“机电一体化”课程移动机器人协作实验平台搭建与探索
2019-08-12李海芸叶大鹏邱荣斌陈志伟
李海芸 叶大鹏 邱荣斌 陈志伟

摘 要: 为改善现有实验平台实验项目综合性不强等问题,满足理论与实际应用相结合的实验教学及科研的要求,研制移动机器人协作实验平台。以牧草捡拾堆垛协作机器人为载体,采用机电一体化设计理念和模块化设计思想,以STM32为控制系统核心,结合光电传感技术和多传感器融合技术确保机器人行进路径及检测结果的精准性。学生可以灵活重组不同功能模块,完善软件编程,完成多个捡拾堆垛目标、多种路径控制综合实验。此外,在改善牧草业领域人工捡拾堆垛牧草劳动强度大的现状,提高牧草捡拾的生产效率及经济效益方面具有一定的实际应用价值。
关键词: 模块化设计; 机电一体化; 机器人; 路径规划; 实验平台; 机器视觉识别
中图分类号: TN99?34; TP24 文献标识码: A 文章编号: 1004?373X(2019)15?0150?04
Construction and exploration of mobile robot cooperative experimental
platform in "Mechatronics" course
LI Haiyun1,2, YE Dapeng1,2, QIU Rongbin1,2, CHEN Zhiwei1,2
(1. College of Mechanical and Electronic Engineering, Fujian Agriculture and Forestry University, Fuzhou 350002, China;
2. Fujian University Engineering Research Center for Modern Agricultural Equipment, Fuzhou 350002, China)
Abstract: In order to improve project comprehensiveness of experimental platform, and satisfy requirements combining the theory with practical application for teaching and scientific research, a kind of mobile robot cooperative experiment platform was developed. Based on the hay bales pickup and palletizing robot as the carrier, the mechatronics design concept and modular design idea are adopted. The STM32 is taken the core of the control system of the platform. The photoelectric sensor technology and multi?sensor fusion technology are used to ensure the accuracy of the robot's travel path and detection results. The students can flexibly reconfigure different functional modules, improve software programming, and accomplish multiple hay bales pickup, palletizing target and multiple path control comprehensive experiments. In addition, it has a certain practical application ability in the aspects of reducing the current labor intensity of stacking pastures in the forage grass industry, and improving the production efficiency and economic benefits of pasture picking.
Keywords: modularization design; mechatronics; robot; path planning; experiment platform; machine visual identity
0 引 言
机电一体化系统设计是我校机电工程学院国家级特色专业:机械设计制造及其自动化专业机械电子工程方向的一门专业核心课,为后续综合性设计、毕业设计与实践等环节奠定了重要理论基础,为该专业学生提供机电系统检测、驱动、控制等知识。课堂教学模式往往以教师讲授为主,讲授式教学在课堂教学中所占的比例太大,教学方法不能适应相应课程的教学要求,教学效果自然不尽人意,学生学习动机弱且参与度低。本文以草捆捡拾码垛机器人为教学载体,通过结构设计,掌握机电一体化系统典型机械零部件和执行元件的选型和结构设计方法;通过测试及控制系统方案设计,掌握控制系统的硬件组成、工作原理和软件编程思想,促进学生在科学态度、创新精神、专业技能等方面综合素质的提高[1?3]。
1 实验台系统工作原理
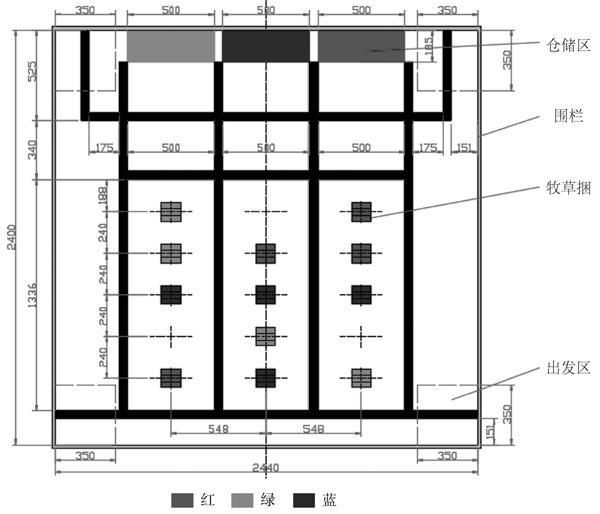
机器人实验平台运行的场地尺寸如图1所示,规格为2.4 m×2.4 m。底面颜色为白色,内设有黑线作为机器人行走的参考路径;黄边框代表围栏;上方水平设置的红、绿和蓝方框代表各牧草捆所属的仓储区;下方分散设置的红、绿和蓝方框代表不同种类的牧草捆,各用4个180 g喷涂颜色的卫生纸模拟,随机放置在每列待捡拾区域的十字交叉处,其中,每列每个颜色至少放置1个牧草捆;场地的四周分别设有35 cm×35 cm的出发区,机器人必须从出发区进入赛道,每次夹取四个草垛,按批次逐色完成任务。
图1 机器人运行场地尺寸图
通過机器视觉技术实现草垛颜色判别,采用光电传感技术定位草垛初始位置,确保行进路径的精准性,多传感器融合技术确保检测结果精准。两组对称分布的三自由度机械臂上分别安装回转装置,通过草垛重力实现自适应摆正和码放,运用无线通信技术实现两台轮式机器人位置和动作实时通信。
2 机械本体设计
机器人整体结构如图2所示,采用轮式机器人结构[4],主要由底盘结构模块、转盘结构模块和抓取结构模块组成。
底盘结构采用菱形布局,左右方向布置静音轮,前后方向布置静音万向轮。转盘结构实现对手爪固定旋转盘的旋转运动。抓取结构采用夹持式机械手,弧形的手爪有利于对草捆的夹持,手爪上的齿形能增大摩擦,保证夹持草捆稳定性。
图2 机器人整体结构示意图
3 控制系统硬件结构设计
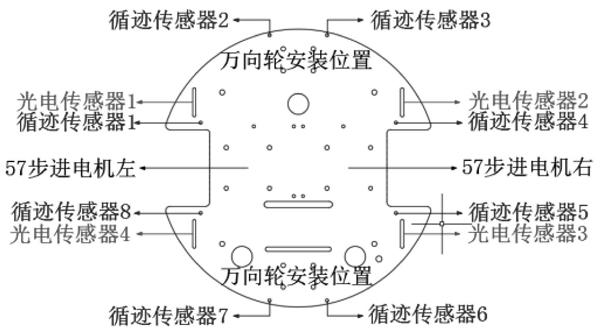
本硬件系统由主控模块、驱动模块、电源模块和传感器模块组成,在底盘上的布置如图3所示。控制芯片采用STM32F103RCT6,适用于机器人实验平台的多功能需求控制,具有一定的稳定性[5?7]。传感器模块采用光电传感器和循迹传感器实现行走定位与草捆位置定位,采用OpenMV3摄像头识别草捆种类[8?9]。
图3 底盘硬件布置图
STM32开发板与24路舵机控制板联合控制9个数字舵机,简化了主控模块的控制难度[10]。各子传感器与主控模块相连,将检测到的数据传输至主控模块进行分析,并进行智能化的控制操作。
4 控制系统软件设计
4.1 机器视觉识别设计
机器视觉识别程序采用串口输出的方式,将识别检测到的草捆种类经由串口输出至主控模块,便于主控模块对草捆的种类识别并设置相应的抓取作业。
4.2 机器人运动路径规划
4.2.1 蚁群算法[11]
蚁群算法的基本思想来源于自然界蚂蚁觅食的最短路径原理,为了便于蚁群算法搜索到草捆捡拾码垛的最优路径,本文采用栅格法对比赛场地进行栅格划分,如图4所示,对场地网格划分图进行简化并建立二维坐标系,图中的白色块表示可行走的路线,黑色块表示障碍物,红、绿、蓝三种颜色的色块表示障碍物,为了更好的表示草捆及仓储区的位置所在,因此对其障碍物色块进行颜色标定。
图4 环境栅格图
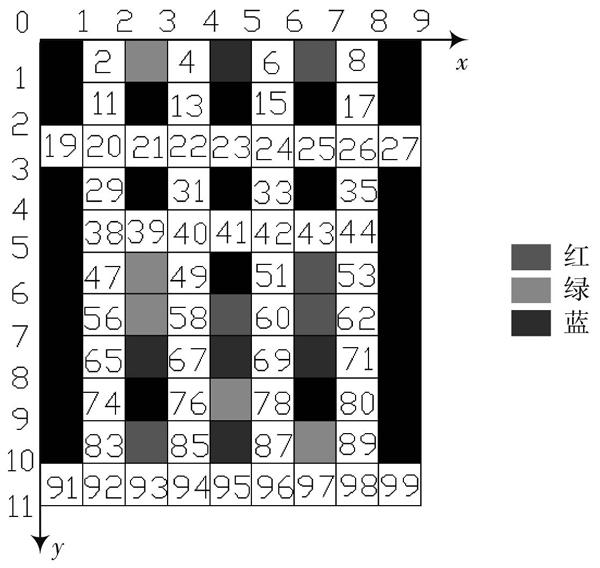
在初始时刻各条路径上的信息量相等,在搜索过程中,蚂蚁的状态转移概率是根据每条路径上积累的信息量和路径的启发信息来计算的。[pkijt]表示在[t]时刻蚂蚁[k]由节点[i]到[j]的状态转移概率:
4.2.2 路径规划
依据实际需求及机器人可以实现一次抓取四个草捆的结构特征,将机器人在场地中的路径规划分为如下两步:
1) A机器人实现对红、蓝两种草捆的捡拾与码垛,B机器人实现对红、绿草捆的捡拾与红色草捆的码垛。路径如图5a)所示,A机器人由右下角出发区出发,行走至红、蓝两色仓储区的中间,抓取红、蓝草捆。将会遇到左右两侧都有草捆、左侧有草捆右侧无草捆和左侧无草捆右侧有草捆三种情况,当检测到红、蓝草捆时均需完成捡拾,直到各自颜色所属机械爪已抓取满。B机器人需要对红、绿两种草捆各两个进行抓取。
图5 路径规划
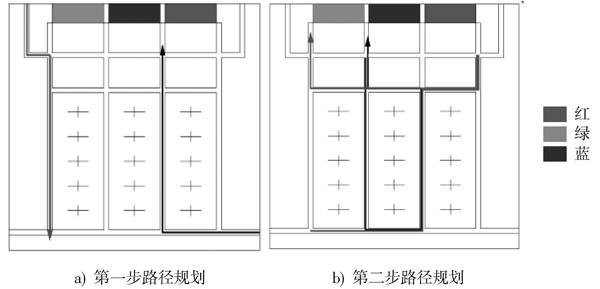
2) A机器人实现对蓝、绿两种草捆的捡拾与码垛,B机器人实现对红、绿两种草捆的捡拾与绿色草捆的码垛。如图5b)所示,A机器人摆放完两个红草捆和两个蓝草捆后,行走至蓝、绿仓储区的中间位置,并返回至红、蓝仓储区的中间道抓取余下的两个红、蓝草捆。机器人将可能遇到左右两侧都有草捆、左侧有草捆右侧无草捆和左侧无草捆右侧有草捆三种情况,当检测到蓝、绿色草捆时都需要完成捡拾任务,直到各自颜色所属机械爪已抓取满。
5 实验平台用于实践
5.1 实验平台调试
草捆捡拾码垛机整机模型如图6所示,学生分组对机器人进行调试,主要针对机械结构的零件制作和连接配合,以及控制系统的硬件布局。
图6 草捆捡拾码垛机整机
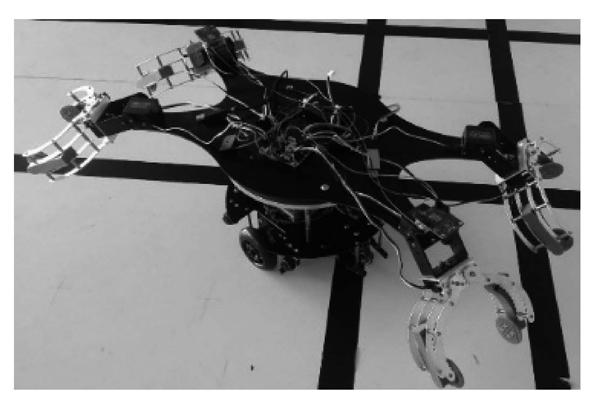
在草捆的抓取过程中,需要机械手垂直向下,抓取草捆。而由于草捆的材质为纸质,原始的机械手夹持力不足、易松动,采取在机械手上加装辅助夹持块的设计,辅助夹持块上设有多个凸起,帮助机械手能够更稳定地抓取草捆。
摄像头原先布置在手爪的左右侧,侧向对草捆种类进行识别,而实际出现识别错误的现象。改进后将摄像头布置在机械手安装部位舵机的上方,向下对草捆进行颜色识别。当检测草捆种类时,机械手处于水平位置,待摄像头检测完草捆种类后再将机械手放下,以避免机械手阻碍摄像头的拍摄。
5.2 实验教学效果
操作评分由“捡拾分”和“码垛分”两部分组成。其中“捡拾分”以草捆完全离地为准,单个草捆累积计分1次,分值为3分。“码垛分”包括全部进入和部分(进入面积≥50%)进入,分值分别为5分、3分。对调试后的机器人进行相关实验,实验效果如表1所示。
表1 实验结果统计表
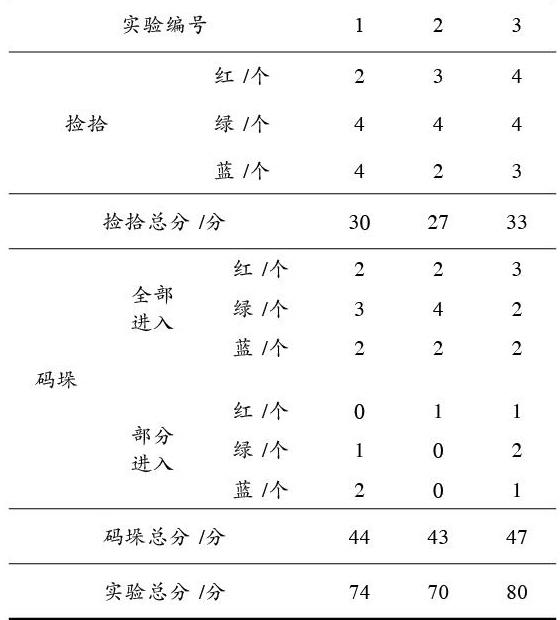
通过实验可以发现,机器人完成全部草捆的捡拾和码垛任务具有一定的可行性,该实验台设计合理,完全满足实验教学和科研实验要求。实验教学过程中,实验对象、实验内容、实验平台和实验方法的合理分割和逻辑搭配,构建以学生为主体的学习氛围。通过在该平台的知识和实践学习,参加各类创新型竞赛、中国农业机器人竞赛和工程训练综合能力竞赛等的学生人数明显增加。
6 结 语
本实验平台以典型的机电一体化产品——机器人为载体,结合草捆捡拾堆垛的应用,设计一种基于STM32的草捆捡拾码垛机器人。在实验平台搭建过程中,对“机电一体化”课程的知识进行离散并与机器人各模块对应。基于模块化设计理论自主研制机器人综合实验平台,弥补现有教学实验设备、实验功能和对象单一,扩展性能不够丰富等缺点。实验教学中,使理论学习与技能训练紧密联系,有效激发了实验对象的实践积极性和主动性,逐步提高其综合实践能力和工程创新意识。
参考文献
[1] 高正中,龚群英,宋森森.基于STM32的智能平衡车控制系统设计[J].现代电子技术,2016,39(15):46?48.
GAO Zhengzhong, GONG Qunying, SONG Sensen. Design of STM32?based control system for intelligent balanced vehicle [J]. Modern electronics technique, 2016, 39(15): 46?48.
[2] 李海芸,董楸煌,邱荣斌,等.高校金工实习教学存在的问题及对策研究[J].实验室科学,2016,19(5):151?153.
LI Haiyun, DONG Qiuhuang, QIU Rongbin, et al. Study of problems and countermeasures in the metalworking practice teaching of universities [J]. Laboratory science, 2016, 19(5): 151?153.
[3] 胡洪钧,谢立敏,梁晓,等.工业机器人实验项目的开发与实践[J].实验技术与管理,2015,32(9):201?203.
HU Hongjun, XIE Limin, LIANG Xiao, et al. Development and practice of experimental project on industrial robot [J]. Experimental technology and management, 2015, 32(9): 201?203.
[4] 李荣康.一种新型码垛机器人的机构设计及动态性能研究[D].南宁:广西大学,2017.
LI Rongkang. Mechanism design and dynamic performance analysis of a new type of palletizing robot [D]. Nanning: Guangxi University, 2017.
[5] 趙彩霞.基于STM32移动机器人目标动态追踪的研究[D].呼和浩特:内蒙古大学,2017.
ZHAO Caixia. Research of dynamic target tracking based on STM32 mobile robot [D]. Hohhot: Inner Mongolia University, 2017.
[6] 贾卫东.基于STM32单片机的码垛机械手控制系统的研究与设计[D].鞍山:辽宁科技大学,2015.
JIA Weidong. Palletizing robot control system based on STM32 microcontroller in the research and design [D]. Anshan: University of Science and Technology Liaoning, 2015.
[7] 范鲁一.基于STM32码垛机器人的建模与控制器的设计[D].青岛:青岛大学,2015.
FAN Luyi. Design of modeling and controller of stacking robot based on STM32 [D]. Qingdao: Qingdao University, 2015.
[8] 梅妍玭,傅荣.基于OpenMV的3D定位识别系统[J].新技术新工艺,2018(2):50?52.
MEI Yanpin, FU Rong. Research on the 3D identification system based on OpenMV [J]. New technology & new process, 2018(2): 50?52.
[9] 梅妍玭,傅荣.基于OpenMV的小车定位系统研究[J].扬州职业大学学报,2017,21(4):46?48.
MEI Yanpin, FU Rong. Research on the vehicle positioning system based on OpenMV [J]. Journal of Yangzhou Polytechnic College, 2017, 21(4): 46?48.
[10] 何明超.基于STM32F4的码垛机器人运动控制器研究[D].上海:上海交通大学,2015.
HE Mingchao. Research on palletizing robot motion controller based on STM32F4 [D]. Shanghai: Shanghai Jiaotong University, 2015.
[11] 张家善.基于改进蚁群算法的物流配送车辆路径优化研究[D].阜新:辽宁工程技术大学,2014.
ZHANG Jiashan. Research on vehicle outing problem of logistics distribution based on improved ant colony algorithm [D]. Fuxin: Liaoning Technology University, 2014.