鸭式—飞翼布局无人机设计研究
2019-08-06李勇霖张纯良吕羿良林涌鑫李江宇谢宜师
李勇霖,张纯良,吕羿良,林涌鑫,李江宇,谢宜师
(北京理工大学珠海学院,广东 珠海 519000)
目前无人机主要由固定翼无人机与旋翼无人机两大类构成。固定翼无人机以常规气动布局居多,但也有鸭式布局、三角翼布局、飞翼布局等。旋翼无人机则以多旋翼无人机居多,但也有无人直升机与倾转旋翼机等。它们所具有的优点显而易见,但其表现出的不足也一样突出。为此,本文提出了鸭式-飞翼气动布局无人机,针对目前固定翼及多旋翼无人机的不足,在载重能力、续航时间、飞行速度及安全性上作出了改善。
1 设计思路及方法
飞翼气动布局具有阻力小、飞行效率高、结构简单、重量轻以及较低的可探测性的优点。但依旧存在着航向稳定性差、俯仰操作性差、较小的最大升力系数CLmax 及较高的飞行速度等不足。而鸭式气动布局则有着着较大的俯仰操作范围、较大的失速可控范围、较小的配平阻力以及在大迎角飞行及平飞时提供更大的升力。同时也具有结构复杂及较高的飞行速度等不足。为改善飞翼布局与鸭式布局的高航速及载重性,我们将鸭翼与飞翼进行融合,大程度地发挥各自的优势。
本文采用雷诺N-S 方程:

作为基础方程,用3D-Panel 对飞行器在流场中的气动特性进行计算,并以XLFR-5 软件进行辅助。其中3D-Panel是对涡格法(VLM)与升力线法(LLT)的结果进行细化。再利用Re=ρvL/μ 对飞行所需雷诺数进行初步计算。其中ρ为流体密度,μ 为动力黏性系数,v 为流场的特征速度,L特征长度。该款无人飞行器为低空低速飞行器,最大飞行速度为25m/s,最大升限为1000m。在此飞行速度及飞行高度的区间内,我们将大气视为理想流体进行计算。飞行阻力则着重考虑诱导阻力、干扰阻力及黏性阻力。
2 无人机性能参数的确定
目前国内外小型无人机市场中,多旋翼无人机的巡行速度为6 ~8m/s,续航时间为21min,实际飞行半径为300m。外挂载重约为200g。固定翼小型无人机的翼展为1200mm,最大飞行速度约80km/h,起飞重量约为1kg,理论飞行时间为45min。本文所设计的鸭式-飞翼气动布局无人机,翼展为1200mm,机长约为600mm。最小飞行速度4m/s,巡航速度15m/s,理论升限3000m。其最大起飞重量3kg,有效载荷1.7kg,转场半径10km,最小转弯半径1.5m。
3 飞行器几何参数的选取
(1)鸭翼的设计。鸭翼对主翼的影响主要表现在其脱体气流在主翼上方所产生的低压区来扩大主翼的压差,在大迎角飞行时鸭翼的上洗气流可有效减小主翼迎角,以达到扩大失速范围的目的。高速战机的鸭翼为大后掠角、大展弦比与较小的相对厚度。但在低速小飞机中,此设计方案将不再适用。
低速飞机鸭翼气动结果如图1 所示。从CL图中我们不难看出,当鸭翼后掠角逐渐增大的同时,整机升力系数出现下降,鸭翼气动特性与高速飞机恰好相反。通过对无人机其他气动特性的分析发现,在低速状态下,鸭翼对主翼的作用主要为翼尖涡流,并非高速飞机的脱体涡流。如图2 所示,从不同后掠角的诱导阻力系数ICD与迎角的曲线,结合公式CD=CL2/πAe,印证上述结果。

图1 整机升力系数与迎角的变化图
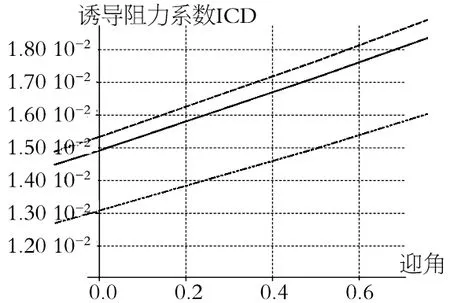
图2 诱导阻力系数ICD 与迎角的变化图
(2)飞机翼稍弦长的选取。其中在外翼弦长的设计中,当增加外翼弦长可获得较高的升阻比,但其纵向稳定性或配平阻力将显著增加。展弦比的减小将使气动效率进一步降低,使得翼载荷提高而增加结构重量。同时考虑到存放空间问题,外段机翼在必要时需要向内进行折叠,以减小机体体积,方便人员携带。所以在设计时,我们选择尽可能小的外翼弦长。
(3)飞翼前缘拐点的设计。前缘拐点是由外段翼与内段翼不同的后掠角而形成的,其是对低速特性影响最大的几何参数。拐点位置受任务载荷被约束。在同样的任务载荷下,要获得较小内翼相对厚度,拐点则需向翼尖移动,因此,升阻比及纵向静稳定性会得到增加,但同时,其重心位置将向后移动。同时在拐点前缘处会出现较大的应力集中点,将影响整机的结构强度。为克服应力集中点的出现,机体结构重量也将出现增加。
(4)主翼前缘后掠角的选取。本文采用前缘双后掠形式设计,如图3 所示,后缘外轮廓成M 型。为提高载重能力与机体空间,减小飞行阻力、翼载荷及机体大小,避免飞行时的应力集中。内段机翼与外段机翼都采用较小的前缘后掠角,增大机翼面积,降低翼面载荷。同时为能适应低速飞行及重心配置,内段前缘后掠角为32°,外段前缘后掠角为12°。
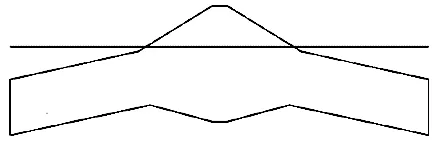
图3 几何形状设计及重心参考
(5)翼型的选择及优化。通过对几何参数的选择,将翼型初步确定为内段机翼平凸翼型,外段机翼凹凸翼型,翼面积定为3600cm2。通过L=v2SρCL/2 可估算得出升力系数CL=0.8。利用profili 翼型软件对已有翼型做初步筛选,选择 如C72、BRUXEL33、CLARK K、CLARK X、CRTISS72 等10种符合内段与外段设计要求的翼型,并将其全部导入XFLR5软件中进行分析,如图4。为防止翼尖与鸭翼先失速的问题发生,利用XFLR5 对选定翼型C72、RAF 32 DOM、NACA 6412 翼型进行改进,对内段翼型C72 的相对厚度进行增加,缩小其相对弯度,在满足空间需求的同时,仍提供部分升力。外段机翼则减小其相对厚度,增加相对弯度,后延其失速迎角,确保其有着较大的可控范围。鸭翼翼型NACA 6412 尤为重要,需满足在正负迎角下的配平力矩。
(6)鸭翼与飞翼相对位置的选取。为使鸭翼对主翼的气动影响达到最佳,本文所采用的方法为增加鸭翼上反角,该方法将避免了鸭翼乱流对主翼的无利影响,同时使鸭翼翼尖涡流、上洗及下洗气流处于有利位置,如图5 所示。
(7)约束条件的设定。在几何形状设计时同时,要考虑部件几何约束,如动力总程、飞行控制器及任务载荷等容积需要。这将直接决定内段翼型的厚度、弦长及弯度。在选取弦长较小的翼型时,其厚度不能过小,弦长不能过短,弯度不能多大。
4 整机外形优化结果分析
通过前文所述的设计步骤,进行多轮的设计优化迭代,最终获得了较为符合设计要求的气动外形模型,如图6 所示。
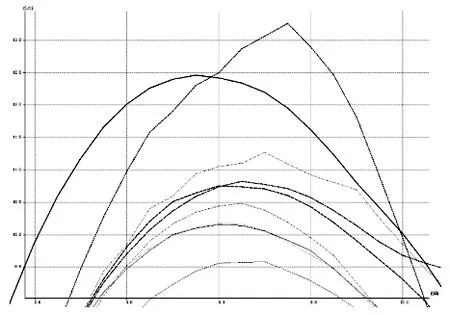
图4 10 种翼型的升阻比曲线
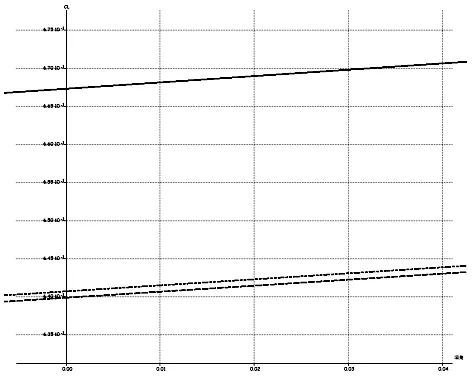
图5 不同鸭翼形状下整机升力曲线
优化设计后的参数具体如下,翼面积3643.4cm2、平均气动弦长262.53mm、展弦比7、前缘后掠角33°与13.6°,展向相对厚度排布为22%、17%、14%、10%;鸭翼翼展为440mm、翼面积660cm2、后掠角4.42°、上反角7°。对该款无人机的设计中发现,主翼处于鸭翼干涉的前提下,鸭翼的翼面积、上反角、后掠角、x 轴方向的距离、y 轴方向的距离与对全机升力系数及升阻比间存在相应关联。当鸭翼翼面、x 轴轴向距离、y 轴轴向距离与后掠角不改变,增加上反角使整机升力系数斜率将等比例增大,但升阻比将降低,升力曲线上移。若引入翼面积作为变量,升力系数曲线会短暂上移,之后将会有剧烈下降。当鸭翼的翼面积与上反角一定时,主翼处于鸭翼的干涉前提下。x 轴轴向距离与升力系数大致程平方关系,z 轴轴向与x 轴轴方向类似。可用公式cL=-kx2+en的形式,其中k 为变化系数,en为修正系数。
5 结语
(1)鸭式-飞翼气动布局无人机在优化设计后,升力性能明显提高。相较于单飞翼布局或单鸭翼气动布局的升力提高13.3%,同时其有效载荷提高为8.6%。
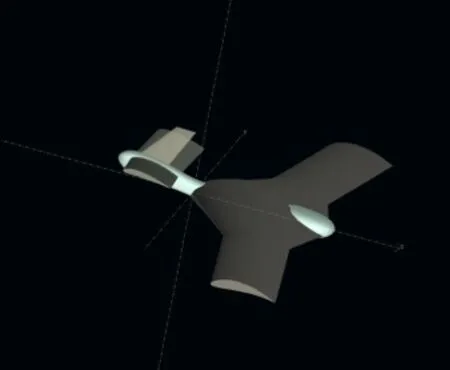
图6 三维气动外形模型
(2)鸭式-飞翼气动布局无人机在低速方面有着突出的表现,最小飞行速度可降至6m/s,比单飞翼式气动布局无人机飞行速度降低约37%。
(3)经过计算和实验验证,鸭翼与飞翼在x 轴、y 轴的距离与其整机升力系数成平方关系,表达式大致为cL=-kx2+en,k 为变化系数,en为修正系数。
