电动方程式赛车双电机动力系统设计与仿真
2019-08-12仝志辉吴全君游远翔
仝志辉 吴全君 游远翔
摘 要: 比较现有电动方程式赛车电机布置方式,综合考虑赛车的动力系统布置形式,确定双电机设计方案。首先,确立赛车整车参数及动力性能目标参数,对双电机参数、电池参数、传动比进行匹配设计;其次,建立电动方程式赛车模型及循环工况;最后,使用Cruise软件对电动方程式赛车进行赛事动力性、经济性工况仿真分析。分析结果表明,双电机动力系统能满足赛事需求,对电动赛车动力系统设计有一定指导意义。
关键词: 电动方程式赛车; 双电机动力系统; 赛车模型; 仿真分析; 参数匹配; 电机驱动
中图分类号: TN99?34 文献标识码: A 文章编号: 1004?373X(2019)15?0139?05
Design and simulation of Dual?motor power system for electric formula racing car
TONG Zhihui, WU Quanjun, YOU Yuanxiang
(School of Energy and Power Engineering, North University of China, Taiyuan, 030051, China)
Abstract: In comparison with the motor layout modes of existing electric formula cars, the dual?motor design scheme is determined by comprehensively considering the power system layout of the racing car. Firstly, the parameters of the whole racing car and the target parameters of the power performance are established, and the matching design of the double motor parameters, battery parameters and transmission ratio is carried out. Secondly, the model of the electric formula racing car and its circulating condition are established. Finally, the dynamic properties and economic conditions of the electric formula racing car are simulated and analyzed by means of Cruise software. The analysis results show that the dual?motor power system can meet the requirements of the racing event and has certain guiding significance for the design of electric car power system.
Keywords: electric formula car; dual?motor power system; racing car model; simulation analysis; parameter matching; motor drive
0 引 言
大学生方程式汽车大赛(FSAE)目的在于培养汽车行业乃至整个机械制造业的专业人才,为在校大学生提供一个创新实践平台。Formula SAE(FSAE)是一项由高等院校在校本科生和研究生组队参加的汽车设计与制造比赛[1]。动力系统作为比赛取胜的关键,在设计上必须兼顾动力性和经济性,旨在探索设计双电机动力系统。
1 电动方程式赛车动力系统布置形式
从电动方程式赛车的国内外发展来看,目前按照电机数量基本可以分为三大类,分别是单电机、双电机、四电机动力系统。
单电机驱动目前仍是国内主流的布置形式,单电机动力系统动力传递路线简单,路线为驱动电机、减速器、差速器、半轴、驱动轮。其结构与燃油车的动力系统布置相似,只是将发动机用驱动电机替换,保留机械式的差速器。这种布置形式无需任何控制策略,设计简单成本低廉[2],相比多电机的方案存在功率小、加速慢等不足之处。
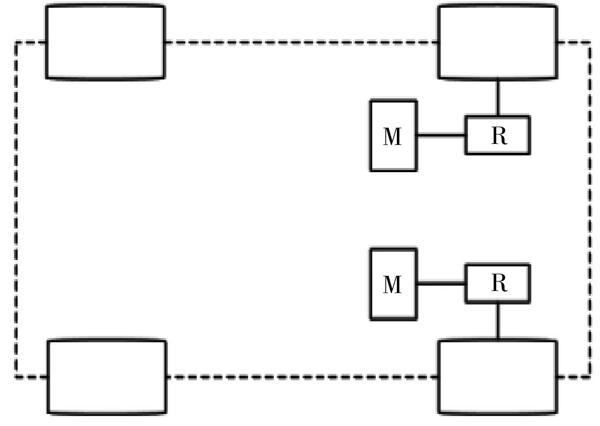
双电机后轮驱动方式无需机械式差数器,简化了传动系统机械结构[3]。两台电机通过行星齿轮减速结构分别控制后轴两个车轮,动力传递路线为驱动电机、减速器、半轴、车轮。赛车通过分别控制两个电机的转速来实现在过弯时的差速[4]。图1为双电机动力系统的示意图。
图1 双电机动力系统示意图
四电机有单电机和双电机动力系统无法比拟的优势,它能够充分利用地面的附着力提高赛车的操控性能。四电机驱动系统造价昂贵,并且对整车的控制精度要求极高,因此需要综合考虑赛车的动力系统布置形式。
双电机动力系统是一款非常适合大学生电动方程式赛车的驱动电机。相比单电机动力系统而言,双电机动力系统可以增加电机的负荷率,提高电机的工作效率,延长续驶里程[5]。
2 电动方程式赛车动力系统参数匹配
2.1 赛车整车参数以及动力性能目标参数
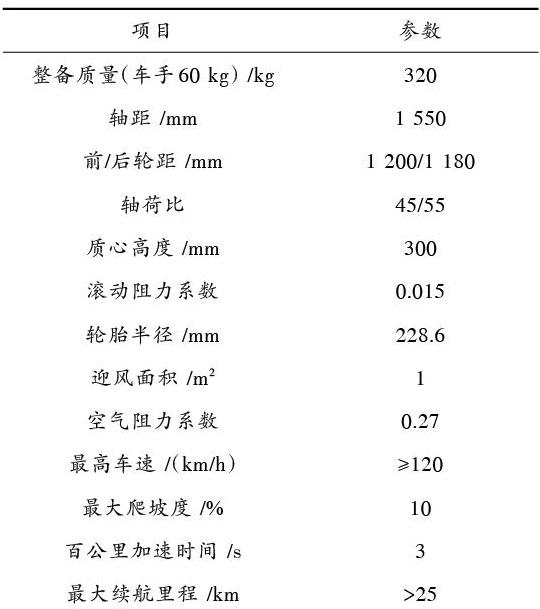
根据大赛的规则要求以及对动态项目的分析,结合设计经验,确定赛车的整车主要参数和赛车动力性目标参数如表1所示。
表1 赛车主要动力性目标参数
2.2 双电机参数匹配
根据赛车的最高车速[vmax]、百公里加速时间[T]、最大爬坡度[αmax]三个条件共同确定电机的峰值功率。电机额定功率对耐久赛中效率测试影响较大,根据电机的过载系数以及最高车速下的峰值功率可大致估计电机的额定功率。
1) 最高车速下赛车所需功率
赛车在良好路面加速至最高车速之后匀速行驶,不需要考虑加速阻力和坡度阻力功率,只考虑风阻和滚动阻力功率,根据汽车最高车速功率平衡方程,得到赛车所需功率[6][ Pmax1]为:
式中:[m]为整车质量(含车手60 kg);[η]为传动效率;[g]为重力加速度;[f]是滚动阻力系数;[vmax]是最高车速;[CD]是空气阻力系数;[A]是赛车迎风面积。
2) 根据起步加速时间计算所需功率:
汽车起步加速过程可由以下经验公式表示[7]:
赛车在整个百公里加速过程中,电机在加速末时刻输出的功率最大。所以,双电机功率之和只要大于加速过程末时刻所需要的功率,就可以满足整个百公里加速过程功率需求。根据动力性指标0~100 km/h,加速时间[T≤]3 s,计算加速末时刻需要的功率:
3) 根据赛车的最大爬坡度求所需功率
式中:[vi]是赛车爬坡速度,根据以往赛车耐久赛时的速度取[vi=60 km/h];[α]为最大爬坡度。
结合上述三种情况的分析得出赛车动力系统需要提供的总功率至少为:
计算可知[Pmax≥55 kW],所以,单个电机的峰值功率至少为27.5 kW。
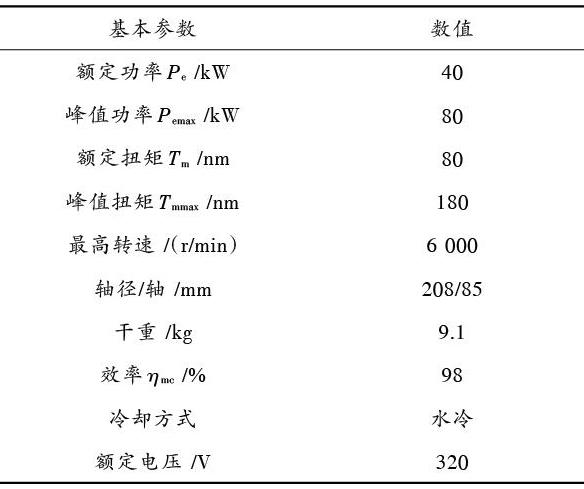
经对市场上的电机调研分析,考虑电机质量价格、性能等因素,此次设计决定采用永磁电机作为赛车的动力输出。永磁电機基本参数如表2所示。
表2 永磁电机的基本参数
2.3 电池参数匹配
本文采用等速法进行理论计算,根据车队以往参赛经验,假设电动方程式赛车以[ve](km/h)的速度匀速行驶,得到方程式赛车只受行驶阻力以及空气阻力作用下的阻力功率以及所消耗的能量如下:
式中:[Pe]为方程式赛车等速行驶所需的功率,单位为kW;[η]为电动方程式赛车的电器系统和机械系统效率;[Ws]为方程式赛车行驶[s]里程消耗的能量,单位为kW·h;[t]为赛车跑完整个耐久赛时间,单位为h。
电池组储存的能量必须大于电动方程式赛车行驶过程中消耗的能量:
式中[ξSOC]为电池组有效放电系数。[ξSOC=90]%电池组工作电压,必须大于或等于驱动电机的额定电压320 V,取电池组电压为370 V,电池组电压是由多个单体电池串联而成的,每个电池单体的电压为3.7 V,所以电池组串联的电池数约为:
电池组串联个数的计算满足电池组的电压要求,电池组除了满足电压要求还应该满足容量要求,根据电池组的容量需求计算电池组并联的组数[N]:
式中:[Ce]为电池单体额定容量,单位为A·h;[Ve]为电池单体电压,单位为V。
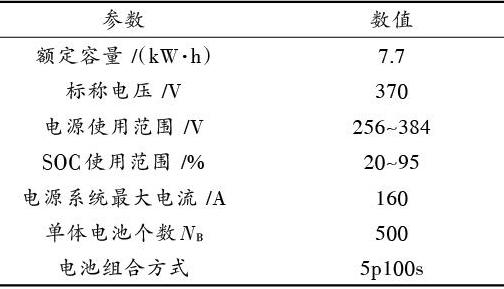
根据以上计算可知,电池组由5并100串电池单体组成。考虑到电动方程式赛车的轻量化设计要求,最后确定为格瑞普的聚合物锂离子电池,电池参数如表3所示。
表3 锂离子电池的基本参数
2.4 传动比匹配
电动机输出特性一定时,传动系的传动比需满足车辆最高车速,最大加速度及最大爬坡度的性能要求,并且使电机维持在高效率区间内运行[8]。
1) 确定传动比上限
为了满足赛车的最高车速要求,通过赛车的最高车速和电机的最高转速来确定传动比的最大值[9]。[imax≤0.377?nmaxrvmax] (12)
式中:[imax]为最大传动比;[nmax]为电机最高转速;[r]为车轮外径;[vmax]为最高车速。
2) 确定传动比最小值
由电机最高转速时的扭矩和最高车速对应的行驶阻力确定减速比最小值:
综合上面最大最小传动比的计算,可得传动比的区间为[0.6≤i≤4.3]。根据计算再参考国内双电机院校传动比的设计,最后确定传动比[i]=4。
3 纯电动方程式赛车建模与仿真分析
3.1 电动方程式赛车建模及循环工况的建立
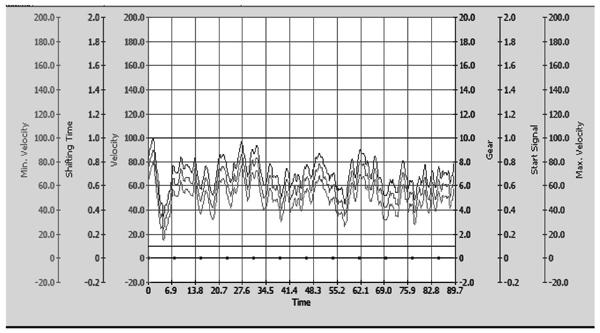
通过对双电机电动方程式赛车结构分析可知,在Cruise中建模需要用到整车车辆参数设置模块、电池模块、电机模块、减速器模块、轮胎模块、制动器模块、驾驶室模块等子模块。针对实际赛道建立高避的仿真工况,采用时间和速度作为参数输入,生成循环工况的曲线图,如图2所示。
图2 循环工况曲线图
3.2 仿真結果与分析
1) 全负荷加速性能仿真结果与分析
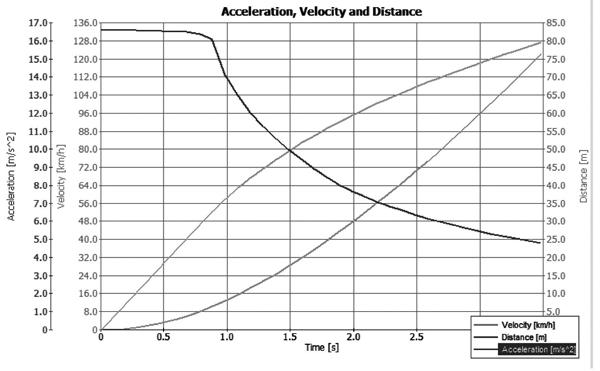
75 m直线加速的仿真结果如图3所示,整个75 m直线加速过程用时3.5 s,尾速达到126 km/h,最大加速度为16.5 m/[s2],满足预期设计要求。
图3 0~75 m直线加速曲线
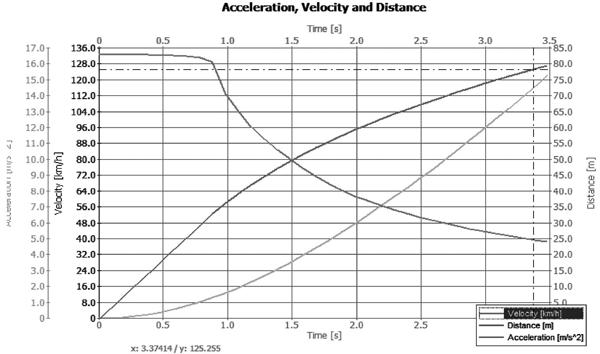
2) 最高车速仿真结果与分析
全负荷最高车速仿真结果如图4所示,最高车速为127 km/h,满足最高车速设计目标。
图4 最高车速仿真结果
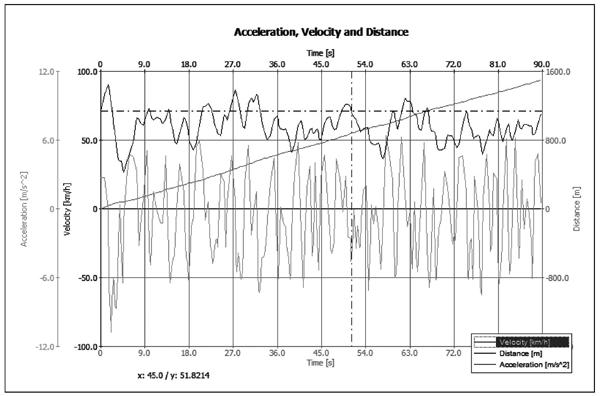
3) 赛车赛道工况仿真结果与分析
赛车高速避障过程如图5所示,平均时速约为[55 km/h],加速度在[-6]~6 [m/s2]。
图5 赛道工况车速、加速度时间曲线
4) 循环工况仿真结果及分析
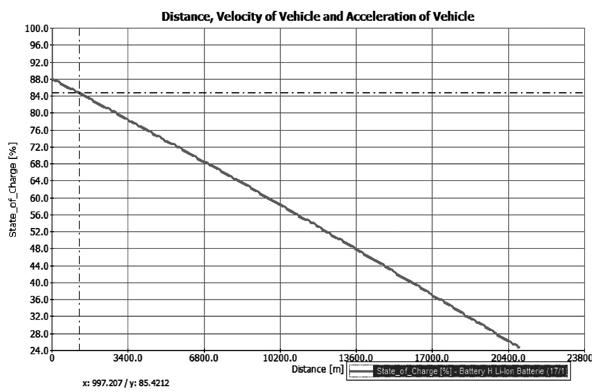
电动方程式赛车在FSAE工况下循环14次以后,电池SOC数值随着耐久赛进行的变化曲线如图6,图7所示,电池最终的剩余电量为25%,证明电池容量设计完全能满足耐久赛的要求[10]。
图6 赛车运行14次FSAE工况
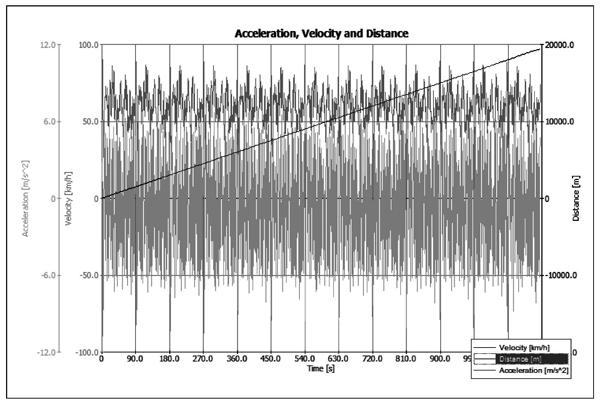
图7 电池组SOC变化曲线
本文用Cruise软件建立了双电机动力系统赛车整车模型,针对方程式比赛项目设计了对应的仿真工况,其中高避和耐久的仿真工况依据2017年赛车在襄阳赛道采集的数据所建立。
4 结 语
依托中北大学赛车研发项目,设计双电机赛车动力系统,对电机参数、传动比、电池组容量及组数进行匹配设计,并在Cruise软件中根据比赛项目建立相应的仿真工况。仿真结果显示75 m直线加速时间3.5 s,赛车最高车速126 km/h,完成耐久赛之后电池的剩余电量为25%,各项仿真结果均满足预期目标值。验证了前期设计计算与仿真模型的正确性,并证明了所设计的动力系统能满足赛事需求。研究成果将成为今后电动方程式赛车动力系统设计的理论依据。
参考文献
[1] 中国汽车工程学会.中国大学生方程式汽车大赛规则[EB/OL].[2017?02?25].https://www.docin.com/p?2058166260.html.
China Automobile Engineering Society. Chinese university formula car competition rules [EB/OL]. [2017?02?25]. https://www.docin. com/p?2058166260.html.
[2] 张明亮.FSE电动方程式赛车动力系统性能研究[D].重庆:重庆大学,2015.
ZHANG Mingliang. Research on performance of FSE electric formula racing power system [D]. Chongqing: Chongqing University, 2015.
[3] 赵广宣.纯电动汽车动力传动系统匹配与整体优化研究[D].南京:江苏大学,2017.
ZHAO Guangxuan. Research on matching and overall optimization of pure electric vehicle powertrain [D]. Nanjing: Jiangsu University, 2017.
[4] HADDOUN A, BENBOUZID M E H, DIALLO D, et al. Comparative analysis of control techniques for efficiency improvement in electric vehicles [M]. [S.l. : s.n.], 2007.
[5] 毕聪.新型纯电动汽车双电机动力系统研究[D].南京:南京航空航天大学,2014:4?7.
BI Cong. Research on dual?motor power system of new pure electric vehicle [D]. Nanjing: Nanjing University of Aeronautics and Astronautics, 2014: 4?7.
[6] 余志生.汽车理论[M].北京:机械工业出版社,2019:2?90.
YU Zhisheng. Automotive theory [M]. Beijing: China Machine Press, 2019: 2?90.
[7] 赵又群,李佳.plug?in混合动力汽车动力系统参数匹配[J].运用基础与工程科学学报,2011(19):459?464.
ZHAO Youqun, LI Jia. Parameter matching of powertrain in a plug?in hybrid electric vehicle [J]. Journal of basic and engineering science, 2011(19): 459?464.
[8] 郭孔辉,姜辉,张建伟.电动汽车传动系统的匹配及优化[J].科学技术与工程,2010(16):3892?3896.
GUO Konghui, JIANG Hui, ZHANG Jianwei. Power?train matching and optimization of electric vehicles [J]. Science and technology and engineering, 2010(16): 3892?3896.
[9] 姬芬竹,高峰,吴志新.电动汽车传动系参数设计及动力性仿真[J].北京:北京航空航天大学学报,2006,32(1):109?111.
JI Fenzhu, GAO Feng, WU Zhixin. Parameter design for power train and simulation of dynamic performance of electrical vehicles [J]. Journal of Beijing University of Aeronautics and Astronautics, 2006, 32(1): 109?111.
[10] REN Q, CROLLA D A, MORRIS A. Effect of geared transmissions on electric vehicle drivetrains [C]// ASME 2009 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. [S.l.]: ASME, 2009: 959?966.