多用途工业机器人教学平台研究
2019-08-06董超祥
董超祥
摘 要:机器人在搬运、焊接、装配以及机械加工等领域取得广泛的应用,但在教育领域,机器人教学主要集中在机器人本体及其控制器的认知式教学,课程内容主要集中在机器人工作原理等理论知识,关于机器人工业应用的实践教学比较片面,内容仅局限在机器人搬运、码垛、焊接等某一个具体的应用模块上。文章针对此类问题进行分析,并探索如何在职业院校更好地开展工业机器人多用途应用模块的集成技术,为社会培养所需的工业机器人核心人才。
关键词:工业机器人;多用途;探索;应用模块;集成技术
《中国制造2025》提出“创新驱动、质量为先、绿色发展、结构优化、人才为本”的发展方针,工业机器人是《中国制造2025》的十大重点领域之一,是实现当前制造升级的核心工具。随着工业机器人的广泛应用,专业应用人才短缺,因此,开展工业机器人职业教育迫在眉睫。目前,在工业机器人教学应用的实践中,仍然需要组织学生到对应的企业进行生产实训实习,如机器人焊接工艺一般去汽车厂车身焊接车间、机器人打磨工艺通常去卫浴产品生产企业、机器人装配工艺通常去富士康之类的3C组装企业进行生产型实践实习。这种传统的实践学习方式既费时又费力,同时,局限于企业本身的生产任务,以致学生无法系统性地学习机器人应用。
另外,职业院校开设工业机器人专业时,往往借助第三方的市场分析调研报告,或者组织相应的专家评审的结果,关键是很多学校还不具备将工業机器人进行教学转换的能力,造成学校所建设的专业多偏重于理论,或者局限于单一功能的知识点,无法与典型的工业应用结合起来进行实训,无法从根本上解决学以致用的问题,导致学生在就业时出现与企业人才需求不匹配的情况。
1 机器人教学常见问题分析
1.1 工业机器人实训教学设备数量多而功能不全
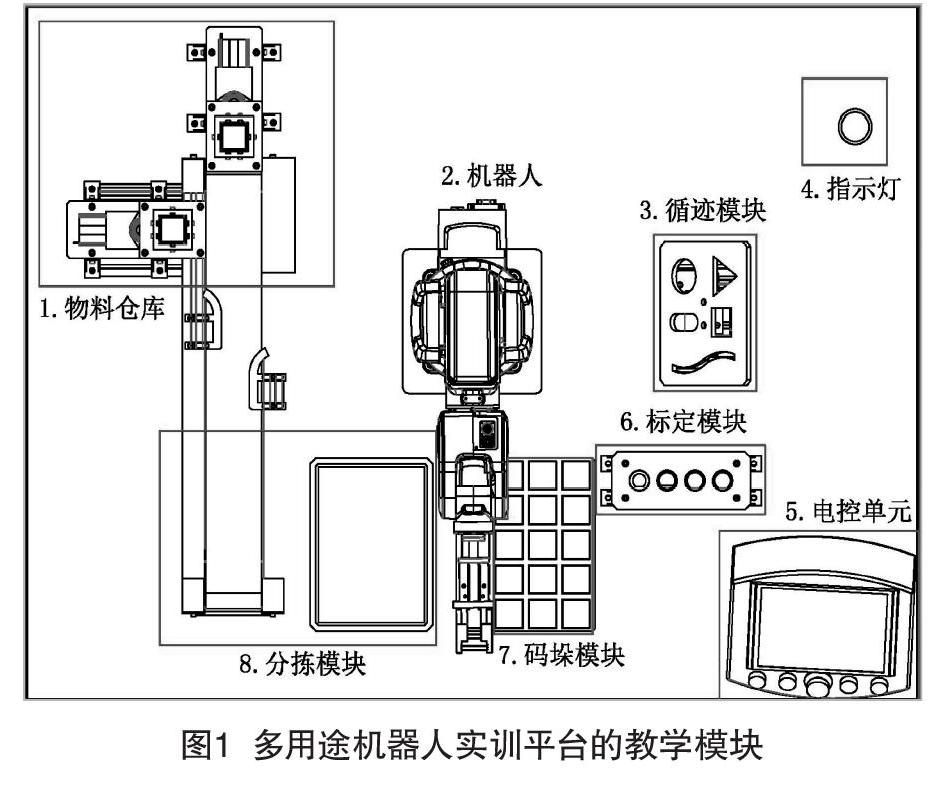
无论是针对工业机器人结构组成的装拆机器人工作站,还是写字机器人工作站、码垛机器人工作站,都只强调机器人的单一功能或应用[1],而本平台可以实现多种工业应用(见图1)。
1.2 校企之间的人才培养与需求的对接问题
目前,机器人教学活动偏重于机器人的基本组成、工作原理等理论知识,而企业需要能进行自主编程、调试及维修保养的人员,因此,理论与实际的结合需要有效的教学平台来实现。
1.3 师生教学与实训过程中实际操作与创新能力欠缺
功能模块采用可拆卸的组装方式(见图2)。同时,电控单元采用通用的可编程逻辑控制器(Programmable Logic Controller,PLC)模块,师生可以按照自定义的方式搭建新的功能模块,设置新的控制方式。
2 多用途工业机器人实训平台介绍
2.1 多用途工业机器人实训平台的组成
实训平台是由机器人工作台、码垛平台、写字模块、微型流水线、立式料架与送料机构、机器人本体(含控制器)、工作状态警示灯、自动工装、电控模块及其他外围设备(如激光发射器、气源等)组成。
2.2 实训平台的工作方式
2.2.1 手动操作方式
开启电源及气源,通过机器人示教器进行手动操作,完成坐标标定、平面轨迹、写字及码垛等教学实训操作;操作过程可以随时中断,可选择从头开始或继续运行。
2.2.2 现场编程方式
利用PLC与机器人控制器通信,控制机器人的标定、码垛及写字功能等,另外,通过可编程逻辑控制器直接控制真空压缩机、流水线、警示灯等设备,协同进行教学实训操作[2]。
以PLC(以西门子S7-200 smart为例)作为上位机,控制机器人控制器、气源、皮带流水线、警示灯、按钮及其他扩展应用[3]。机器人控制器作为下位机,控制机器人手臂及手部工具的动作,局部网络采用交换机进行连接(见图3)。
PLC与触摸屏或电脑连接,完成控制过程的可视化,具体过程如下:开启电源后,从PLC发出指令,气源开启,送料机构动作,将工件送至微型流水线。当工件运输至适当位置时,光电开关检测到对应的工件,将相应的信号发送给PLC,PLC回传停止指令,流水线停止运行,同时PLC发出指令给机器人控制器,接着,机器人控制器通电开机,并且触发与控制器连接的示教器,调用预存的机器人动作指令,然后机器人选择对应的手部工具,机器人手臂移动至流水线上方,手部工具通过气源张开,机器人末端移动至工件处,抓取工件,手部工具吸合,搬运至堆垛平台,重复抓取工件,按设计方式堆垛,反馈信号给PLC,调用下一段程序,继续另一道工序。另外,PLC与警示灯连接,当系统正常工作时,警示灯显示为绿灯;当停止状态时,显示为红灯;当维修状态时,则显示为黄灯。
2.2.3 离线编程的方式
例如,当机器人选用ABB IRB120时,就可以采用ABB的离线编程软件RobotStudio,在计算机上模拟机器人的运行过程,然后导入控制器中,按照程序控制机器人自动运行。
3 多用途工业机器人教学平台的核心优势
3.1 系统涵盖机器人教学模块全面
可进行机器人基础操作,6轴校正、点运动、线性运动等,机器人运动范围、载荷选型、各种典型的坐标系及坐标系转化。机器人进阶操作,坐标标定、轨迹规划、流水线控制、上料结构控制、搬运码垛以及PLC与控制器的组网通信等。
3.2 系统结构可拆装
机器人工作台选用带滑槽的铝型材结构,各模块用可移动螺母固定在桌面上,可任意拆装并移动其安装位置,提高学生的动手能力并理解机器人工作范围的意义,重点是学习工业应用中如何对机器人应用进行系统的布局设计。
3.3 可视化控制
系统采用触摸屏或电脑的显示方式,所有的通信模块均可采用PLC编程方式实现,通过触摸屏的各种功能单元实现一键式操作,如选择坐标标定,就可以完成机器人标定的所有功能(见图4)。
4 结语
搭建多用途工业机器人教学平台,可以促进教学的内容与科研改革。(1)实现工业机器人实训教学的一体化,软硬件兼容,理论与实践相辅相成。(2)系统可扩展性,功能模块可自由变换,并按实际教学要求进行增减,尤其是可结合机器人的实际应用,教师或学生可自行开发出多种应用模块,实现学生实训与就业的无缝对接。(3)校内工厂,结合特定产品,可改造成生产设备,完成部分工序的加工,多台实训设备可组建柔性生产线。
[参考文献]
[1]叶辉,管小倩.工业机器人实操与应用技巧[M].北京:机械工业出版社,2011.
[2]付强,潘春鹏.“工业机器人技术及应用”课程教学改革探讨与实践[J].教育现代化,2018(43):90-91.
[3]白雁力,卢健,李姮,等.“双创”和“新工科”背景下协作工业机器人专业类实训项目设计与实现[J].教育教学论坛,2019(15):40-41.
