无人机倾斜摄影支持下的1∶500高精度三维测图方案及应用
2019-08-07赵小阳孙松梅
赵小阳,孙松梅
(1. 广州市城市规划勘测设计研究院,广东 广州 510060; 2. 广州智迅诚地理信息科技有限公司,广东 广州 510000)
作为国家基本比例尺地图中精度和地形地物要求最高的地图成果,1∶500地形图的应用范围越来越广泛。在城市规划、国土资源管理、拆迁、建设和地籍调查等项目中,都需要测绘1∶500地形图。近几年全国集中组织开展的一些与测绘地理信息相关的项目,都明确要求生产出1∶500地形图,如不动产确权登记、高标准农田、美丽乡村建设等。
传统方法测绘1∶500地形图,主要利用RTK和全站仪实地采集特征点、地物点的三维坐标,再用软件编绘地形图。传统1∶500地形图测量采集要素多、精度要求高,需要投入大量测工实地采点、调绘,需要较高的时间和资金成本。近年来航空摄影测量的发展,使得采用固定翼无人机搭载单镜头相机或多旋翼无人机搭载五镜头相机摄影测量的技术已较为成熟,并在1∶2000及以下比例尺的测图项目中广泛应用[1-4]。随着飞控软件、续航时间、定位精度、载重量等无人机参数的优化提升,无人机摄影测图效率逐步提高,需要用到的外业测绘人员大幅减少,无人机已基本取代传统人工测绘,成为大面积测图的主流方式[5-9]。但传统航测一直没有突破5 cm点位中误差要求,这就限制了无人机在高精度测图项目中的应用。因此,研发一种适应于大范围1∶500的无人机测图方案迫在眉睫。本文以哈瓦四轴八旋翼折叠双电版无人机MEGA-V8Ⅲ为平台,加载五相机三维立体倾斜测量系统,经检验所测1∶500地形图满足测量规范要求。
1 总体技术路线
倾斜摄影技术是国际测绘领域近些年发展起来的一项高新技术,基于摄影测量技术,通过在同一飞行平台上搭载多台传感器(目前常用五镜头相机),同时从垂直、倾斜等不同角度采集影像,获取地面物体更为完整准确的信息。
以倾斜摄影技术获取的影像数据为主要素材,将结合其他技术手段获得的现状影像照片或扫描点云数据,经多视影像空中三角测量、多视影像密集匹配、数字表面模型生成、三维空间网格模型生成、纹理映射、真正射影像纠正等过程进行自动化加工处理后,对自然环境中的地形地貌、地物设施等场景实况三维模型构建的过程,即无需人工干预,从多源数据中获取连续影像,从而生成真三维模型的过程,称之为自动化实景三维建模,通过自动化实景三维建模所获得的真三维模型,称为实景三维模型。
实景三维建模具备高效率、高精度、高真实感、低成本的优势,由其得到的实景三维模型可以用来直接测量坐标、采集成图,实现裸眼三维测图。由于实景三维模型能多角度查看地物,在正射影像中无法修正而需要到现场调绘的屋檐、飘楼、阳台等细节信息,都可以直接在三维场景下采集、标注,这大大减少了外业调绘的工作量,在室内就能完成采点和制图工作。
2 关键技术
倾斜摄影全作业流程中的主要误差来源有数据源采集误差和处理误差,具体包括原始数据(相片)采集误差、解算误差和三维测图软件的采点误差。本文提出了针对无人机航摄过程中各个精度影响因素的解决办法,定制了采集高精度原始影像的无人机航摄系统,并革新了内业测图方式。
2.1 集成RTK模块的多旋翼无人机平台设计
2.1.1 机身稳定设计
本文采用的平台是哈瓦四轴八旋翼折叠双电版无人机MEGA-V8Ⅲ,哈瓦无人机机身采用的碳纤维一体化设计增加了机身整体强度,减少了震动,降低了外界信号的干扰问题,提高了机体的安全性和可靠性。挂载设备下沉式设计使飞行器的相对重心下沉,有利于飞行器的稳定性,姿态控制更为简单,从而提高飞行器的适航能力。上下正反桨共轴设计结合为双冗余控制系统,为飞行平台提供充沛的动力,极好的机动性能,适应复杂飞行情况,与同等机型对比,动力响应更快、抗风能力更强、飞行姿态更稳定、整体性能更优异。
2.1.2 相机拍摄时间与POS定位时间的同步
利用无人机航测实施1∶2000及以下大比例尺测图时,容错范围较大,即使飞机的时间、位置与相机拍照的时间、位置不统一,对航测造成的影响也在误差允许的范围内。而当比例尺变成1∶500,特别是在不动产确权登记项目中,容错误差变成了界址点的点位中误差(5 cm以内),这时POS定位时间相对于相机拍摄时间的延迟对整个测图系统的影响变大。本文研究通过相机热靴传递脉冲信号,实现相机-GNSS接收机毫秒级同步,触发接收机内部核心模块对原始数据的采样,并进行定位、定向和速度的高精度解算。其优点如下:①由相机快门释放时刻产生的信号触发接收机,最大限度地减少了机械延时产生的误差;②由外部事件控制接收机原始数据的采样,而不是根据触发时刻和前后坐标等信息进行插值计算,保证了高动态场景下的测量精度。
2.1.3 机载RTK模块的高精度无人机航摄定位
无人机在空中飞行的姿态与飞机的稳定性和定位系统有很大的关系。目前大多数无人机只搭载了磁罗盘和GPS的单点定位系统,这导致无人机在空中的姿态数据,即POS点误差非常大,尤其是在比例尺为1∶500时,可能直接造成三维模型的波浪式起伏,或局部的隆起、下沉等,从而导致1∶500地形图的超限超规。
本文项目的哈瓦无人机为飞行控制系统开发了高精度导航定位系统,采用双RTK设计,天线间距约1 m,能够接收三星(北斗、GPS、GLONASS)7个频段数据,通过实时动态差分技术将三维定位精度由米级提升至厘米级,集成了定位、定高和测向功能,可实现高精度飞行。传统无人机定高采用的气压计极易受载体气动布局和气流波动影响,在启动、刹车或长距离、长时间飞行时可能出现严重的高度误差。而RTK提供的可靠的厘米级高度信息,能够输出精准的航向信息;提供的强大的抗磁干扰能力,在高压线、金属建筑等强磁干扰的环境下保障飞行的可靠性。高精度的双RTK多传感器结合灵活充沛的动力系统和飞控算法,保证了定制无人机在飞行过程中的高精度飞行,即使在有风情况下也能对姿态进行实时矫正,采用FOC反馈电调实时反馈动力系统运转状态,有效提升动力系统效率和控制灵敏度约10%,航线轨迹可高精度重复,航线精度误差为2 cm,定向精度为0.2°,3~4级风情况下掉高不超过0.5 m(如图1所示)。
2.1.4 自主减震系统设计
本文从无人机与航摄系统一体化减震设计角度包括机型结构设计独特,碳纤维一体成型机身的仿生设计,4个电机座相互平行出发,通过机身结构降低振动频率及振幅,从而使得电机震动最小的传导到机身中心点。另外,本文还设计了无人机与挂载之间的减震系统,通过独特的风洞设计,使得无人机在空中飞行过程中,减少电机及空气气流等因素对机身的震动影响(如图2所示)。
2.1.5 优化了五镜头相机的结构和参数
倾斜摄影1∶500高精度三维测图技术定制了数据采集系统,即无人机搭载的五相机,通过大量采集实践,调整了五相机的焦距、光圈、镜头等参数,大大降低了采集误差。五镜头倾斜相机采用高品质相机搭配带有ED镜片的高端T*镜头,针对航测特性及需求进行了系统化的改装,5个相机严格要求时码同步、帧同步,合焦点相同,因此对相机的调校要求极高。飞控给出拍摄指令,相机执行快门到1/2处时,飞控同时记录RTK POS点,两个时间点完全一致。另外,相机通过挂载端的减震处理,保证了无人机在飞行过程中的振动不被传导到相机,将振动与相机进行物理隔离。同时,根据飞行速度等因素,测定了飞行的前倾角度,在云台挂载端进行了相应角度的修正,保证在作业过程中正摄镜头与地面呈90°。
2.2 严密的高精度像控布设与空三解算
利用航测方式实现1∶500测图,必须引入高精度的像控点参与空三解算。就某一测区而言,理论上高精度的像控点越多越能清晰地描述该地区,但考虑实际的作业效率和经济负担,像控点并非越多越好,而是应有合理的分布和合理的数量,才能平差得出符合实际的三维模型。本文根据实际测区情况和空三平差原理,设计出合理数量和均匀分布的像控点,结合POS系统提供的外方位元素和相机安装位置关系,辅助控制点强连接几何条件,GPS+IMU实现多视角影像自检校区域网平差迭代计算,从而平差得到了精度达到2 cm以内的三维模型,满足了确权所需要的界址点点位中误差的要求。
2.3 多视角组合采集的全新测图模式
本文将传统航测的双目立体视觉方法,扩展到以机器视觉多视图匹配,大幅提升交会精度。自动检索多拍摄角度影像,结合倾斜摄影同名点匹配技术,提出了模型与影像结合的矢量采集新模式,相比传统航测采集,无需佩戴立体眼镜,即可在倾斜影像上实现屋檐和阳台的改正,大幅降低外业工作强度(如图3所示)。
针对场景中的遮挡问题,本文创新性地提出辅助线方法,通过点-线联合解算改善几何条件,设计了采集-验证模式,可对多种地形模式和地物部件进行内业全要素采集,并为质检提供了一套有效的工具系统。
2.4 快速海量影像处理的协同生产体系
本文通过生产协同处理框架,实现对空三、自动建模、测图、质检等工具软件的任务和版本管理。通过后台数据库管理平台和分布式文件存储技术,解决了数据文件多、种类杂、分布散的问题,并使用负载均衡等技术,实现中间数据高效流转,达到了软件间的互联互通。基于渐进网格化存储模型的影像数据存储模型设计、多点透视索引算法和CPU-GPU协同并行处理提升作业单位整体生产效能。利用FastFDS分布式文件系统进行一致性哈希改造,搭建高可用分布式影像存储和检索框架CFDS,哈希结果尽可能地平均分散到各个节点上,使得每个节点都能得到充分利用。确保在出现节点故障时,系统能够自动识别故障节点,自动恢复故障节点涉及的数据和元数据,使得单节点的故障不会影响到系统整体的对外服务,完全不影响业务的连续性。在数据生产过程中,形成规范化的工作流程管理及各生产过程中数据共享和处理环节的并行优化。
3 成果应用案例
3.1 项目背景和技术路线
广州市白云区马沥村是原国土资源部农村不动产权籍调查的示范点,项目需要测绘高精度的1∶500地籍地形图,测区面积1.5 km2,地势相对平坦,地面要素主要为村庄居民地、耕地。倾斜摄影1∶500高精度三维测图技术的技术路线为:倾斜摄影数据采集、数据处理、实景三维建模、三维测图、精度检核及成果提交。
3.2 航飞路线设计
测区范围内最高地物为电塔,约为65~70 m,实际飞行高度为102 m,航飞地面分辨率为2 cm,飞行时间共计2 d 13个架次,影像旋偏角控制在6°范围内,航向重叠与旁向重叠率控制在70%以上(如图4所示)。
3.3 像片控制测量和建模
像控采用先整体再局部,由长边控制短边的方式布设。测区总共布设了28个像控点,其中3个静态点由国家二等控制点引入,另外25个点采用RTK 1+1模式加密布设而成,像控点间呈等边三角形分布。
本次空三和建模软件采用ContextCapture实景三维建模软件。坐标系为CGCS2000,中央子午线为东经114°,无人机POS为精确WGS-84坐标。平差时使用23个控制点,另外5个控制点作为检测点使用,像控点检测成果见表1。
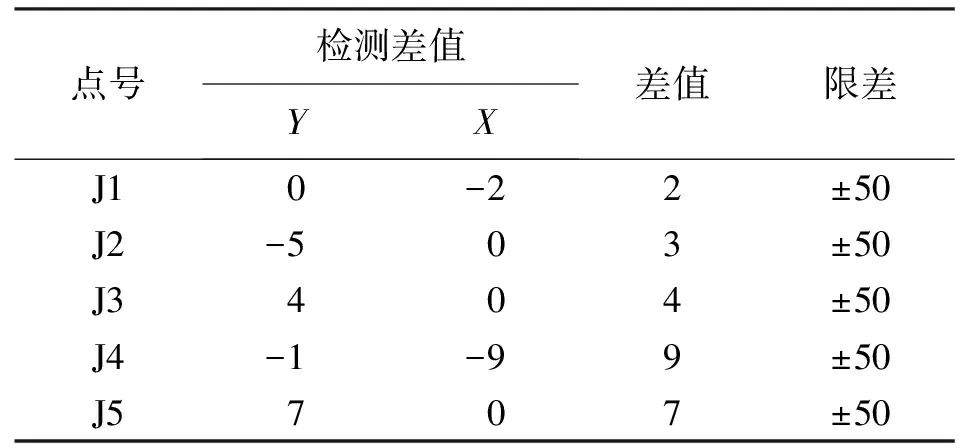
表1 像控点坐标检查统计 mm
3.4 室内测图
项目室内测图采用DP-Modeler软件,实现利用倾斜摄影技术获取的影像数据进行高精度的大比例尺地形数据的矢量采集工作。作业人员无需佩戴立体眼镜,根据模型和影像所见即所得的定位地物要素的三维信息,采集同时赋予要素的国标编码,矢量成果可导出多种数据格式(如图5所示)。DP-Modeler软件能实现屋檐纠正,大大减少外业调绘工作量。本文研究表明,采用无人机方法测1∶500地形图比传统地形图测量方法减少约2/3的时间和人力成本。
3.5 成果质量检验
本文1∶500地籍地形图成果采用传统全站仪进行外业采点进行成果自检,地物点点位中误差为2.71 cm,具体结果见表2。经省级测绘地理信息产品质量检验站进行第三方质检,抽样5幅1∶500地籍地形图,检验结果表明数据及格式正确,要素分层合理,地理要素采集方法正确,综合取舍较为合理,数学精度符合设计要求(见表3)。
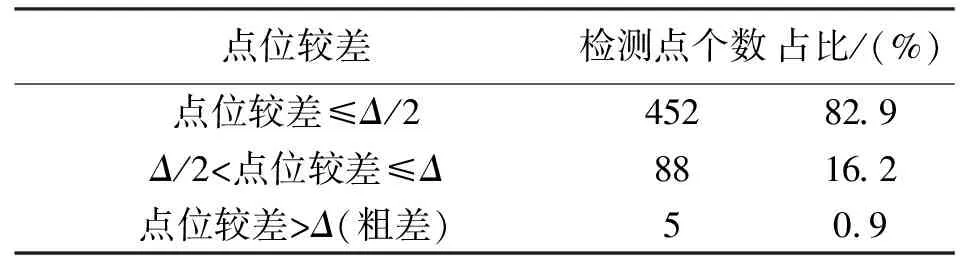
表2 平面坐标的精度统计
注:Δ=10 cm,地物点点位中误差σ=2.71 cm
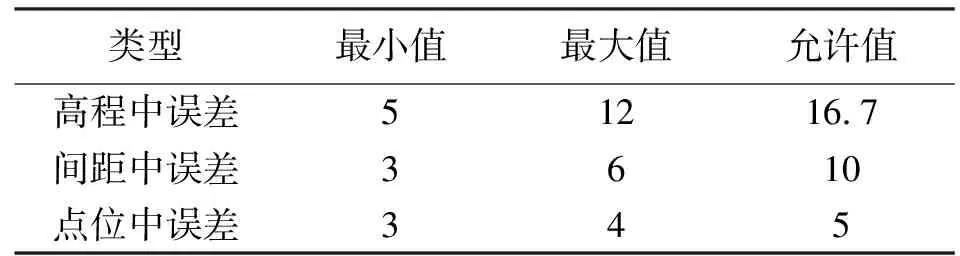
表3 第三方质检数学精度统计 cm
4 结 语
本文的无人机倾斜摄影系统搭载了高精度的定位设备,再结合地面控制点,成果平面和高程中误差均可控制在5 cm以内,达到了1∶500地形地籍测量的精度要求。实景三维建模是在航拍影像的基础上,通过计算机自动构建还原真实世界的完整面貌,实现了全要素覆盖的三维建模,并大大缩短了外业采集的时间,显著提升了综合作业效率。另外,本文在采集地形图成果的同时,还能得到DOM、TDOM、DEM、DSM、实景三维模型等测绘成果,采集生产的数据可用性大大增强,提升了项目的附加值和生产单位的竞争力。