水下结构光测量系统的快速扫描
2019-08-10解则晓孟飞龙
解则晓 孟飞龙

摘要:现有的水下结构光测量技术存在扫描速度慢的问题,无法实时获得被测物体的信息。而水下机器人在自主作业时想要能够及时地调整机械抓手,就要求扫描测量的时间越短越好;只有扫描时间远短于水下机器人的自身调整时间,瞬时获得被测物体的三维信息,才能实时地操作抓手完成抓取等任务。本文采用高帧频相机,扫描过程中连续采集图像,扫描完成后直接对图像信息进行处理。与常规的扫描系统相比,本文所提出的快速扫描在采集图像时每一帧仅需6.67毫秒,极大地提高了扫描效率。
关键词:结构光技术;水下测量;快速扫描;高帧频相机
中图分类号:TP391.41 文献标识码:A
文章编号:1009-3044(2019)17-0258-03
开放科学(资源服务)标识码(OSID):
Abstract: The existing underwater structured light measurement technology has the problem of slow scanning speed, and can not obtain the information of the measured object in real time. However, if the underwater vehicle wants to be able to adjust the mechanical grip in time, the shorter the scanning time is, the better; only the scanning time is much shorter than the self-adjusting time of the underwater vehicle, and the three-dimensional information of the measured object can be obtained instantaneously. In order to operate the grip in real time to complete tasks such as grasping. In this paper, a high frame rate camera is used to save the image information but not store it in the scanning process. after the scanning is completed, the image information is processed directly. Compared with the conventional scanning system, the fast scanning proposed in this paper takes only 6.67 milliseconds per frame when collecting the image, which greatly improves the scanning efficiency.
Key words: structured light technology; underwater measurement; fast scanning; high frame rate camera
隨着对海洋环境的不断深入探索,视觉引导的水下机器人应用越来越广泛[1-3]。结构光三维测量技术[4]在水下不需要复杂的匹配问题,更易于水下应用。但是水下机器人想要及时地调整自身及机械手就需要扫描过程要高效,即时间短却又能得到大量的信息。常规的结构光扫描测量系统在控制激光移动后让相机拍摄存图,花费的时间过多;本文借助高帧频basler相机在扫描过程中只拍摄和控制激光,在完成扫描后将图像信息直接进行处理,省去了硬盘存储时间,使得扫描效率得到了明显的提高。常规的结构光扫描系统拍摄每幅图像需要15ms左右的时间,本文提出的快速扫描在受到硬件限制的情况下拍摄每幅图像仍仅需6.67ms的时间。
1 快速扫描原理及其算法实现
1.1 高帧频相机及其工作模式
近年来工业相机发展迅猛,USB3.0接口的工业相机已得到了广泛应用。摄像机可以说是结构光系统最重要的构成元件,它的性能直接影响了整个系统的测量精度。除了考虑图像分辨率、图像质量外,由于希望系统在水下快速扫描工作,因此摄像机还必须能够快速采集、同步传输、高信噪比。随着工业相机的快速发展, USB3.0接口的工业相机近年来得到越来越广泛的应用。本文选取德国著名工业相机厂商BASLER生产的acA1300-200um USB 3.0相机,最高帧速率达到203fps,分辨率为1280 px × 1024 px即130万像素,同时具备非常优良的性能,配带功能强大的软件开发包。
水下机器人要实时获取被测物体的三维信息,需要系统能够快速扫描测量。系统扫描测量的速度是评价系统性能的重要指标。一定范围内,扫描速度越快系统性能越好,同时扫描速度越快对硬件要求越高。本文选取的BASLER生产的acA1300-200um USB 3.0相机,在满帧频状态下工作可以满足系统的快速扫描要求。
相机每秒拍摄的图像数叫作帧频,单位为fps。本文选用的acA1300-200um USB 3.0相机的最大帧频可达203fps,但受到工控机USB3.0接口的传输速率的限制,只能达到150fps左右,但仍然是非常高的采集速度。摄像机拍摄是在曝光时间内的某一刻进行采集,通常相机拍摄时选取的工作模式是LatestImageOnly模式,即只有在确定拍摄时才会采集一幅图像,采集的是相机最后一次曝光时所采集的图像。此模式下实现激光扫描,须在图像采集结束并存储后,控制激光移动,因此采集的图像越多激光移动所占用的时间就越多。BASLER相机软件开发包提供了一种相机曝光时间结束事件的工作模式,这是在OneByOne模式下连续采集的方案。
相机在OneByOne工作模式下让其满帧频工作,调小其每一帧采集图像时的曝光时间,使得连续采集图像时每帧都留有一段时间,此时控制激光移动。每次采集图像时,摄像机在曝光结束后会发送信号,工控机接收信号后对相机的曝光时间结束事件进行处理即控制振镜定量转动,并将采集到的图像信息存入缓存流中,然后执行下一帧的拍摄。通过这种并行运行方式可以节约大量时间从而实现快速扫描。
1.2 快速扫描的算法实现
本文采取的结构光测量系统快速扫描的算法实现流程如图1所示。借助相机的库函数完成如下任务。首先对相机进行初始化PylonInitialize操作,获取当前所连接相机服务;申请曝光结束事件ExposureEnd,并开辟缓存区申请流存储服务StreamGrabber来实时存取图像;让相机处于连续AcquisitionMode状态,并在曝光结束时回调endOfExposureCallback函数执行控制激光移动任务。拍摄完成后从缓存中读取所有拍摄图像的信息以执行其他任務。
此工作流程实际上是在连续拍摄的工作模式下压缩了相机的曝光时间,在拍摄时间内同时完成了控制激光和保存图像的工作,因此扫描过程不能中断否则拍摄图像与激光移动无法同步。
2 实验结果与结论
水下结构光测量系统的实物图如图2所示。系统工作时,首先在陆上进行相机及振镜系统参数的标定以获得图像坐标与世界坐标的转换关系。扫描时,振镜在电机的带动下均匀转动,激光经过振镜反射以二倍于振镜转动的速度扫描物体,每次转动的控制电压可知因而转动角度可知,将振镜坐标系转化到相机坐标系,完成系统参数标定,实现陆上三维扫描测量。在水下扫描时,由于光在不同介质中传播会发生折射,因此需要对摄像机光路及激光平面在水下的部分进行折射补偿。为了检验快速扫描的有效性,需要对相机进行标定[5],对结构光系统的内外参数进行标定[6,7],同时在水下环境实验需要进行折射补偿[8,9]。通过上述步骤后就能在水下环境进行扫描实验验证快速扫描的性能。
与现有的扫描方式相比,快速扫描方式的扫描速度有明显优势。调节摄像机的曝光时间为5ms,振镜需要1ms左右的时间接受信号并做出反应,以拍摄100幅图像所花费的时间对两种扫描方式进行比较。在相机的普通工作模式下,曝光结束后控制振镜转动,随后保存图像,所有的事件共计需2.87秒左右;而在曝光时间结束事件的工作模式下,由于振镜转动与存储图像信息是同步的,因此在满帧频状态下拍摄即在150fps的条件下,相机的曝光时间最大为6.67ms,将其减小为5ms,剩余的1.67ms执行控制振镜转动任务,因此拍摄100幅图像仅需0.67s左右,使得扫描速度得到显著的提高。并且拍摄的图像数目越多越能体现快速扫描的优势。
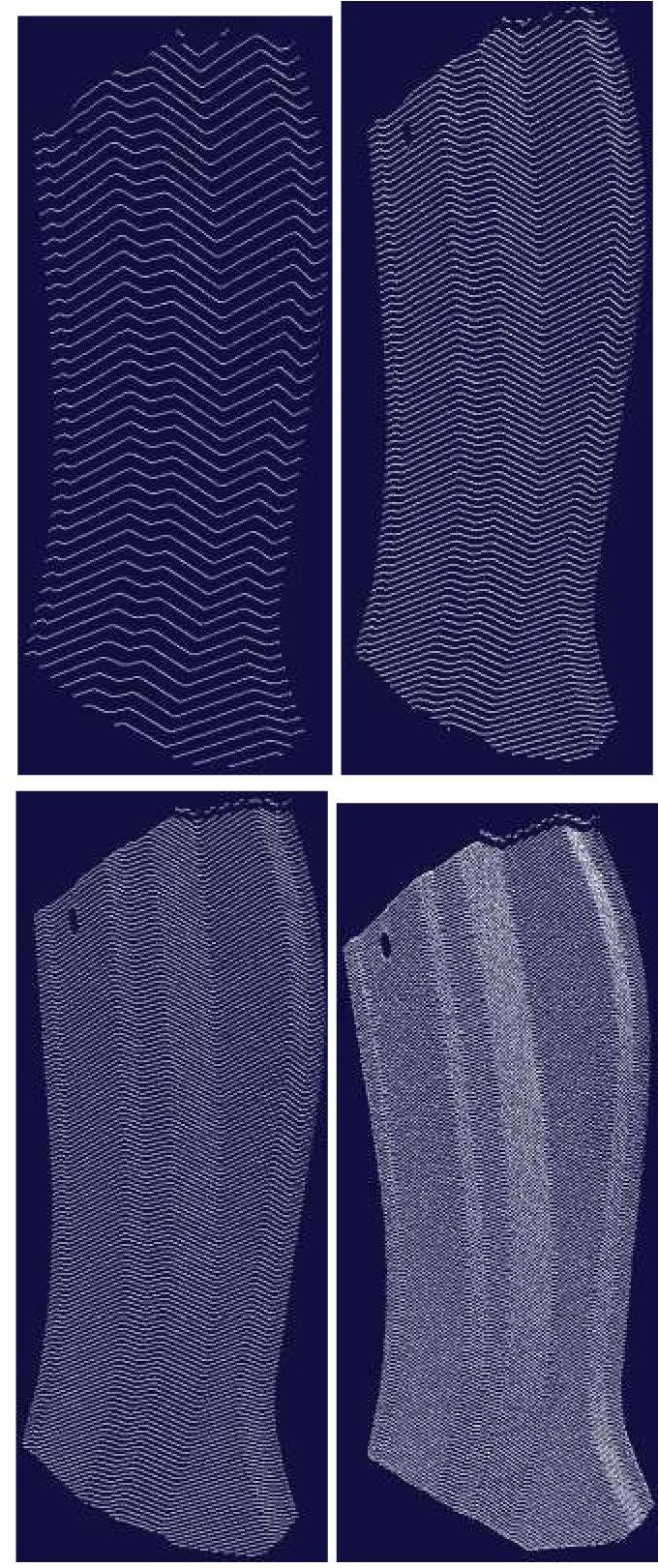
在水下环境中扫描如图3所示的不规则工件,将采集到的图像信息即点云数据用逆向工程软件imageware读取,不同图像数目的扫描结果如图4所示,可以看出,随着图像采集的数目增加,扫描结果越能表现工件特征想要较好地表征出此钣金件的特征,扫描采集200幅图像时比较清晰。在常规的结构光扫描系统下拍摄200幅图像需要3s左右的时间,而快速扫描仅需要1.3s左右,极大地提高了扫描速度,能够较好地满足水下机器人实时获取周围信息的需要。本文所提出的结构光测量系统的快速扫描能够高效率采集信息,具有较高的实用价值。
参考文献:
[1] Mario Prats,David Ribas,Narcís Palomeras,Juan Carlos García,Volker Nannen,Stephan Wirth,José Javier Fernández,Joan P. Beltrán,Ricard Campos,Pere Ridao,Pedro J. Sanz,Gabriel Oliver,Marc Carreras,Nuno Gracias,Raúl Marín,Alberto Ortiz. Reconfigurable AUV for intervention missions: a case study on underwater object recovery[J]. Intelligent Service Robotics,2012,5(1).
[2] 毕晓琳.海洋科技发展在现代海洋经济发展中的作用[J].海洋信息,2010(3):19-22.
[3] 张洪欣,马龙,张丽婷,等.水下机器人在海洋观测领域的应用进展[J].遥测遥控,2015,36(05):23-27.
[4] Yaoyu Ding,Xuebiao Zhang,Radovan Kovacevic. A laser-based machine vision measurement system for laser forming[J]. Measurement,2016,82.
[5] Zhang Z. A flexible new technique for camera calibration [J].Pattern Analysis and Machine Intelligence, IEEE Transactionson, 2000, 22(11): 1330-1334.
[6] 江永付,江开勇,林俊义.线结构光光条中心亚像素精确提取方法[J].激光与光电子学进展,2015,52(07):185-191.
[7] 解则晓,迟书凯,王晓敏,等.基于共面法的结构光自扫描测量系统参数标定方法[J].中国激光,2016,43(03):182-189.
[8] 解则晓,刘鹏.基于折射补偿的水下结构光三维测量系统[J].光电子.激光,2012,23(04):745-750.
[9] 解则晓,李绪勇,辛少辉,等.水下线结构光自扫描三维测量技术[J].中国激光,2010,37(08):2010-2014.
【通联编辑:梁书】
