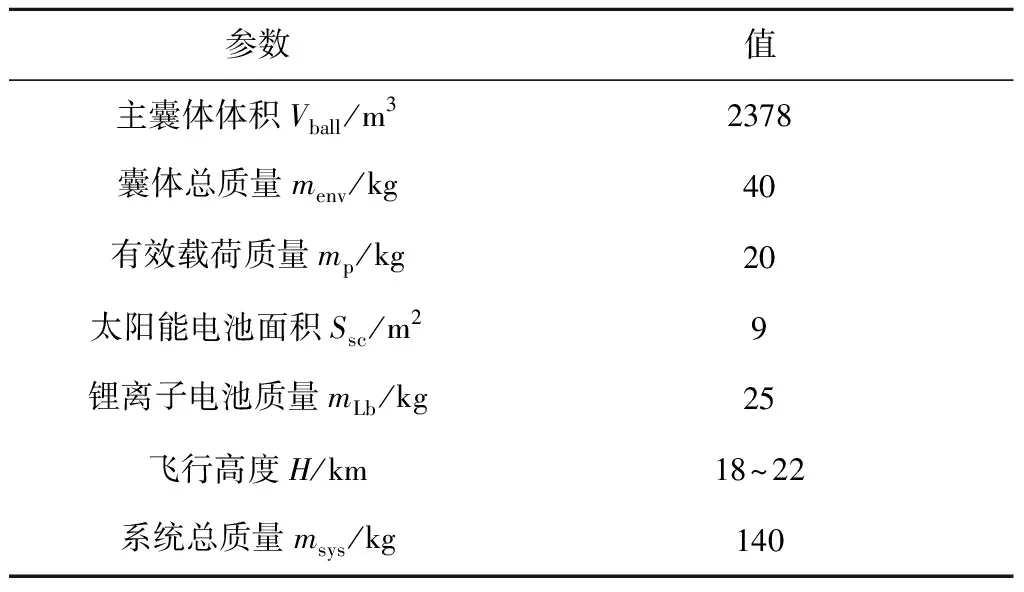
参数值主囊体体积Vball/m32378囊体总质量menv/kg40有效载荷质量mp/kg20太阳能电池面积Ssc/m29锂离子电池质量mLb/kg25飞行高度H/km18~22系统总质量msys/kg140
2 数学建模
2.1 动力学模型
平流层浮空器在飞行过程中,受到的主要作用力为浮力、重力、附加惯性力以及螺旋桨控制力,其受姿态影响比较小,故可以忽略系统的姿态变化,将整个系统视为质点,建立质点动力学方程。
如图2所示,建立惯性坐标系xoy,定义东北天方向为地面惯性系的x,y,z正向,即向东为x正向,向北为y正向,向上为z正向。图2中vw为当地风向,θ为风向角;Fp为推进系统产生的推力,β为其与x轴正向的夹角。
在z轴方向上,系统受静浮力的作用上升,在xoy平面上东西方向在风场作用下飘飞,南北方向还受到动力作用:
(1)
式中:mtotal为浮空器总质量,包含氦气质量与变化的副气囊中空气的质量;B为浮力;g为当地重力加速度,Fdx,Fdy,Fdz为3个方向的气动力;Faddx,Faddy,Faddz为3个方向的附加惯性力;Fcy为南北方向螺旋桨控制力。
浮力大小与空气密度、超压气球体积、重力加速度有关:
B=ρairVg
(2)
式中:ρair为空气密度,随高度变化而变化,V为超压气球体积,由球体模型获得。
为对浮空器进行轨迹控制,平流层浮空器通过动力系统克服阻力,
Fcy=Ppsηps/vr
(3)
式中:ηps为螺旋桨-电机推进系统的综合效率,Pps为推进系统功率,vr为浮空器空速,考虑到系统总重及平流层风场特征因素,设计最大抗风能力为4 m/s。
阻力大小与空气密度、系统相对空气的速度、阻力系数、相对参考面积有关,20 km处垂向风较小,可以忽略,则有:
(4)
式中:vrx,vry,vrz分别为水平方向x,y方向空速。
系统的囊体部分为球体,其附加惯性力为:
(5)
系统的运动学方程为:
(6)
2.2 高度调控模型
基于风场综合利用的新型平流层浮空器高度调控的目的是对准零风层上下方向相反的风层进行有效利用以达到区域驻留的目的。
当浮空器需要提升飞行高度时,排气阀开启将副气囊中空气排出,空气质量的变化[10]为:
(7)
式中:ΔP为超压气球与大气环境压差,Rair为阀门半径,K为阀系数。
当浮空器需要降低飞行高度时,鼓风机做功,将外界环境空气压入副气囊,空气质量的变化[11]为:
(8)
式中:Vin为单位时间进气量。
浮空器高度调控包括增加高度和降低高度。通过打开副气囊阀门排放空气进行增加高度,暂不考虑功耗影响。利用鼓风机克服压差做功,将外界空气压入副气囊降低功耗,所需功率Pac由下式进行计算[12]
(9)
式中:qm为质量流量;v1,v2分别为鼓风机入口和出口空气的速度。
浮空器系统总功率需求为:
Ptotal=Pac+Pps+Ppl+Pcon
(10)
式中:Pac为高度调控功率,Pps为推进分系统功率,Ppl为载荷功率,Pcon为控制、测控、环控等航电系统功率。
3 区域驻留飞行控制策略
3.1 基于高度调控的东西方向独立控制策略
平流层浮空器的东西方向飞行控制是通过高度调控利用准零风层附近纬向风切变来实现的。准零风层的高度大概在20 km,本文设置控制策略在18 km之上开始作用。设h0为准零风层的高度(随时间地点变化),则在地惯系中有:
(11)
图3为基于高度调控的控制策略示意图。浮空器在东西方向的驻留区域设置为±50 km,当系统上升到18 km的高度之后,副气囊不再排气,仅考虑东西方向的分运动,由于此时纬向风为西风,故系统在西风的作用下向东飞行,当其位移大于50 km时,反向向西运动,但此时的纬向风仍为西风,则需要高度调控机制的作用使系统上升进入东风带,这样系统便开始向西运动;当其位移小于-50 km时,需要反向向东运动,但此时的纬向风仍为东风,则需要在高度调控机制的作用下下降进入西风带,这样系统便开始向东运动。从控制机构的角度来看,高度上升即为副气囊通过排气阀排气,记为Cout=1,高度下降即为副气囊通过鼓风机吸气,记为Cin=1,则基于高度调控的东西方向区域驻留策略可以表达为:
(12)
式中:x为东西方向位移,vxwind为东西方向风速。
3.2 基于动力系统的南北方向独立控制策略
平流层浮空器的南北方向飞行控制是通过推进系统提供推力实现的。设置南北方向的驻留范围为±20 km。图4为基于动力系统的控制策略示意图。当系统运动到南北向的驻留边界时,螺旋桨开始工作并为其提供足够大的反向的推力使系统的南北向加速度分量反向,这样系统减速至零后开始回飞,当系统运动到南北方向总位移为0的位置时螺旋桨停止工作,系统继续在风场作用下自由飞行直到下一次抵达边界,这样就实现了南北方向上的区域驻留,假设系统的动力系统受开关控制,当动力系统开始工作时,记为Cprop=1,动力系统结束工作时,记为Cprop=0,则基于动力系统的南北方向区域驻留策略可以表达为:
(13)
式中:y为南北方向位移,vywind为南北方向风速。
3.3 基于风场综合利用的协同控制策略
第3.1节和第3.2节讨论的区域驻留策略是将风场矢量分解为东西以及南北两个方向,并分别针对两个方向的风场利用不同的控制方式独立进行控制以达到区域驻留的目的。分方向独立控制的优势在于思路清晰、易于实现,但对于风场的利用不够高效完全,仅东西方向利用风场纬向风切变的特点实现驻留,南北方向则完全依靠动力系统,这样对系统的能源就提出了更高的要求,太阳能电池面积、锂离子电池质量都要足够大,且频繁地开关动力系统也会对推进系统的控制和可靠性均提出很高要求。因此,为了减轻动力系统的工作负担,降低能耗,更充分地利用风场能量,本节提出一种基于风场综合利用的协同控制区域驻留策略,分析东西方向和南北方向风场综合利用的能力。
基于风场综合利用的协同控制策略加入同样的位置约束。为了便于策略的解释,假设东西方向风场与第3.1节中的相同,南北方向风场假设风向切变的高度为h1,其下为北风带,方向为负;其上为南风带,方向为正,即:
(14)
图5为基于风场综合利用的协同控制过程示意图。系统上升到18 km高度后,开始随风无控定高飞行,方向为东南方向,当系统飞到边界时(东侧边界或南侧边界),高度调控系统控制副气囊排气,气球上升,如果率先到达的是东侧边界则需上升到h0高度之上,进入东风带;如果先行抵达的是南侧边界则需上升到h1高度之上,进入南风带,进而系统远离边界飞行,以此类推,每当系统抵达边界时,随即调节副气囊吸排气进行高度调控,进入反向风速带,这样仅通过综合利用风场特性即可实现两个方向的区域驻留。当系统的飞行轨迹在调控机制作用下逐渐收敛至边界相交处时,仅通过高度调控已无法满足要求,这时就要通过动力系统发挥作用,将系统推回驻留中心。
4 区域驻留仿真与分析
运用MATLAB中的SIMULINK模块搭建了不同控制策略下区域驻留模型,运用实际风场针对以下五种控制方式进行仿真及对比分析:1)无控自由飞行仿真;2)东西方向单通道控制飞行仿真;3)南北方向单通道控制飞行仿真;4)双通道独立控制飞行仿真;5)双通道协同控制飞行仿真。
4.1 高空风场
本文的主要目的是设计出一种基于风场综合利用的平流层浮空器区域驻留策略,其区域驻留能力与风场环境密切相关。本文选取了我国某地三天的真实风场。图6为风场剖面图,图6(a)为东西方向风速分量,由图6(a)可知,20 km高度附近的风速带内风速趋近为0,此风速带即为准零风层,准零风层上下,存在东西方向切变的纬向风,这是综合利用风场通过高度调控以达到区域驻留目的的理想风场环境;图6(b)为南北方向风场,从图6(b)可以看出,南北方向风速随高度变化并无明显规律,此种情况下的风场高度调控实现区域驻留,根据风速统计得出的规律可知,在准零风层高度附近南北方向风速较小。
4.2 无控自由飞行仿真
1)控制策略
平流层浮空器分别在19 km,20 km,21 km高度达到浮重平衡,不加控制的在风场的作用下自由飞行。
2)结果分析
随着高度变化,外界环境参数也会变化,平流层浮空器在平衡状态下的参数也随之变化。图7为平流层浮空器在不同高度飞行72 h得到的结果。由图7可知,由于驻空高度不同,浮空器呈现出完全不同的飞行轨迹,且在20 km,21 km驻空高度上总位移均超过了2000 km。由此可见,在无控自由飞行模式下,较长的漂浮距离会严重影响系统对区域信息获取和保障能力。因此,飞行控制策略是实现其区域驻留的重要条件。
4.3 东西方向单通道控制飞行仿真
1)控制策略
以某地为驻留区域中心,东西方向基于高度调控达到±50 km范围的区域驻留,南北方向不加控制。
2)结果分析
图8为东西方向单通道控制的仿真结果。其中,图8(a)为竖直方向运动状态示意图,图8(b)为飞行三维轨迹图,图8(c)为飞行轨迹水平面投影。系统通过7次吸排气进行高度调控即可实现72 h、东西方向±50 km范围的区域驻留;由于三天的风场不同,而控制的方法又是达到风速反向的高度即停止调控,所以每次达到的高度也不尽相同。在此期间,高度调控系统的鼓风机共启用4次,对应的能耗约122 Wh。由于南北方向未加控制,导致南北方向的偏移接近300 km,远离了驻留中心,比较严重地影响了系统的实用性能。
东西方向单通道控制下的飞行仿真结果表明,基于高度调控可以实现东西方向50 km范围的区域驻留,但南北方向无控会极大影响系统的使用效能。
4.4 南北方向单通道控制飞行仿真
1)控制策略
以某地为驻留区域中心,南北方向基于动力系统达到±20 km范围的区域驻留,东西方向不加控制。
2)结果分析
图9为南北方向单通道控制的仿真结果。其中,图9(a)为三维飞行轨迹图,图9(b)为水平方向上的投影图。由于系统在飞行过程中不具备东西方向的控制,故在其飞到指定高度后,开始定高飞行,系统通过16次动力系统调控即可实现72 h、南北方向±20 km范围的的区域驻留。在此期间,推进系统对应的能耗约10800 Wh。因此,采用推进系统进行驻留控制所需能源远大于高度调控系统所需能耗,这也是风场利用策略相对于风场对抗策略的优势。东西方向由于未加控制,系统在东风的持续作用下,72 h向西偏移了超过2000 km。
南北方向单通道控制下的飞行仿真结果表明,基于动力系统进行调控可以实现南北方向±20 km范围的区域驻留,但东西方向无控会极大影响系统的使用效能。
4.5 双通道独立控制飞行仿真
1)控制策略
以某地为驻留区域中心,东西方向基于高度调控实现±50 km范围内的区域驻留;南北方向基于动力系统实现±20 km范围内的区域驻留,通过双通道控制即可实现矩形区域覆盖范围。
2)结果分析
图10为双通道独立控制的仿真结果。其中,图10(a)为飞行三维轨迹图,图10(b)为飞行轨迹的水平面投影。平流层浮空器在双通道控制下的飞行通过7次高度调控、16次动力系统调控基本实现了72 h、100 km×40 km范围的区域驻留,两个方向的结果与前面单通道控制得到的结果大体相同,由于没有主动对风场进行利用,独立控制策略的能源需求基本是两个单通道能源消耗之和。也就是说,双通道独立控制策略主要目的区域驻留,其能耗方面有必要进行优化。
4.6 双通道协同控制飞行仿真
1)控制策略
以某地为驻留区域中心,在系统高度调控范围内,东西方向与南北方向均存在风向切变的风场中,采用基于风场综合利用的双通道协同控制策略以实现区域驻留,更加高效地利用风场能量,必要时启动动力系统的方式,实现区域覆盖范围。
2)结果分析
仿真发现,平流层浮空器动力系统的工作模式及系统对风场的利用程度与东西和南北两个方向的风场切变高度接近程度有关。为了将结果清晰地展现出来,选取了两天的风场进行对比,选取的两天风场东西方向风场分量特点相似,南北方向风场分量风向切变高度不同,2016年12月23日零时的风场切变高度为18.18 km,与东西向的切变高度相对接近,如图11(a)所示;2016年1月12日零时的风场切变高度为21.78 km,与东西向的切变高度相对远离,如图11(b)所示。
针对两种典型风场条件,分别开展基于风场综合利用的双通道协同控制策略下的飞行仿真,结果如下:
1)切变高度相近风场下的飞行仿真结果
由图12可知,在切变高度相近风场条件下,平流层浮空器经过18次高度调控,4次动力系统调控基本实现了72 h、东西方向±50 km、南北方向±20 km范围的区域驻留,与之前的双通道独立控制策略相比,这种基于风场综合利用的协同控制策略充分利用了不同高度层的风场,大幅减少了动力系统工作时间,总能耗约2500 Wh,约为独立控制策略的四分之一。
2)切变高度远离风场下的飞行仿真结果
由图13可知,在切变高度相对远离风场条件下进行的飞行仿真,平流层系统经过28次高度调控,14次动力系统调控基本实现了72 h、东西方向±50 km、南北方向±20 km范围的区域驻留,通过与前面切变高度相近风场条件下进行的飞行仿真对比可以发现,在此种风场情况下,即使通过大量的高度调控对不同风层风场利用,系统仍然会快速飞向到边界交点,随即需要启动动力系统,并未显著降低对动力系统的需求,且大幅增加了高度调控系统的工作,导致系统总能耗与独立控制策略的情况相当,因此在这种情况下需要进一步考虑具体的优化策略。
5 结 论
基于风场环境利用的平流层浮空器结合了平流层飞艇和高空气球的优点,它继承了其结构简易、技术成熟度高、安全可靠等特点,同时避免高空气球在航迹控制上的局限性,具备指定区域的长时驻留的能力。本文基于动力学模型和风场特点,分析了平流层浮空器区域驻留策略,重点讨论了基于高度调控的东西方向独立控制策略、基于动力系统的南北方向独立控制策略以及基于风场综合利用的协同控制策略,对无控自由飞行、东西方向单通道独立控制、南北方向单通道独立控制、双通道独立控制以及双通道协同控制五种不同控制方式下工作模式分别进行了仿真分析。结果显示,双通道控制下的工作模式可以为平流层浮空器提供区域驻留的途径,同时在一定风场条件下,双通道协同控制策略可大幅降低平流层浮空器对推进系统的依赖,进而降低系统的能耗。
