群智优化路径技术在风景园林规划设计中的运用
2019-08-12芮潇刘晓青
芮潇 刘晓青
摘 要: 风景园林规划设计过程中计算机辅助技术起到了越来越大的作用,特别是在园林道路路径设计方面,有效的最短路径规划可以提升游客的体验。因此,提出一种基于群智优化的dijkstra最短路径规划算法。首先基于风景园林应用创建环境地图;然后对典型的dijkstra最短路径算法进行分析;最后采用群智优化对dijkstra最短路径算法进行改进,并给出信息素浓度更新的方法。仿真测试结果表明,相比传统dijkstra算法,提出的群智优化算法的路径长度更小,可以有效满足园林道路规划的需求。
关键词: 风景园林; 最短路径规划; 群智优化技术; dijkstra算法; 蚁群算法; 信息素浓度
中图分类号: TN02?34 文献标识码: A 文章编号: 1004?373X(2019)15?0106?03
Application of group intelligence optimization path technology
in landscape architecture planning and design
RUI Xiao, LIU Xiaoqing
(School of Architecture & Artistic Design, Southeast University Chengxian College, Nanjing 210000, China)
Abstract: Computer?aided technology plays an important role in the planning and design of landscape architecture. Especially for the design of architecture path, the effective shortest path planning can improve the experience of tourists. Therefore, a dijkstra shortest path planning algorithm based on group intelligence optimization is proposed. An environmental map is created on the basis of landscape architecture applications. The typical dijkstra shortest path algorithm is analyzed. The dijkstra shortest path algorithm is improved by using group intelligence optimization, and the method of pheromone concentration update is given. The simulation test results show that, in comparison with the traditional dijkstra algorithm, the proposed group intelligence optimization algorithm has shorter path length, and can effectively meet the needs of architecture road planning.
Keywords: landscape architecture; shortest path planning; group intelligence optimization technology; dijkstra algorithm; ant colony algorithm; pheromone concentration
0 引 言
傳统的风景园林规划设计方法主要依靠不断积累和完善的设计师经验。对于大型的风景园林规划应用,设计师必须具备扎实的设计理论、专业的设计技能以及广泛的艺术修养[1?3]。随着计算机辅助设计发展逐步完善,各种智能化的协助方法不断出现,使得风景园林规划设计更加人性化、智能化和完善化。相较于传统的凭经验选线方法,基于计算机辅助设计的选线方法更为科学、准确、高效、可操作性强[4]。目前,基于计算机辅助算法的参数化设计方法逐步形成,使得逻辑构建过程设计研究成为该领域研究的热点,参数化方法的使用为风景环境道路选线提供了可靠的科学依据。
风景环境的道路选线是一项多目标的系统性工程。现阶段对于园林风景设计中的道路选线研究主要分为以下几个方面:
1) 基于流程图和表格的园林设计方法,主要将可拓学引入园林设计之中,构成可拓园林设计[5];
2) 基于参数化的风景环境道路选线方法,主要分为栅格模型与矢量模型两种表示模型[6?7],其道路选线主要利用基于ArcGIS软件平台的道路选线算法,进行计算与分析的对象为栅格模型,主要采用成本距离、路径距离与成本路径三个算法。本文的研究方向为参数化风景环境道路选线中的路径距离最小化算法。
在以上研究的基础上,本文设计一种基于群智优化的dijkstra最短路径规划算法。风景环境道路选线算法的应用仿真测试结果表明,相比传统算法,本文提出的路径规划算法具有较高的准确性和工作效率。
1 风景环境道路选线模型
1.1 创建风景园林环境地图
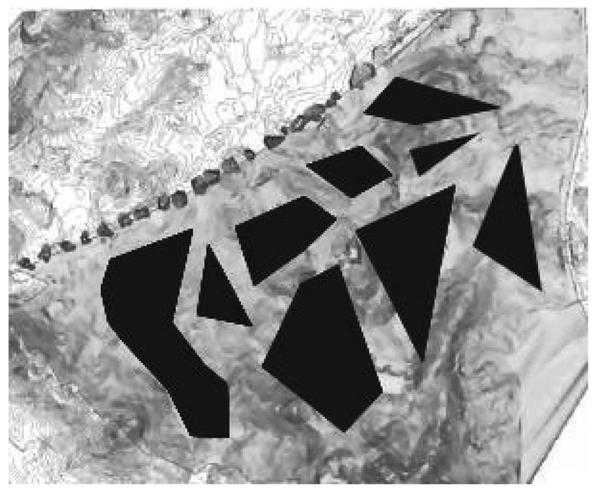
以某省会山丘风景区的部分片区规划为例,构建风景园林环境地图,大小为5 000 m×5 000 m的矩形,其中黑色多边形表示风景区内的不同景点区域,视为障碍区域,如图1所示。
图1 风景园林环境地图建模
假设园林环境为[W],边界为[WSB],区域内的所有多边形障碍区域为[Qi],则:
1.2 Dijkstra最短路径算法
本文选择的研究方向是基于路径距离算法的风景园林规划道路选线模型,如图1所示。目前,最典型的最短路径算法是Dijkstra算法[8],此算法用于解决单源最短路径问题。因此,设定源点[S]和终点[T]后,采用Dijkstra算法寻找风景环境道路选线的初值,在图1中找出从[S]到[T]的最短路径。
2 基于群智优化的全局最短路径研究
2.1 提出的蚁群优化算法
采用群体智能算法对dijkstra最短路径算法进行改进,具体的群体智能算法为典型的蚁群算法[9]。将基于Dijkstra算法获得的初始路径作为蚁群算法的初值以便进行优化。设点[S],[P1],[P2]等为初始路径的不同节点。[Pi1]表示道路选线段的起始节点,[Pi2]表示道路选线段的结束节点,则该条道路选线段上任意一点就可以表示为:
3 仿真实验
3.1 實验环境
为了对本文提出的群智优化dijkstra最短路径规划算法进行验证,进行了仿真测试。仿真硬件环境为: Intel[?] Core i7 2.8 GHz四核CPU,8 GB内存。仿真软件环境为Windows 7操作系统,Matlab 7.0仿真软件。
3.2 蚁群搜索路径示例
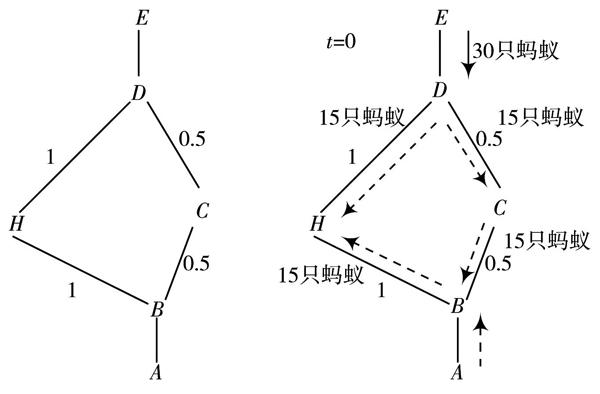
种群数量为30且信息素初始浓度为0.2时,蚁群算法实现路径搜索的示例如图2所示。可以看出,每只蚂蚁在时刻[t]留下浓度为1的信息素,当路径上还没有信息素时,所有蚂蚁会随机地选择路径前进。
3.3 性能对比
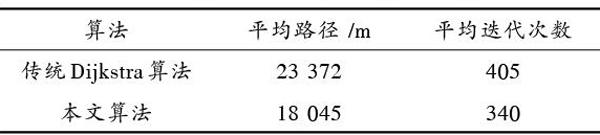
为了验证本文提出算法的性能,在相同环境条件下,分别对本文算法与传统Dijkstra算法进行对比实验。两种不同算法得到的最优规划长度如表1所示。从表1可以看出,相比传统Dijkstra,本文算法得到的规划路径长度更小。也就是说,在与风景园林地形地貌相契合的条件下,群智优化dijkstra平均路径规划算法得到的道路选线是最短的,体现出路径规划的科学性和高效性。
图2 蚁群搜索路径示例
表1 路径规划结果对比
4 结 论
本文提出一种基于群智优化的dijkstra最短路径规划算法。在对典型的dijkstra最短路径算法进行分析后,采用群智优化对dijkstra最短路径算法进行改进,并给出了信息素浓度更新的方法。得出如下结论:相比传统方法,本文提出方法的规划路径长度更小,鲁棒性更高;提出方法可以有效满足园林道路选线的需求。但是不同种群数量和信息素初始浓度对道路选线的性能影响需要进一步研究。
参考文献
[1] 王长柳,麦贤敏,赵兵,等.风景园林合理分布三维图像仿真系统设计[J].计算机仿真,2017,34(8):265?268.
WANG Changliu, MAI Xianmin, ZHAO Bing, et al. Design of 3D image simulation system for rational distribution of landscape architecture [J]. Computer simulation, 2017, 34(8): 265?268.
[2] LAWSON L. The planner in the garden: a historical view into the relationship between planning and community gardens [J]. Journal of planning history, 2016, 3(3): 151?176.
[3] SILVA C N. Garden cities and colonial planning: transnationa?lity and urban ideas in Africa and Palestine [J]. Planning perspectives, 2016, 30(1): 1?10.
[4] BIGON L, KATZ Y. Garden cities and colonial planning [J]. Planning perspectives, 2017, 30(1): 1?10.
[5] 徐思婧,朱建宁.基于可拓学的风景园林设计方法研究[J].中国园林,2016(8):52?57.
XU Sijing, ZHU Jianning. Research on landscape architecture design method based on extenics [J]. Chinese garden, 2016(8): 52?57.
[6] 龚定文.风景园林规划中园林道路的设计[J].现代园艺,2015(2):62.
GONG Dingwen. Design of garden roads in landscape architecture planning [J]. Modern horticulture, 2015(2): 62.
[7] 袁旸洋,成玉宁.参数化风景环境道路选线研究[J].中国园林,2015(7):36?40.
YUAN Yangyang, CHENG Yuning. Research on road selection of parametric landscape environment roads [J]. Chinese garden, 2015(7): 36?40.
[8] ZHANG J D, FENG Y J, SHI F F, et al. Vehicle routing in urban areas based on the oil consumption weight?Dijkstra algorithm [J]. IET intelligent transport systems, 2016, 10(7): 495?502.
[9] QIANG Y, CHEN W N, YU Z, et al. Adaptive multimodal continuous ant colony optimization [J]. IEEE transactions on evolutionary computation, 2017, 21(2): 191?205.