压力分布监测袜的制备及其传感性能
2019-08-08李思明吴官正胡雨洁方镁淇贺录祥肖学良
李思明, 吴官正, 胡雨洁, 方镁淇, 贺录祥, 贺 燕, 肖学良
(生态纺织教育部重点实验室(江南大学), 江苏 无锡 214122)
近年来,随着电子技术、纺织技术和生命健康检测技术的飞速发展与日益交融,智能纺织品的设计、开发以及应用已经成为当前高端纺织技术研究的热点之一[1]。智能纺织品不仅具有对外界环境变化感知及对变化迅速响应的功能,还能保持纺织品原有柔软、易变性、舒适等特性[2],因而其应用给消费者带来全新的功能享受和穿着体验。
目前,用于人体健康监测的智能纺织品成功地将电子、光学器件和传感器微型化并嵌于织物或服装中[3-4]。此类纺织品可直接接触身体,增强佩戴者的舒适性和移动的便利性,减少传感器电子电路和能源之间的松散连接线。集成传感器的纺织品可以监测到多种变量,如心率、心电图、出汗率等[5]或生物医学方面的物理指标,如应力与应变等[6]。这些传感器大多数为织物结构中的集成微电子器件和导电聚合物或者是导电纤维纱线。与传统采用刚性材料制成的传感器不同,这种织物类传感器由于采用柔性纤维材料制成,具有柔韧性好,可自由弯曲甚至折叠的特性,具有更广泛的应用前景[7]。
对于足底压力检测,国内外已取得一定研究成果。金曼等[8]研制了基于聚偏氟乙烯压力薄膜的智能压力检测鞋垫,可揭示不同运动状态下足底压力的分布情况。Takahiro等[9]运用压力地毯对人行走时足底压力数据进行采集,并将足底的后跟、足弓区、脚掌区和脚趾区分为8个区域进行特征提取。但是,国内常规的纺织检测方法还无法准确地检测柔性成形类纺织品的应力变化和应力分布情况,成为亟待解决的难题。本文根据FZ/T 73031—2009《压力袜》要求,设计和制备压力监测袜[10],将具有导电功能的纱线集成于织物结构中形成压力传感模块,使得袜子具备一定的智能性,同时也满足力学性能的要求;利用自行搭建的压力测试平台,进行压力数据的采集;通过单片机技术和图像处理软件实现测试数据分析处理和可视化,直观地呈现应力-电阻的关系。本文测试平台结构简易,测试方法简单,具有良好的实用性。
1 织物柔性压力传感器制备
基于线圈嵌套结构的针织物具有良好的穿着舒适性及功能附加性,可搭载多种类型的传感器。本文制备的压力分布监测袜,其压力传感模块所用的纱线为18 tex导电纱,主要成分是含有质量分数为20%的不锈钢颗粒的粘胶纤维。通过扫描电子显微镜(SEM)得到导电纤维的表面形貌照片,如图1所示。纤维表面光滑呈锯齿状,导电成分均匀无团聚现象。实验测得该导电纤维的电阻约为24 Ω/cm。通过能量色散X射线光谱(EDX)得到导电纤维的主要成分,如图2所示。导电纤维的表面由C、O、Fe、Cr和Cl等元素组成,相对应的元素质量分数为47%、49.90%、2.41%、0.51%、0.18%,摩尔分数为55.20%、43.99%、0.61%、0.14%、0.07%。可见,C元素和Fe元素为主要成分。纤维中不锈钢颗粒与粘胶混合均匀,经过湿法纺丝后凝固的纤维与常规粘胶纤维的形貌类似。

图1 导电纤维束及单根纤维截面的SEM照片
Fig.1 SEM images of conductive filaments (a) and cross section of single conductive viscose fiber (b)

图2 导电纤维元素分析的EDX图
Fig.2 EDX image of elemental analysis of conductive fibers
利用上述掺杂不锈钢颗粒的导电粘胶纱与不导电的锦纶纱(18 tex),通过YB2-3030S型电脑横机(上海广立电器机械有限公司)一体成型(压力传感模块和导线均织入袜体面料内部,并与袜体不导电区域同时成型)制备压力分布监测袜,其中袜的主体和传感模块都采用相同的纬平针组织[11],密度为5~8线圈/cm。袜子的袜口区域采用1隔1罗纹组织结构,以增强袜子穿着的弹性,袜跟区域则采用双罗纹结构制备,以提高其耐磨性。根据脚底压力分布的特性,压力传感模块分为3个部分,如图3所示。压力袜的正反面中,白色区域是由导电粘胶纱线织成的一体成型的压力传感模块,其他区域为压力袜的主体。压力传感模块的组织结构如图4所示,正反面为纬平针组织。

图3 基于纬平针工艺一体成型的压力分布监测袜
Fig.3 One-piece pressure distribution monitoring socks based on weft stitch technology. (a) Obverse side; (b) Reverse side
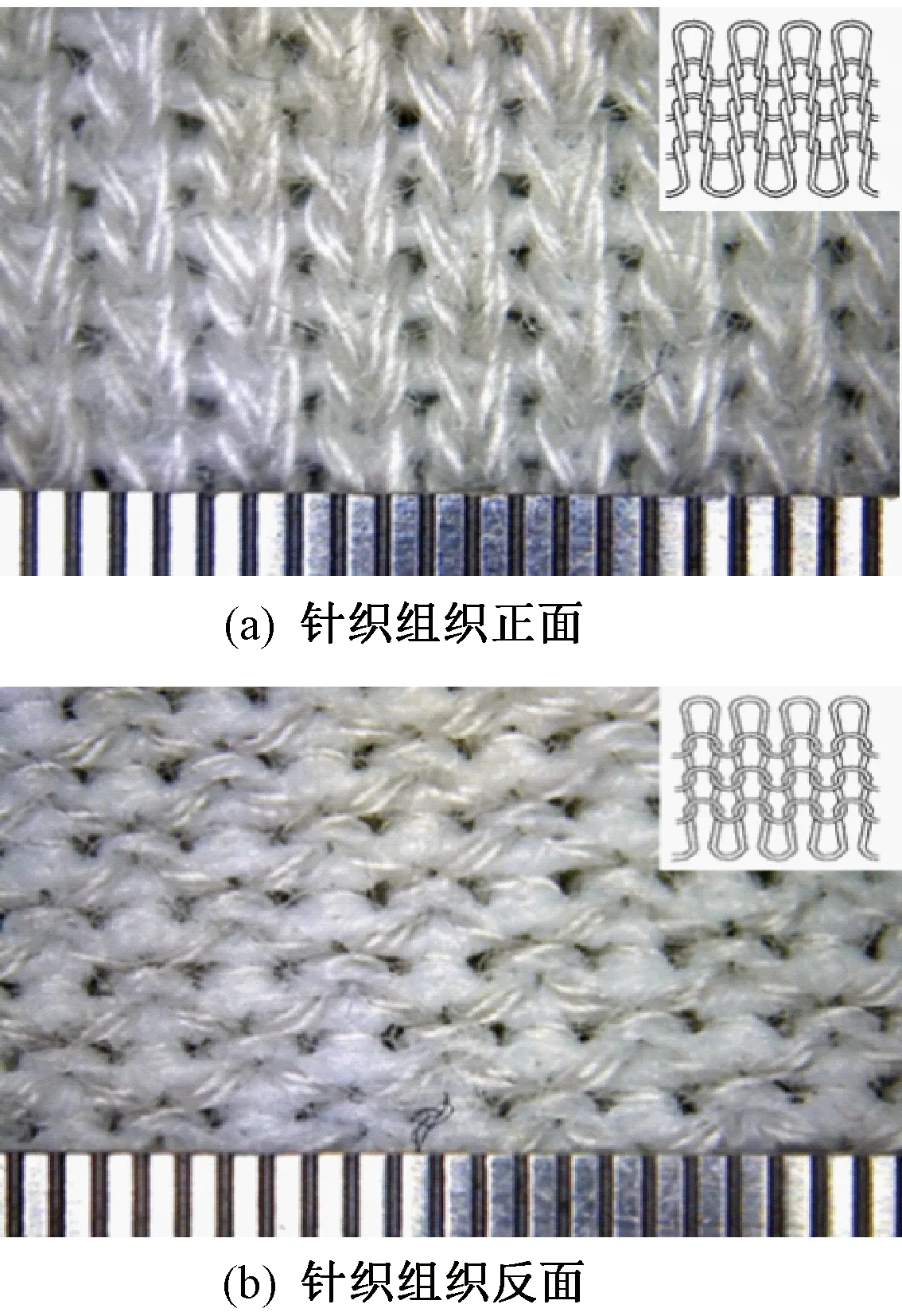
图4 针织柔性压力传感织物的组织结构
Fig.4 Weave structure of knitted flexible pressure sensing fabric. (a) Obverse side of knitted structure; (b) Reverse side of knitted structure
如图3(b)所示,由于要进行导电纱线线圈区域的电阻测量,所以将织物反面的粘胶导电纱的线头清理,以防止线头零乱导致短路,测试时夹持柔性传感器两端,用方阻仪测得其初始的面电阻,电阻值如表1中数据所示。实验数据显示,3个区域的面电阻不同,部位 2处的面电阻较小,说明此处的交织结构紧密,线圈密度较大。
表1 压力袜不同传感部位的初始面电阻
Tab.1 Initial surface resistance of differentpositions of pressure socks

测量部位面电阻/(MΩ·m-2)部位110.8部位22.5部位310.2
一般而言,压阻式传感器的电阻变化主要由以下几个因素引起:1)敏感元件几何结构的变化;2)半导体能带隙的变化;3)2种材料间接触电阻的变化;4)复合材料中粒子间距的变化。对于本文所设计的柔性压力传感器而言,其压阻变化主要源于“压”(增加的接触点)和“放”(降低的接触点)过程中不锈钢颗粒间接触点的变化以及导电纱线间接触面积的变化,如图5所示。因此,研究交织结构的压阻机制对于更好地应用该类交织结构压阻模型有重要的指导意义。

图5 交织结构压力传感器压力下电阻变化的机制
Fig.5 Mechanism of pressure change of intertexture pressure sensor under pressure
2 织物压力传感器的性能测试
传感器的特征参数众多,且不同类型的传感器,其特征参数的定义和要求各有差异。传感器的基本特征是指传感器输入输出关系的特性,对应本文中应力与电阻的变化特性,主要指标有灵敏度、迟滞性、稳定性及重复性等。
2.1 灵敏度测试
灵敏度是传感器重要的特性参数之一[12],是指温态时传感器的输出量y与输入量x之比,在此压阻性传感器中,定义灵敏度为S=△R·△P/R0。其中:△R表示随着压力△P的变化产生的电阻变化量,Ω;R0为初始电阻,Ω;灵敏度S即为曲线的斜率,kPa-1。
正如大多数已报道的柔性传感器[13-14],本文实验中,传感器的灵敏度在不同应力区域范围内大小不同。通过对压力袜3个传感部分测得的应力与电阻关系的数据可知:施加的应力不到10 kPa时,其灵敏度快速下降;应力在10~40 kPa时,灵敏度变化平缓;而当应力大于40 kPa时,灵敏度几乎不会发生变化。实验中用到的仪器为 ALJ-50HB型手动大行程拉力测试仪和VC890C+型胜利数字万能表。对于这3个部分,均在厚度方向上压缩,与此同时,万用表的测试笔与传感器两端连接,同步记录传感器的电阻值变化。
2.2 迟滞性测试
迟滞性是指在相同的条件下,传感器的正行程特征性与反行程特征性的不一致程度。传感器在动态负荷下其迟滞性是非常重要的,较大的迟滞性会导致传感器在动态负荷下产生不可逆的回复。通过文献可知,刚性纳米材料和高聚物之间界面黏附力相对较弱,在应变释放的过程中其纳米材料可以完全回复到初始位置[15],但对于柔性传感器,其正行程与反行程不一致程度明显增加。本文实验通过3次压缩-释放,分别研究3个传感部位的迟滞性。
2.3 稳定性与重复性测试
稳定性表示传感器在一个较长的时间内保持其性能参数的能力;重复性是指传感器在同一工作条件下,输入量按同一方向在全测量范围内连续变化多次所得特性曲线的不一致性[16]。本文测试选取位于部位2处的传感器。稳定性和重复性测试中,在厚度方向上施加不同的应力,同时使用测试软件记录电阻变化;在施加35 kPa应力下,重复200次对稳定性和重复性进行研究。
3 测试结果分析
3.1 灵敏度分析
图6分别示出位于部位1、部位 2和部位3处压力传感器的电阻值随着应力变化的关系曲线。其中:R0表示初始电阻;R表示不同应力下的传感部位电阻值,且随着应力的增加而减小;R/R0表示不同应力下电阻相对初始电阻的电阻比。图中的点代表实测电阻比值,实线为Origin拟合结果。在Origin拟合过程,使用Analysis中的Differentiate对所拟合的曲线上的点求斜率,即为该点的灵敏度。3个不同部位传感器在不同应力下的灵敏度如表2所示。
从图6可直观地看到,3个不同部位的柔性压力传感器的电阻值均随着应力的增加而减小,且减小的趋势相同,先快速下降后缓慢降低直到应力达40 kPa左右后减小到0。从表2也可看出:3个部位的柔性传感器的灵敏度随着应力的增加而减小,减小趋势如电阻与应力的关系趋势;且易得出,在相同的应力下,各个部位的灵敏度几乎相同。在传感器的选择上,应考虑2个方面,即灵敏度和实际需求。从数据结果可得出,在应力较小的情况下,传感器的灵敏度较好,但是灵敏度越高,越易受到外界的干扰,需要结合脚底所测部位的应力,选择合理的导电纱线与传感模块尺寸。
3.2 迟滞性分析
迟滞性是指在相同的条件下,传感器的正行程特征性与反行程特征性的不一致程度。图7分别示出压力袜中部位1、部位2和部位3处传感器的迟滞性曲线测试结果,折线越集中表示迟滞性越小。结合传感器电阻与应力关系可知,在应力大于40 kPa时,传感器的电阻几乎不会发生变化,所以迟滞性表现在应力为0~40 kPa之间。通过实验数据分析,部位1处传感器部位的压缩与释放间电阻变化率在0%~18%之间,部位2的在0%~14%之间,部位3的在0%~12%之间。对于实际应用中的柔性传感器而言,本文实验中传感器的迟滞性需要进一步控制。

图6 压力袜不同传感部位的应力与电阻关系
Fig.6 Relationship between stress and resistance of different positions of pressure socks. (a) Part 1; (b) Part 2; (c) Part 3
表2 不同部位传感器在不同应力下的灵敏度Tab.2 Sensitivity of different parts of sensorsunder different stresses

应力/kPa灵敏度/kPa-1部位1部位2部位30.00.1920.1980.1773.30.1190.1340.1246.60.0310.0430.0519.90.0190.0110.02113.20.0180.0060.00816.50.0090.0040.00333.00.0010.0010.00149.5000
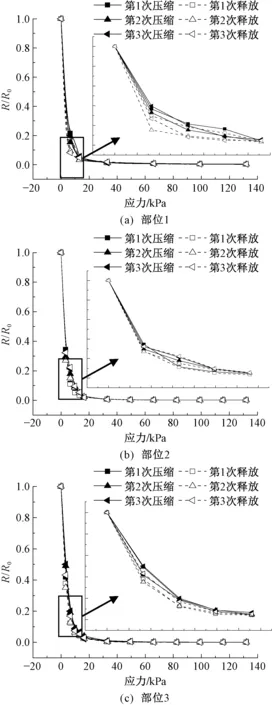
图7 压力袜中压力传感模块的迟滞性曲线
Fig.7 Hysteresis curve of pressure sensor module in pressure socks. (a) Part 1; (b) Part 2; (c) Part 3
3.3 稳定性与重复性分析
结合柔性传感器的灵敏度和迟滞性测得的结果,选择部位2处压力传感模块进行稳定性与重复性的实验,测试结果如图8所示。可以看出:在不同的应力(5、10、20、40 kPa)下交织结构类型的传感模块具有良好的稳定性;在应力为35 kPa下进行200次重复实验,从图8(b)中压缩前后曲线变化可知,其电阻值的比值没有明显的波动,重复性较好,可满足作为压力传感器对稳定性和重复性的要求。

图8 压力袜中部位2处传感部位的性能测试结果
Fig.8 Performance test results of part 2 sensing part in pressure socks. (a) Resistance curves under different stresses; (b) Repeatability curve chart
4 脚底压力分布与试穿效果测试
本文所制备的压力袜的3个部位的传感器模块,分别对应于人脚足眼、第1跖骨和第5跖骨的位置。通过王明鑫等[17]的研究可知,静态情况下足底压力分布具有差异性,如表3数据所示。3个部位静态瞬间压力都在40 kPa以下,符合所制作的柔性传感器量程,可进行足底压力的常规测试和使用。
表3 静态足底各部位瞬间压力
Tab.3 Instantaneous pressure at various partsof static feet

脚底位置压力/kPa足眼第1跖骨第5跖骨左脚112923右脚153422
为进一步研究压力袜传感器部位的实用性,将压力袜穿在脚上行走,同时通过测试软件记录电阻值的变化,结果如图9所示。其中:行走频率为0.5 Hz;ΔR=R0-R;ΔR/R0表示电阻变化比。从实验数据可看出,当脚接触地面到远离地面的过程中,3个传感器部位电阻发生明显的变化,不同部位由于应力不同表现的电阻变化比值不同。实验结果表明:本文实验测试的压力袜不同部位传感器可精确地测量脚底应力的变化,在运动和医疗康复等方面具有良好的应用价值。

图9 压力分布监测袜中压力传感模块的 行走电阻变化图
Fig.9 Pressure distribution monitoring change chart of walking resistance of pressure sensor module in socks. (a) Part 1; (b) Part 2; (c) Part 3
5 结 论
本文将导电纱线集成到织物结构中,设计制备了一体成型压力分布监测袜,通过对不同导电柔性压力传感模块进行压缩实验,研究其应力与电阻的关系。实验结果表明,所织造的压力袜的应力与电阻呈反比例关系,在其他条件相同时,传感器的电阻值和灵敏度随着压力的增加而降低直至不变。在应力为40 kPa之内,各部位的传感器具有良好的灵敏度。所织造的压力袜在不同应力下均展现出良好的稳定性与重复性,满足了柔性传感器的要求。脚底压力分布与试穿效果表明,使用含有质量分数为20%的不锈钢颗粒的粘胶纤维纺成的纱线,织造的针织柔性压力传感器在运动和康复等方面具有良好的应用价值。
