无人飞行器自主气体探测系统及设计特征
2019-08-02陈志娟
冯 乐,陈志娟
(天津同阳科技发展有限公司 天津 300384)
0 引 言
汽车排放的主要污染物是碳和氮的氧化物,这些数据借助半导体气体传感器很容易检测到,现有系统利用 GPS进行数据采集和遥感。采用装备了嵌入式系统的无人机或移动机器人可以收集比人工操作更密集、分辨率更高、更准确的环境样本,这也使得工作环境更加安全。
污染和城市空气质量问题是危害公共卫生安全的主要环境风险。气体排放导致了各种呼吸疾病和环境问题,如酸雨频繁和臭氧层消耗。污染物可以是交通、工业和火灾的废气排放,也可作为化学品事故的后果排放。
无人机或移动机器人已经开始在生活中广泛使用,成为当今数据采集和遥感领域最重要的技术之一。这在许多研究中得到了高度重视,尤其是其高分辨率和位置精度等优点。它们对地球生态系统和环境科学研究的重要性已在诸多实践中被证实。其民用用途包括气体检测的各种应用,例如获得气体分布图、实时监测污染物气体的排放量,以及在存在环境问题的地理区域进行气体源定位。调查表明,当前所有实施中存在以下问题:
①受到自适应学习算法的影响,无人机的飞行自主性有限。
②小型无人机无法携带过重的测量设备。
③在联合优化化学传感器的飞行轨迹和能耗方面开展的工作还很少。
1 工作原理
本项目的总设备放置在一辆车内,如图 1所示,配置 GPS(全球定位系统)模块,以得到所检测车辆的位置和无人机的位置,其值显示在 LCD(液晶显示器)上。应用一些传感器并连接到微控制器,通过气体传感器可以检测到来自车辆的气体参数。气体传感器通过 ADC(模拟-数字转换器)模块将传感器输出的模拟数据转换为数字量形式输出给微控制器进行处理。当这些参数值超过阈值时,向 RTA发出报警指示,报警信息包括目标车辆的准确位置;同时向目标发送报警信息,命令目标停止运行,并通过GPRS在网页上发布。
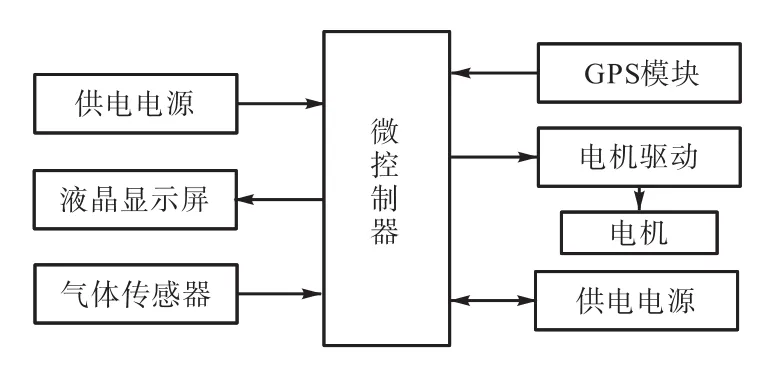
图1 系统连接图Fig.1 System connection diagram
2 硬件特征
微控制器:此部分构成了整个项目系统的控制单元,是系统的大脑和核心,基本上由一个微控制器及其相关电路组成,如带电容的晶体、复位电路、上拉电阻(如果需要)等。微控制器构成了项目的核心,因为它控制着被连接的设备,如各种气体传感器、GPS模块等,并根据所写的程序与设备通信,包括上传至LCD屏显示、发送报警信息等功能。
ARM7TDMI:ARM 是 Advanced RISC Machine的缩写,ARM 处理器是英国 Acorn有限公司设计的低功耗成本的第一款 RISC微处理器,它是一类处理器,也是一种技术的名称。ARM处理器本身是32位设计,但也配备16位指令集,一般来讲比等价32位代码节省达 35%,却能保留 32位系统的所有优势。与复杂指令集计算机(Risc)设计相比,RISC指令集及其相关的解码机制要简单得多。
液晶显示器(LCD):液晶显示器(LCD)是一种平板显示器,采用液晶光调制特性的电子视觉显示器,液晶不直接发光。LCD可显示任意图像或隐藏的固定图像,如数字时钟中的预设字、7段数字的显示,如数字时钟。
CO2传感器:家庭和工业气体泄漏检测设备,适用于液化石油气、正丁烷、丙烷、甲烷、酒精、氢气、烟气的检测。传感器RS的表面电阻是通过串联的负载电阻RL的影响电压信号输出获得的。
GPS:全球定位系统。
GPRS:GPRS(General Packet Radio Service)是一种基于数据包的无线通信服务数据承载服务,作为GSM、CDMA 和 TDMA(ANSI-I36)网络的网络覆盖提供。GPRS采用分组无线原理,在 GSM 移动台和外部分组数据网络之间高效地传输用户数据包。分组交换是先将数据分割成单独传输的分组,然后在接收端重新组装。GPRS支持世界领先的基于分组的互联网通信协议Internet Protocol(IP)和X.25(主要在欧洲使用的协议)。GPRS允许任何现有的 IP或 X.25应用程序通过 GSM 蜂窝连接进行操作。具有 GPRS功能的蜂窝网络是互联网和X.25网络的无线扩展。
直流电动机:直流电动机电流流过的线圈产生与线圈中心对准的电磁场。通过接通或断开线圈中的电流,可以接通或断开线圈中电流产生的磁场,也可以通过控制线圈中的电流方向,将其产生的磁场的方向切换 180°。
3 结 论
本文设计和介绍了一种以无人机为移动载体,用于气体分布检测和泄漏定位的嵌入式平台。该测量仪的主要特点是功耗低、体积系数小,可依靠自身的可充电电池实现较长的自主权。现场试验表明,装有VOC目标MOX传感器的测量仪器在独立和作为无人机有效载荷安装时的灵敏度可靠。
