工程车低速自动跟车系统研究
2019-08-09马林峰石可民曹润兴
马林峰,石可民,曹润兴,马 悦
(武汉理工大学 汽车工程学院迅能工作室,武汉 430070)
我国幅员辽阔,公路需求量巨大,但传统铺路修路施工缓慢且成本、耗时都居高不下。不仅如此,公路损伤速度非常快,高速路、一级公路寿命也只有15年,每年公路铺设和维修里程量巨大。施工中也存在很大的问题:①道路施工和养护流程繁琐,车队车速缓慢(6 m/min左右),工作过程缓慢,工作时间长、压力大;②工作环境恶劣,施工环境温度高(150℃左右),沥青是有毒物质,长期工作对施工人员身体健康有害。2017年,世界卫生组织将铺路时职业暴露于直馏沥青及其排放物列在2B类致癌物清单中。
本文采用车辆简化模型[1]建立几何关系,采用leader-follower模型[2-3]建立控制器,采用时变角度[4]和固定距离来计算,优化误差模型以研究一种新型方法为道路施工与养护提供新型的完善措施和选择,为打造中国基建新名片做出努力。
1 车辆控制系统概述
1.1 车辆控制策略
目前,没有研发出让人信赖甚至依赖的自动驾驶技术,为降低研发难度,本系统前车采用人工驾驶以保证行驶精度,后车采用自动跟随的控制策略。既保证驾驶准确性与可靠性,又能大幅减少劳动强度,控制策略如图1所示。

图1 控制模型Fig.1 Control model
前车人工驾驶,自带的传感器记录前车的驾驶操作,这些信息作为主信号,实时发送给后车,后车接收储存,延迟一段时间后(大概120 s左右)通过控制机构操作后车运动。后车执行过程中会产生误差而引起运动偏差,采用leader-follower模型根据固定的期望距离和时变的期望角度修正误差,输出期望的横向和纵向速度作为副信号[5]来修正后车的运动状态,从而对后车进行闭环控制以提高控制的稳定性和可靠性。
1.2 信号记录
主信号:方向盘旋转角度、油门大小等。
副信号:两车实时偏转角度、两车实时纵向速度和横向速度、两车中心点距离。
角度测量使用角度传感器实时记录传输给后车;油门大小可直接在汽车CPU处获得,具体获得方式视车辆而定;
航向角度测量使用陀螺仪,通过对陀螺仪的角速率进行动态姿态算法,实时输出物体的水平方位角度;记录当前驱动轮转速,若为后轮驱动,则纵向速度即为驱动轮转速,若为前轮驱动,根据前轮偏转角与转速可计算得出纵向速度;横向速度可根据轴距和车辆航向角变化率来计算(下文式(2))。
1.3 信号传输
两车之间信息传递采用ZigBee协议[6],它是一种短距离传输的无线网上协议,具有低功耗、低成本、近距离、短时延的优势,十分符合低速自动跟车系统通信的需要。
2 车辆模型的建立
2.1 车辆参数关系
先在特定状态下建立车辆模型如图2所示,假定的条件为车辆只有2根轴、4个车轮,前轮为转向轮,后轮为驱动轮。

图2 车辆模型Fig.2 Vehicle structure
图中:(XL,YL)为工程车中心点坐标;αL为航向角,即与x轴正方向的夹角;δL为轮胎转角,即前轮与主轴方向的夹角;vL和ωL为车辆纵向速度和横向速度。
计算各参数之间关系可得:

2.2 前后车相对关系
工程车施工过程中有许多辆车跟车行驶,这也是我们研究工程车自动跟车系统的重要原因,但是在设计过程中,为了简化计算,选取其中的两辆车建立车队系统模型。并据此分析误差系统,为之后控制器的设计做铺垫。条件与前一个模型一样,模型如图3所示。
图中:(XF,YF)为跟随工程车中心点坐标;αF为跟随车航向角,即与x轴正方向的夹角;δF为跟随车轮胎转角,即前轮与主轴方向的夹角;vF和ωF为跟随车纵向速度和横向速度;Xr为跟随车的车辆坐标系横坐标轴,Yr为跟随车辆的车辆坐标系纵坐标轴;L为前后车中心点实际距离,Lx为L在车辆坐标系x轴方向上的投影,LY为L在车辆坐标系Y轴上的投影;Ψ为前车主轴与L的角度;β为L与绝对坐标系x轴正方向的夹角;γ为L与车辆坐标系x轴正方向的夹角;
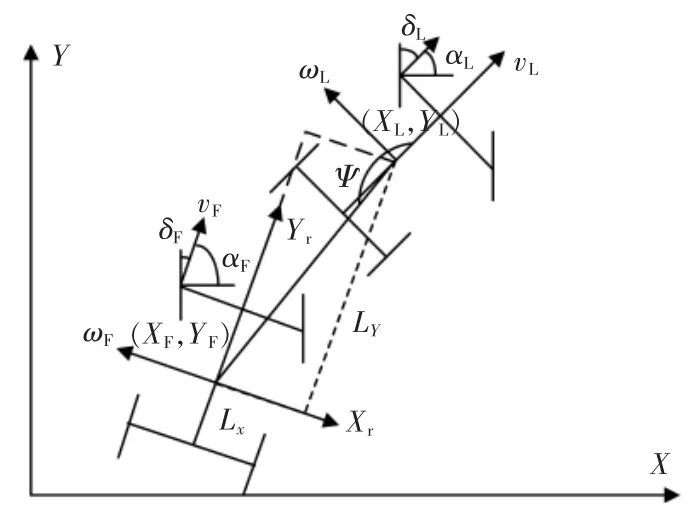
图3 车辆相对位置模型Fig.3 Relative position of vehicle
根据图中几何关系可知:

其中:

对机构进行简化放大,如图4所示。
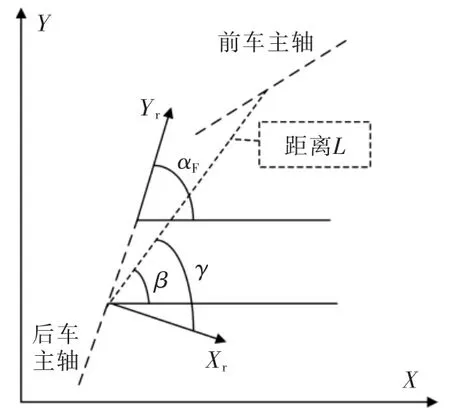
图4 简化模型Fig.4 Simplified model
因此可推算出:

结合式(4)、式(5),可得:

由此算出前车主轴与L的夹角,为之后计算实时期望夹角提供方法。
3 误差模型的建立
为满足跟随领航的需要,需要保证两车实际距离趋向于期望距离,实际角度趋向于期望角度。
实际应用中,因为实际距离与实际角度关系复杂,直接利用期望距离减去实际距离建立误差模型较为复杂。据此,本文将期望与实际距离分解到跟随车辆坐标系两坐标轴上,用两距离在Yr和Xr上的投影相减建立距离误差模型。
角度误差方面,文献[1]~文献[3]均采用期望角度直接与实际角度相减,但对于自动跟车行驶来说,前后两车的领航角一般是在变化的(比如前车进入弯道,而后车还未进入弯道等情况),所以上述建立的角度误差模型不能适应一般跟车情况,只能适应两车轨迹平行[7](低速跟车要求轨迹重合)且期望距离不变的情况,因此需要对文献模型优化。文献[4]采用时变的距离与角度,一方面,他的时变角度计算方法复杂;其次,实际距离要求不严,无需采用时变。
低速自动跟车系统要求的是后车追随前车运动,并基本保持实际距离趋向期望距离,也就是后车轨迹是对前车轨迹的复现,只是延迟了一定时间。本文采用前车实时记录自身的转向角度,然后用前车现在的领航角和延迟时间之前的前车领航角来计算此时前车与后车应有的期望角度。
因此角度误差模型应该是延迟时间之前的前车领航角与现在的后车车辆领航角的差值,具体误差模型如下:

式中:E1为期望距离与实际距离的差值在车辆坐标系Yr轴上的投影;E2为期望距离与实际距离的差值在车辆坐标系Xr轴上的投影;E3是延时时间之前的前车领航角和现在后车领航角的差值;αL′为延时间之前的前车领航角;αF为现在的后车领航角。
4 控制器的设计
利用Lyapunov算法设计控制器[1,8]。
根据上节中建立的误差模型,对其进行求导之后,进行移项得到下式:

其中M为协调补充:

5 运动状态分析和模型搭建仿真
5.1 运行参数选取和状态分析
首先确定:车长8 m,即d=4;纵向车速6 m/min,即0.1 m/s;横向速度为0.01 m/s;期望距离为12 m;领航车初始坐标(0,0),跟随车(-12,0),因此设定延迟时间为120 s;模型输入:前车纵向速度保持0.1 m/s不变,横向速度为150 s后,以0.001 m/s2加速,10 s后达到0.01 m/s,然后保持不变运动10 s,之后以0.001 m/s2减速,直至横向速度减为0,模型如图5所示。
设身处地为游客着想,明确乡村旅游的真正目的与意义。其中首要任务是健全基础设施,保障游客基本的安全与卫生要求。通过采访、问卷的形式了解周边地区游客的需求,从而有针对性地开展活动和提供服务,提高游客满意度和市场美誉度。此外,还应挖掘乡村旅游的潜在市场,如联系周边城市中小学,共同开展农事体验、农业知识科普活动。

图5 仿真模型Fig.5 Simulation model
5.2 模型搭建
篇幅有限,因此仅对延迟模块进行分析,延迟模块中首先有3个输入:角度 L、XL、YL;由式(5)、式(7)式可知:

因为是依据前车现在的角度和延迟时间之前的角度来计算前后车期望角度,因此用延迟时间之前的前车横纵坐标(XL′,YL′)替代(XF,YF)。
输入的横纵坐标数据延迟120 s,然后使用arctan计算β的值,通过式(7)计算此时的期望角度。arctan 函数输出值为(-π/2,π/2),但是β实际大小范围应为(-π,π),因此对输入的两组坐标进行比较大小:
当XL>XL′,YL>YL′,此时不需要改变β的值;
当XL
当XL>XL′,YL 当XL 之后利用式(7)计算出所需的期望角度,模型如图6所示。 图6 延迟模块Fig.6 Delay module 搭建完模型之后,结果如图7所示。 图7 轨迹图Fig.7 Track diagram 控制器中为保证数据稳定,经反复调试之后,设置参数 C1=1.0;C2=3.8;C3=0.01;C4=0.00001。 由图7可知,领航车轨迹曲线与跟随车轨迹曲线基本贴合,说明控制系统稳定且输出准确。值得注意的是,在图中很明显可以看到领航车轨迹右边比跟随车轨迹长、左边短,这是因为领航车初始坐标为(0,0),跟随车初始坐标为(-12,0),且跟随车动作比领航车慢120 s,因此仿真停止时,跟随车没能走过领航车全部轨迹。 再看图8~10所示的误差曲线,可以看出纵向误差和横向误差都在10-3的量级上,误差很小,角度误差最大为0.035 rad(2°),都在允许范围之内。分析3条误差曲线可知,误差在开始阶段快速增加,但短时间内快速衰减为0,并保持稳定,说明仿真结果符合低速自动跟车行驶的需要。 图8 纵向误差Fig.8 Longitudinal error 图9 横向误差Fig.9 Lateral error 图10 角度误差Fig.10 Angle error 考虑噪声的仿真模拟,实际道路中会产生许多振动和冲击,因此仿真中应当考虑加入一些白噪声来模拟干扰,通过对输入车辆横向速度加入噪声(±10%),观察跟随车辆的横向速度的变化。仿真结果如图11所示。 图11 横向速度Fig.11 Lateral velocity 由图11可知,跟随车辆能很好延迟复现领航车辆横向速度,其他的轨迹误差都在合理的范围内,且很快衰减收敛,结果如图12所示。 图12 误差Fig.12 Error 近年来,中国基础设施建设如火如荼,对工程车及相关人员的需求极大,但工程车速低,工作过程缓慢且无聊,工作环境恶劣,因此本文针对特定需要,改善优化leader-follower模型,使之适用于工程车低速自动跟车系统,工程车的低速特性也极大降低了对系统的要求,且其工作环境较为单一,突发环境较少,因此建立相关模型较为容易。 参考相关文献误差系统,其误差系统不符合轨迹跟随需要,因此对其进行改进优化,然后设计控制器输出跟随车辆应有的纵向速度和横向速度,并结合车辆相关知识建立运动参数,对系统进行仿真模拟,得出参数基本符合要求。 辅助驾驶系统结构及相关原理发展较为成熟,其次就是工程车速度很慢,大多控制采用按钮和旋转机构,控制方式简单且易于进行控制指令转换,因此底层控制机构本文并没有涉及。
5.3 仿真模拟和结果分析





6 结语