机非交互的交叉口右转机动车行为建模与仿真
2019-08-06辛榴燕龙柯宇
倪 颖, 辛榴燕, 龙柯宇
(同济大学 道路与交通工程教育部重点实验室,上海 201804)
混合交通是我国城市的典型交通特征,机非交互频繁、干扰严重的现象在交叉口尤为突出,特别是右转机动车与非机动车之间冲突严重,事故频发.同时,我国不少交叉口非机动车流量高、密度大,交通参与者不严格遵守优先权,大大增加了交叉口右转机动车与非机动车交互的复杂性:如交叉口非机动车成团通行,特别是在非机动车放行初期;机非交互中大部分表现为机动车与非机动车群体的交互,而非与单车的交互;非机动车群变化快,群体分散和集结灵活,与右转机动车的交互也是伺机而动,这使得右转机动车运行过程中将与不同的交互对象发生多次交互,并根据交互对象状态的变化进行动态多步决策.
现有不少商业微观交通仿真软件,如VISSIM、Transmodeler等预先设定右转车运行轨迹,并且严格规定优先权,难以体现我国交叉口右转车的实际运行特征.因此,有必要建立准确的右转机动车行为模型,准确刻画右转机动车与非机动车的交互行为, 为搭建高精度高可信度的仿真模型提供模型基础,从而为交叉口设施的优化设计和管理控制提供有效的测试平台.此外,近几年自动驾驶技术在世界范围掀起浪潮,而复杂环境下自动驾驶车辆的规划决策问题仍然面临巨大挑战,研究人类驾驶员与非机动车的交互策略和行为特征,并建立相应的行为模型,可为自动驾驶车辆的拟人化驾驶提供模型支撑.
1 研究现状
从行为模型构建来看,右转车和非机动车的交互行为模型主要包括两类:基于接受间隙行为的选择概率模型和基于Logistic回归模型的选择概率模型.不少研究指出交叉口内部机动车与自行车均基于间隙选择通过干扰区,如Taylor、Mahmassani研究了校园附近三个停车控制的低速交叉口处自行车和机动车流之间的穿越和汇合行为,估计了当司机和骑车者横穿和汇入机动车自行车混合流时,个体间隙接受行为的概率模型,然后收集机动车自行车在各种情形下的接受间隙行为数据,并得出独立的机动车和自行车决策模型[1].Winai等建立了Logit模型以研究自行车与右转机动车交互时的间隙接受概率,发现行为与自行车的加减速度、跟驰状态和转弯速度有关[2].钱大琳等分析了机动车穿越前的自身速度,机动车进入干扰区时干扰区内自行车数量,自行车提供给机动车穿越的间隙和后辆自行车的速度等因素对机动车穿越决策的影响,并应用Logistic回归模型建立右转机动车穿越邻道直行自行车的穿越决策模型[3].Ary等研究了瑞典某环形交叉口机动车与非机动车的交互,建立Logit模型以描述单辆机动车在与单辆非机动车发生冲突时的让行行为[4].
然而,大部分研究将右转机动车与非机动车交互的复杂过程简化为间隙选择行为,难以体现右转车驾驶人对环境的连续感知,以及在交互对象选择和决策中的动态性;同时对高密度自行车群的特性考虑不足,个别研究仅考虑干扰区内非机动车的数量,而忽略了群体的其他特征.
从仿真建模的角度来看,目前交叉口混合交通流仿真的常见方法包括元胞自动机模型和社会力模型.元胞自动机模型是离散仿真模型的代表,由Nagel等于20世纪90年代初提出并用于高速公路交通;其基本思想是将运行空间划分为有限个独立单元(即元胞),而交通参与者根据规则在元胞间运动[5].王臻针对平面交叉口右转机动车与直行自行车之间的干扰,分别建立右转机动车、直行自行车元胞自动机模型,确定了元胞在各种状态下,包括随机加速、右转、避险以及碰撞等的运动规则[6];能宁基于元胞自动机模型,考虑我国自行车及行人交通特性,建立了新的混合交通流微观仿真模型[7].李新刚建立了平面交叉口右转机动车与直行自行车的元胞自动机模型,并在模型中引入了连续时问内冲突点被相同类型车辆占据的概率[8].另一类是社会力方法,最早由Helbing提出用于行人仿真,近年来也逐渐迁移到非机动车、机动车、以及混合交通的仿真中,是连续二维仿真模型的代表.如陈大飞建立了机非混合交通相互干扰的社会力模型[9].Schonaue建立了机动车、非机动车、行人在共享区域内的仿真模型[10].李珊珊将交叉口行人和自行车对右转机动车的干扰量化为不同出行方式之间的相互作用力,在广义力的框架下进行微观交通仿真[11].
比较上述两种常见的仿真建模方法,元胞自动机规则简单、运算效率高,适合描述交通流的宏观特征,但其在体现交通流的微观特性方面表现较差,比如难以生成精度较高的轨迹,并进一步进行安全评价等;社会力模型是一个二维模型,能够在参数标定完善的情况下对交通流进行较高精度的微观仿真,但是标准社会力模型对交通参与者的行为动机和决策过程描述模糊.
综上,本文拟从认知过程的角度考虑建立右转机动车驾驶人在与非机动车交互时环境感知—规划决策—控制执行的全过程,刻画右转机动车与非机动车交互行为;发挥社会力模型可进行二维连续仿真的优势,并进一步完善驾驶人感知、决策模块,实现考虑机非交互的右转机动车二维仿真.
2 交互行为分析
2.1 数据采集与处理
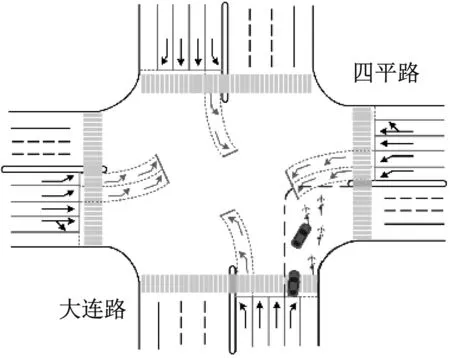
图1 四平路-大连路交叉口渠化图
交叉口所采用的信号控制策略为双向直行加双向左转的四相位信号设计方案.其中右转车的控制采用允许机动车右转相位,且未设置专用的非机动车信号控制方案.根据实地观测,非机动车通常与相同进口道相同流向的机动车同时通行,可认为非机动车跟随机动车的信号控制方案.交叉口信号配时方案见图2.
选定的视频拍摄地点位于大连路靠近交叉口的位置,即从交叉口南进口道的方向进行俯拍.该进口道由一条左转车道、两条直行车道和一条右转车道构成,并且右转机动车道和非机动车道采用水泥分隔带进行分隔,右转车辆驾驶视野良好.选择2016年4月23日和5月22日天气良好的两天,分别于13:00—3:15和2:00—4:05两个时间段进行拍摄,共获得260 min的视频数据,视频拍摄地点、范围以及视频截图如图3所示.
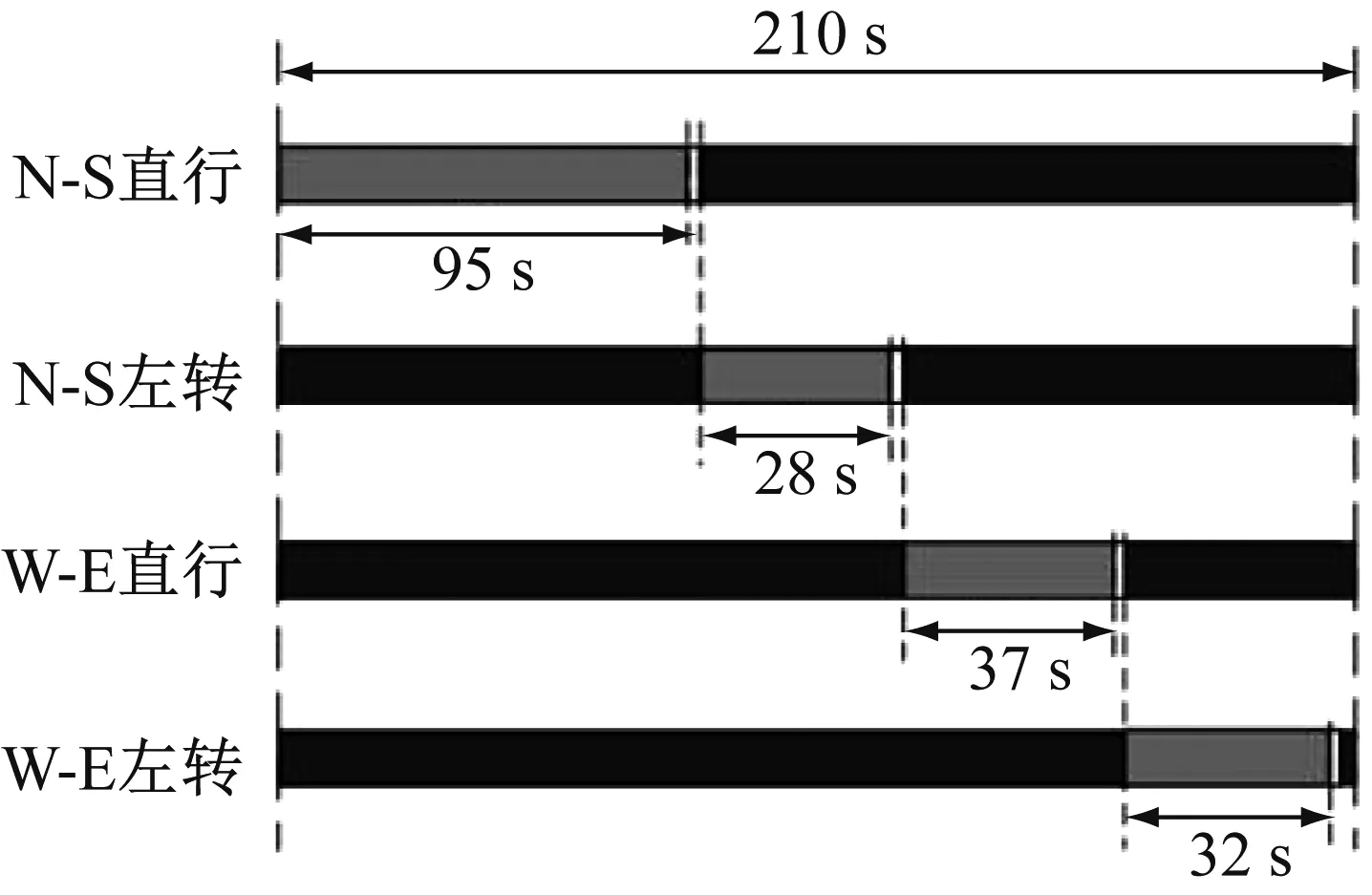
图2 四平路-大连路交叉口信号配时
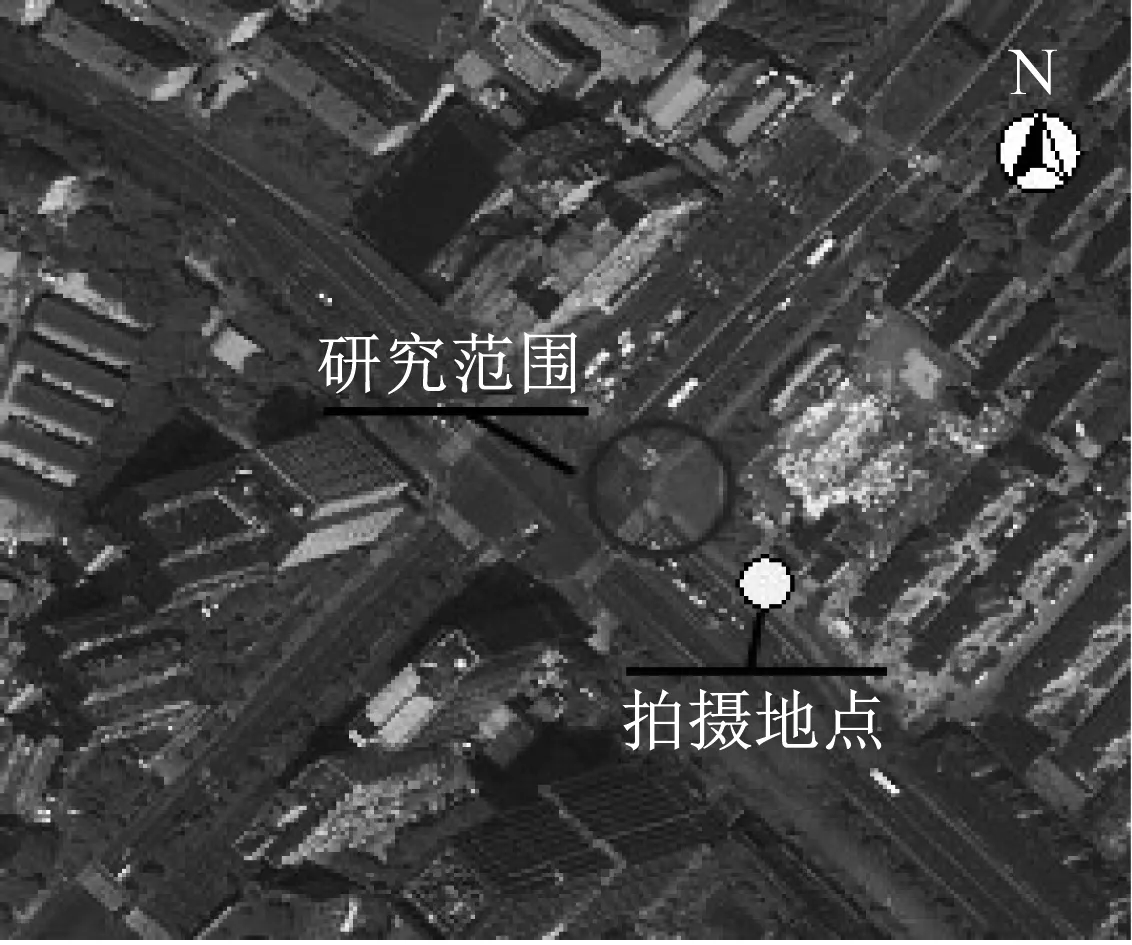
a 视频拍摄地点与范围

b 四平路-大连路交叉口研究范围
通过半自动化轨迹采集软件,以0.12 s为时间间隔进行轨迹提取,最终获得右转机动车轨迹378条以及直行非机动车轨迹871条;轨迹数据包括目标横向和纵向的位置、速度、加速度等.
2.2 机非交互过程分析
交通参与者之间的交互定义:当两个或多个运动的交通参与者,在空间上相互接近且期望运动轨迹产生交叉时,各自运动状态相互影响的现象;与之对应的行为包括通过调整速度或行进方向来实现让行或者不让行交互对象.以该进口一辆右转机动车转弯全过程为例,分析右转机动车与非机动车群体的交互过程,以及该过程中决策及行为的变化特征,如图4所示.

图4 右转机动车与非机动车动态交互过程
Fig.4 Right-turn vehicle-bicycle dynamic interacting process
从图4可以看出,t1到t2期间,右转机动车发现并避让非机动车群组1,其速度在t2时刻开始急剧下降.t2到t3期间,非机动车1脱离而非机动车3加入群组1;t3时刻,右转机动车速度小幅上升,表示驾驶员希望从非机动车1和2间的空隙通过.t3到t4期间,非机动车2—4组成新的群组1,非机动车5选择脱离所在群体,此时驾驶员再次选择减速让行.由此可以看出车辆右转过程中将与不同的非机动车群体交互,交互对象的动态变化导致了右转车的决策也是动态变化的.
3 右转机动车行为建模
3.1 建模框架
从驾驶人认知过程的角度来看,右转机动车与非机动车后并完成右转的过程可以分为环境感知、规划决策、控制执行3个阶段,本文拟建立包含感知层、决策层、控制层的3层框架结构来描述右转车的行为特征.
3.2 感知层建模
感知层由4个关键模块组成,其运行流程依次为驾驶员视野模型、非机动车群组算法、群组选择规则和交互判断规则,如图5所示.

a 驾驶员视野模型
b 非机动车群组算法

c 群组选择规则

d 交互判断规则
Fig.5 Right-turn vehicle-bicycle interaction perception layer modeling
3.2.1驾驶员视野模型
(1) 根据Wickens等提出的用以描述驾驶员注意力分散情况的SEEV模型可知,驾驶员视野始终指向期望目的地方向[12];
(2) 根据车速对视野与前方注意点的影响关系,当车速为40 km·h-1时,驾驶员视野角度为90°~100°[13],而由于右转机动车在交叉口内部通常行驶于较低速度,且驾驶员可能偏转头部以扩大视野,因此取视野角度为180°;
(3) 视野半径r为右转车道的中轴线到出口人行横道线端部的水平距离,实测确定为13 m.
3.2.2非机动车群组算法
Olds对非机动车前后跟随行驶空气阻力的研究表明[14],前后车的间隙可作为区分非机动车群组的主要标准,因此本文将前后车的距离作为非机动车分组算法的关键指标.
搜索相同时刻的非机动车轨迹点,即找到在空间范围内所有同一瞬间的非机动车,获得每一辆非机动车与最邻近前车间的距离,距离分布见图6.

图6 非机动车最邻近前车距离分布
由图6可以看出,分布的形式与广义极值分布比较接近,说明最邻近前车距离集中在某个值附近,属于偏态分布.85%分位数具有一定的统计学意义,此处表示大多数非机动车在通过交叉口时愿意与相邻前车保持的距离.图6显示85%分位数为2 m,与机动车的车宽(约2 m)相一致,表示当两辆非机动车的间距小于2 m时,机动车以任何角度都无法穿过这两辆车之间的间隙,这也是形成群体的一个必要条件.所以本文取其与非机动车车身长(2 m)之和,即4 m作为群组划分阈值.
非机动车分组算法的基本思想是首先将非机动车的位置按照流向方向逆序排列,在本研究中非机动车是从南进口道进入向北行驶,因此按照纵坐标从大到小排列;其次计算每一对前后车的距离并将按阈值进行判断,如果满足要求则认为是同一个非机动车群组,否则认为后车属于下一个群组;最后,将第一个不属于本群组的非机动车赋为下一个群组的头车并更新当前群组编号.
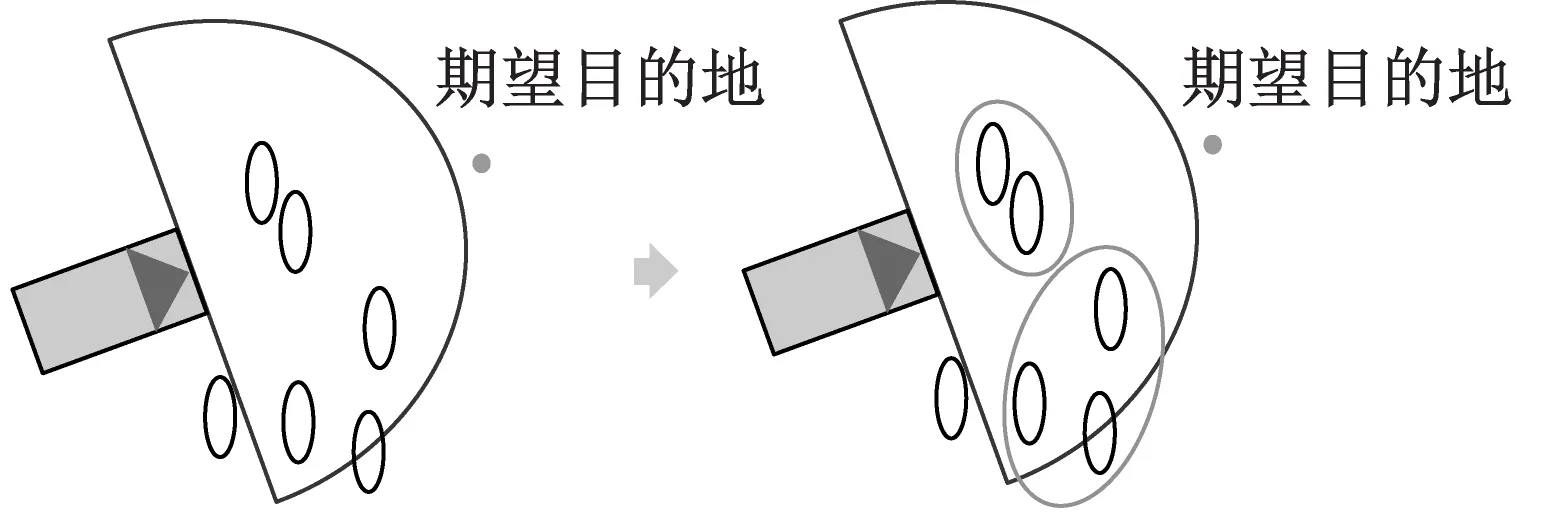
3.2.3群组选择规则
根据Werneke等关于注意力和信息来源的研究,驾驶员往往将注意力分配在有较多信息来源的方向[15].因此机动车与非机动车群的交互过程中,右转车辆驾驶员总是更多地关注距离自己最近的非机动车群组.由此,本文的非机动车群组选择算法分为以下3步:
(1) 计算视野中所有非机动车群体的质心;
(2) 计算每个质心与机动车的距离;
(3) 选择距离最近的几何中心所对应的非机动车群组作为当前潜在交互对象.
3.2.4交互判断规则
获取当前时刻机动车以及群组尾车的坐标并进行比较.如果至少还有一辆非机动车没有越过机动车车头水平线的位置,右转机动车仍然有行为决策的必要性;反之,则意味着当前潜在交互对象中的所有非机动车都已越过与机动车车头水平线的位置,此时非机动车不会等待机动车从其前方绕行,机动车无需决策.
3.3 决策层建模
结合右转机动车-非机动车群交互的特征分析及部分学者已有的研究成果,右转机动车-非机动车交互行为的影响因素主要是从轨迹数据中直接获得的观测型参数,包括机动车特征参数、机非相对位置参数、非机动车群组特征参数,如表1和图7所示.
加载非机动车群组算法,对378条右转机动车轨迹和871条直行非机动车轨迹进行处理,一共提取9 392条行为数据;每一条行为数据包括一辆右转机动车以及对应交互非机动车群的数据.Behavior是因变量,取值为1代表让行,0代表不让行,其余变量是解释变量.在提取所需数据后,将数据样本按1∶1的比例随机划分为训练集和测试集,最终得到训练集4 741条数据以及测试集4 651条数据,利用该数据建立二项Logit建模,结果如表2所示.

图7 特征参数示意
表1 影响因素列表
Tab.1 Influence factors list

编号参数12右转机动车特征参数右转机动车速度(V)/km·h-1右转机动车越过停车线的时间(T)/s34机非相对位置参数右转车与车群头车的纵向车头距离差(Dlead)/m右转车与车群最近车辆的横向间隙(Gclose)/m56789101112非机动车群组特征参数非机动车群的头车速度(Vlead)/km·h-1非机动车群的尾车速度(Vrear)/km·h-1非机动车群体的长度(L)/m群体内的非机动车数(N)/辆让行最近车辆后群体中的剩余车辆数(Nleft)/辆车群中最近车辆的下一个间隙(Gnext)/m与上一个时刻的非机动车群是否相同(S)/无群组中的电动自行车比例(Epct)/ 无

表2 Logit建模结果
基于Logit建模结果右转车与非机动车群体的交互决策机理解释如下:右转机动车速度(v)对于让行行为是负影响,随着速度增大,驾驶员为了转向舒适通常不会急刹,因此右转机动车倾向于不让行非机动车群.越过停车线的时间(T)越长,右转车让行概率越大,说明右转车驾驶员等待越久,行为越谨慎.与车群头车的纵向距离差(Dlead)系数为负,表示右转车在纵向位于头车下方变化到上方时,倾向于不让行.与车群最近车辆的横向间隙(Gclose)表示右转车与非机动车群的横向接近程度,该值越小,右转车与非机动车群越接近,因此倾向于选择让行,否则可能产生碰撞.
非机动车车群的头车速度(Vlead)和尾车速度(Vrear)对于让行行为的影响都是正向的,说明头车或者尾车的速度越高,右转机动车为保证非机动车的安全都会采取谨慎行为,因此选择让行概率越大.非机动车数(N)和群体长度(L)的系数符号相反,表示解释变量对于让行行为有相反的影响,表示在同等非机动车数的情况下,右转车更倾向于让行长度较小、聚集度较高的非机动车群,而不是车车之间间隙很大的群体.
剩余车辆数(Nleft)越大,表明右转车即使让行最近的一辆非机动车,仍与一个较大的群体在交互,因此右转车越倾向于让行.最近车辆的下一个间隙(Gnext)越大,右转机动车越可能利用这个间隙,穿越并打破现有的非机动车群体,从而减少自身延误,因此右转车选择让行的概率越大.
由Logit建模结果以及对测试集的划分,预测测试集的行为并绘制混淆矩阵,如表3所示.

表3 行为预测结果
从表4可以看出,Logit模型对于让行行为的预测精度为89.03%,而不让行行为的精度为82.22%,因此该模型对让行的预测效果比不让行更好.模型整体的预测精度为87.65%,认为可以比较准确预测右转机动车与非机动车群的交互行为.
3.4 控制层建模
控制层的计算核心是选取一个合适的加速度来执行当前的决策.本文采用安全余量来表示交互双方期望的通过冲突点的时间差,下面根据不同的行为,结合非机动车的边界特征、安全余量提出考虑非机动车群组的控制策略.
若采取让行,右转车将考虑如何让行整个非机动车群体,此时注意力集中在非机动车群体的尾车,并计算后于车群尾车通过冲突点的加速度.若采取不让行,右转车将考虑先于整个非机动车群体通过冲突点,因此以非机动车群体的头车为基准,计算先于头车的车头通过冲突点的加速度.
具体计算方法如图8、式(1)和式(3).
(1)
(2)
(3)


a 让行策略

b 不让行策略
上述控制策略考虑了非机动车群组的特征,不仅能对不同群体作出不同反应,还能对相同群体处于不同位置时做出不同反应;安全余量的引入使得双方到达冲突点的时间差有盈余,因此可以保证交互双方的安全运行.
4 机非交互仿真建模
4.1 改进社会力模型
目前主流的商业仿真软件常采用基于规则的静态决策机制,在交互中缺乏动态检测和决策的特征;此外,基于车道的仿真使得轨迹单一化,不能体现实际场景下车辆的轨迹多样性.为实现车辆的二维运动特征,本文选取社会力模型作为整个仿真的底层执行模型,并结合行为建模的结果进行改进,以弥补标准社会力模型在感知和决策方面的考虑不足.
标准社会力模型主要包括三个部分:目的地驱使力Fdriving,表达向目的地运动的动机;来自其它用户的排斥力Fuser,表达避免与其它用户发生碰撞的行为倾向;来自运动空间边界的排斥力Fborder,表达用户所期望的较为舒适的运动范围.
4.1.1标准社会力模型
miai=Fi=Fd+Fu+Fb
(4)
式中,i是用户编号,mi是用户质量,单位kg;ai是用户加速度,单位m·s-2;Fi、Fd、Fu、Fb分别是用户受到的总社会力、目的地驱使力、来自非机动车群的排斥力、边界排斥力,单位均为N.
由于在标准社会力模型中,用户之间交互的唯一依据是位置关系.任意两个用户之间的社会力总是由一方的位置指向另一方的位置,力的大小也仅按照双方之间的距离来确定,因此标准社会力模型不能很好地表达行为的动机和决策.改进后的社会力模型用交互力FI代替非机动车排斥力Fu,以实现让行或不让行行为的执行,体现了行为决策.
4.1.2改进社会力模型
miai=Fi=Fd+Fu+Fb
(5)
式中,i是用户编号,mi是用户质量,单位kg;ai是用户加速度,单位m·s-2;Fi、Fd、Fu、Fb分别是用户受到的总社会力、目的地驱使力、来自非机动车群的交互力、边界排斥力,单位均为N.
(1) 目的地驱使力
(6)

(2) 非机动车群交互力
Fu采用运动层建模中的ayield以及anotyield,根据以下规则执行:①无交互,Fu=0;
②有交互且让行,Fu=miayield;
③有交互且不让行,Fu=mianotyield.
(3) 边界排斥力
(7)
式中,Aik为用户i受到边界k的交互强度系数,单位为m·s-2;Bik为用户i受到边界k的交互影响系数,单位为m;ri为用户i心理空间半径,单位为m;dik为用户i到边界k的连线距离,单位为m;nlk为方向向量,由边界k指向主体用户i;fik为用户i的各向异性参数[16],无单位.标准社会力模型中,边界排斥力与来自用户的排斥力形式相同.
各向异性参数表示来自不同方向的力对用户产生不同影响,该参数由常量因子λi[17]、力的方向与用户前进方向的夹角φiU、有效视野参数q决定,表达如下:
(8)
式中:U是用户或者边界;当用户或者边界落在视野范围内时,q=1,反之q=0,即社会力不起作用;常量因子λi取值为0.3.
4.2 仿真流程
在行为模型感知层—决策层—执行层的基础上,利用matlab搭建仿真平台,仿真流程如图9所示.
4.3 模型标定
待标定的模型分别为标准社会力模型(SSFM)、改进社会力模型(LSFM).右转机动车为避免转弯角度过大或过小而碰撞路缘石,通常行驶于一个期望的转向范围内,因此两个模型中设置了内、外两个边界,相应参数需分别标定.以仿真和真实轨迹点的坐标平均差值为目标函数,采用遗传算法对两个模型分别进行标定,结果如表4所示.
5 仿真结果与评价
将非机动车轨迹作为环境变量输入,采用标准社会力模型(SSFM)以及结合Logit的改进社会力模型(LSFM)对右转机动车的轨迹进行模拟,并进行仿真效果评价.具体将从轨迹分布、运行效率和安全等方面评价模型精度.

图9 仿真流程
表4 模型标定结果
Tab.4 Model calibration results

模型松弛时间τ/s内边界A/N内边界B/m外边界A/N外边界B/m机非排斥力A/N机非排斥力B/N机非排斥力λ/NSSFM3.9830.883 519.966 41.032 47.801 40.073 718.836 10.905 8LSFM3.998 72.694 611.857 92.020 87.126 3—————————
5.1 轨迹评价
(1) 轨迹图
利用两个模型进行仿真的轨迹和实证数据轨迹如图10所示,其中图10a为从视频中提取的真实轨迹,图10b为使用标准社会力模型(SSFM)模拟的轨迹,图10c为使用结合Logit的改进社会力模型(LSFM)模拟的轨迹.
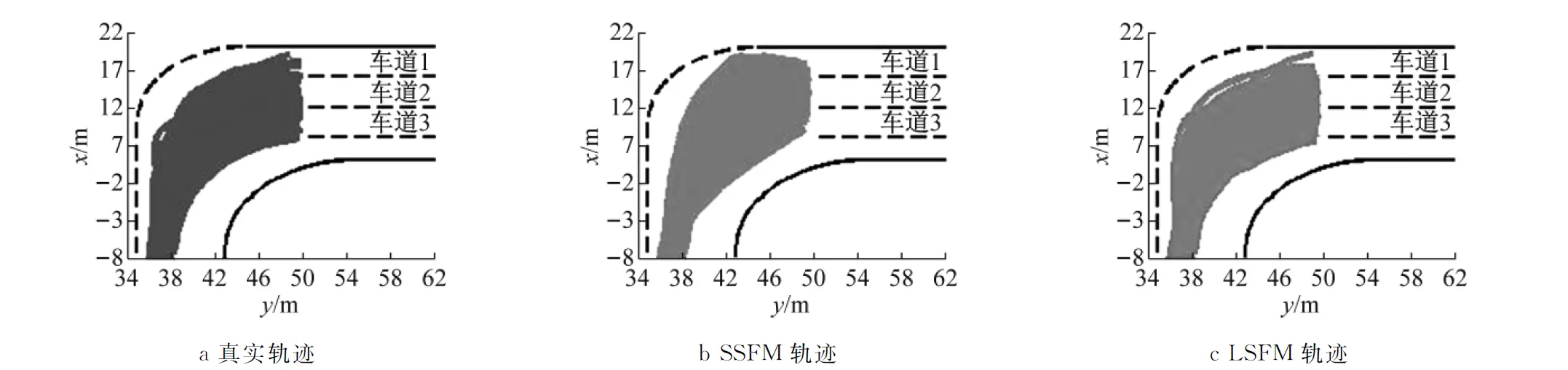
图10 轨迹图
Fig.10 Trajectory figure
从图10可看出,SSFM轨迹与真实轨迹相比,转向车道1和车道3的部分轨迹出现了明显的偏移,呈现近乎直线或者弧度过大的情况.改进的LSFM模型与真实轨迹相比,重合度较高,弧度均匀变化,表明转向平滑.
(2) 轨迹覆盖率
采用轨迹覆盖率[18]的方法对仿真轨迹进行定量评价.将通行空间划分为1 m×1 m的方格,若轨迹点落在某方格内,则该方格赋值为1,否则为0.
经计算,SSFM的轨迹覆盖率为94.15%,LSFM的轨迹覆盖率为97.07%,因此,改进后的社会力模型比标准社会力模型的轨迹覆盖率更高,仿真效果更好.
(3) 均方根误差
计算所有轨迹在横、纵坐标上的均方根误差(RMSE),结果如表5所示.

表5 轨迹均方根误差
从均方根误差可以看出,LSFM的X坐标误差稍有增大,但Y坐标误差显着减小,总体而言达到了更好的效果.
(4) 车道选择比
车辆在转向后有回到车道中心线的趋势,因此右转车转入各个车道的比例可以从侧面说明轨迹 的仿真效果.从最内侧车道到最外侧车道分别标记为车道1、车道2、车道3,统计3个仿真模型和真实轨迹的车道选择比例,最终结果如表6所示.

表6 车道选择比
从车道选择比来看,SSFM中车道1和车道3的比例与真实值相差较大,这是因为SSFM中非机动车对机动车排斥力的纵向分量促使机动车轨迹向上偏移;而LSFM的车道选择比与真实值比较接近,且两者差别不大,认为可以较好地表现轨迹在不同车道的分布特征.
5.2 效率评价
选取行程时间指标评价,结果如图11所示.
由图11,SSFM、LSFM的标准差均比真实值更小,比较集中,这是由于现实场景中不同驾驶人对于速度的追求差异大,且受到外部道路交通环境的随机因素影响.从均值来看,SSFM比真实值更高,表现为行程时间偏长,而LSFM落在真实值附近,认为改进后的社会力模型要优于标准社会力模型,能达到不错的效果.

图11 行程时间对比
Fig.11 Travel time comparison
5.3 安全评价
PET(Post-encorachment Time)是指前一个交通参与者离开冲突区域的时刻到下一个交通参与者到达冲突区域的时刻,因此可以反映交互过程中双方实际通过冲突点的时间差,能够反映交互双方在时间上的接近程度.选取PET指标进行计算和统计,结果如图12所示.
由图12,SSFM的PET均值比真实值更大,方差比较接近,说明仿真的轨迹相比与真实轨迹更保守,先后双方通过冲突点的时间差更大;LSFM的均值与真实值非常接近,说明改进的社会力模型在平均水平上能达到较好的效果.
总体而言,改进社会力模型能较好地模拟行为决策点的位置,所以可认为改进的社会力模型能比较真实地模拟右转机动车-非机动车的交互现象.
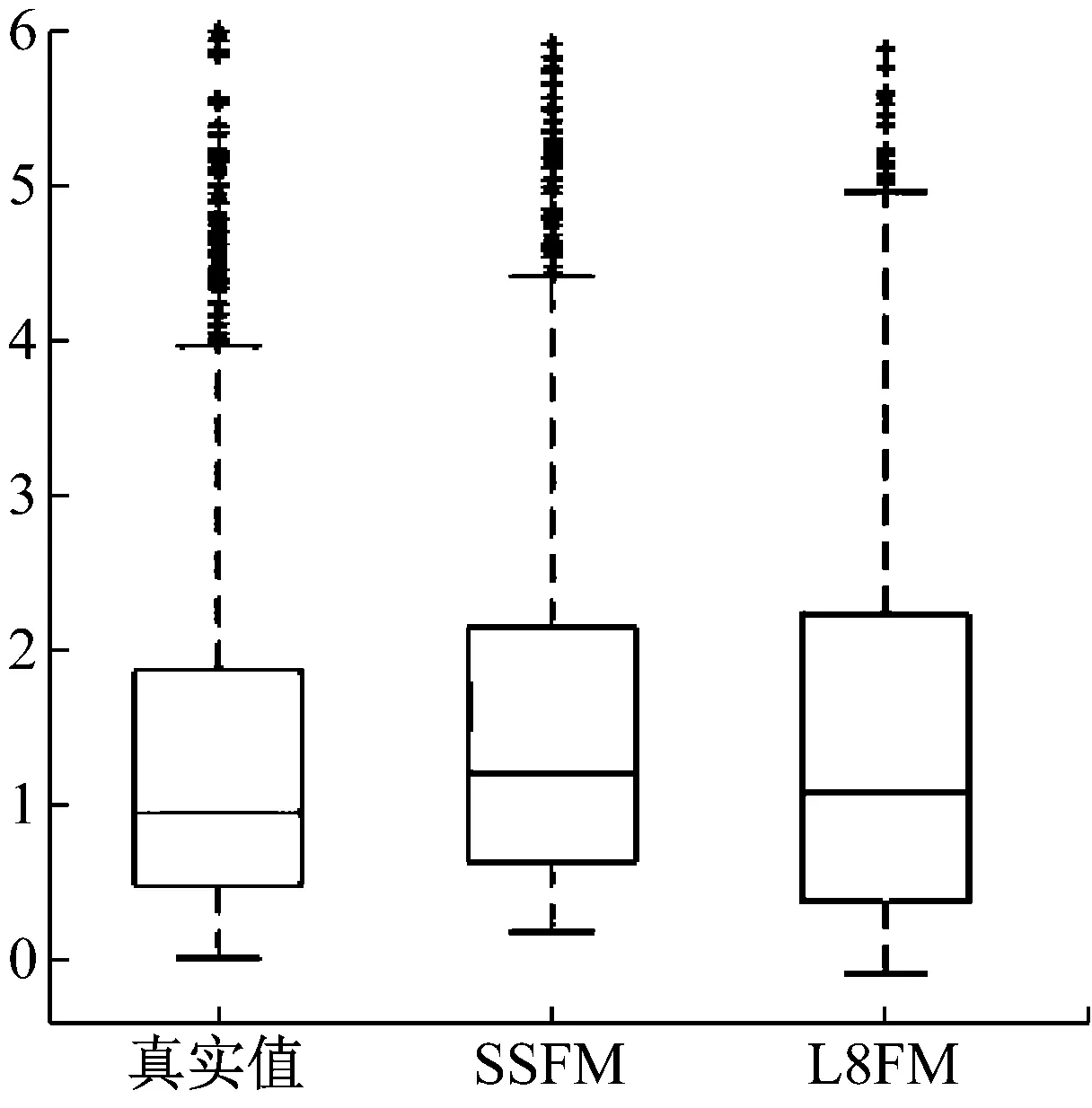
图12 PET对比
6 结语
本文从右转机动车驾驶人认知过程的角度,建立了包含环境感知、规划决策、控制执行的的右转车与非机动车交互为模型.针对我国交叉口非机动车流量高,非机动车成群通过的特点,解析了右转车与非机动车群体的动态多步交互特征,并将logit模型与社会力模型相结合,实现了右转机动车二维仿真.
然而,目前的研究假设右转机动车为主导的决策,未针对非机动车建立非机动车行为模型,仿真中使用的是实际的非机动车轨迹;此外对于右转车的交互对象仅考虑了非机动车,并未涉及行人.后续研究中将进一步构建同时包括机动车和非机动车的行为模型,同时考虑右转机动车与非机动车、行人连续交互行为,进一步完善模型.
