插电式柴电混合动力汽车规则控制及处理器在环测试
2019-07-29隗寒冰任培林
隗寒冰 任培林
重庆交通大学机电与车辆工程学院,重庆,400074
0 引言
近年来,柴油发动机以其良好的动力性、经济性和可靠性在交通运输领域得到了广泛应用,尤其是日益严峻的能源危机让柴油发动机的应用领域从传统的商用车逐渐拓展到乘用车[1]。对于采用选择性催化还原(selective catalytic reduction, SCR)后处理技术路线的柴油车,在城市循环工况中车辆频繁启停,使得柴油机长期处于低转速、低负荷工况,从而导致排气温度低,催化转化效率不高。为提高柴油机低负荷下的排气温度,给SCR系统提供适宜的温度窗口条件,插电式柴电混合动力汽车采取双动力源驱动,为提高低负荷下排气温度提供更多的控制自由度。在解决混合动力源能量分配及协调控制问题的方法中,动态规划(dynamic programming, DP)算法可不依赖近似计算来逼近极值,从而能保证全局最优解,且相比于等效燃油最小控制策略(equivalent consumption minimum strategy, ECMS),动态规划算法对变量约束的处理更加方便,因而受到国内外的广泛关注。
动态规划算法应用所需计算资源与状态变量数量成正比,因此动态规划最优解通常作为评判目标控制策略燃油经济性的指标[2-3]。针对动态规划算法应用在整车能量管理策略上出现的执行效率低等问题,文献 [4] 采用二次样条逼近和局部线性逼近来计算成本函数极值,研究结果表明算法求解时间大幅缩短,但易产生局部最优解;文献 [5] 根据电池充放电时的电流大小来限制电池荷电状态(state of charge,SOC)值的可行域,从而可减少动态规划算法运行时的计算量。针对动态规划结果提取规则时计算量大的问题,文献 [6] 根据动态规划算法优化结果拟定出了模糊控制规则;文献 [7] 提取了功率分配控制规则,该规则可同时表示工作模式和转矩分配;文献 [8] 分别提取出了模式切换规则和功率分配规则,并采用遗传算法优化提取规则的边界条件。为解决动态规划算法需要预知前方工况信息的问题,文献 [9] 采用随机动态规划(SDP)算法来预测未知工况;文献 [10] 利用学习向量化神经网络来识别实际工况,并在线调节规则控制参数。目前关于目标函数权值系数选择方法的研究较为少见,文献 [11] 依据试错法确定权重因子,但该方法缺乏理论依据。
本文在权衡计算效率和求解精度后,对整车动力学模型进行合理简化,并对所求目标函数权重因子进行归一化处理。根据不同权重系数下的离线计算结果,提取出满足国Ⅴ排放法规约束下最优控制解的典型特征。最后利用上述特征对CD-CS策略进行改进优化并进行仿真计算及处理器在环(processor in loop, PIL)测试。
1 插电式柴电混合动力汽车动力系统建模
本研究的插电式柴电混合动力汽车为单轴并联式结构,其动力系统结构见图1,各部件规格参数见表1。该混合动力系统中柴油机与ISG电机采用湿式多片离合器相连,ISG电机和电控机械式自动变速箱(automated mechanical transmission ,AMT)采用换挡离合器相连。整车控制器通过控制湿式多片离合器的分离和接合,可将整车运行情况划分为纯电动机驱动模式、发动机驱动模式、联合驱动模式、行车充电模式、制动能量回收模式五种工作模式。
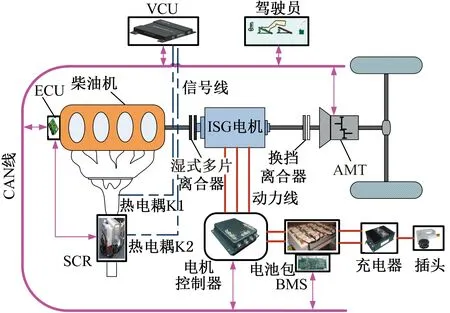
图1 传动系统结构布置Fig.1 Schematic of powertrain system表1 动力系统基本参数Tab.1 Primary parameters of powertrains

部件性能指标参数值柴油机排量(L)1.4额定功率(kW)72最大扭矩(N·m)184ISG电机峰值功率(kW)15最大扭矩(N·m)110动力电池额定容量(A·h)40额定电压(V)330单体电池数量25
基于准静态假设,忽略车辆模型中复杂的高阶动态特性(即不考虑发动机的动态迟滞响应、AMT换挡时间和离合器滑摩损失),则可将图1所示的整车结构简化为发动机-ISG电机、电池、SCR系统和传动系统四大子系统。图1中,ECU为电子控制单元,VCU为整车控制器,BMS为电池管理系统。
1.1 发动机-ISG电机模型

(1)
(2)


(a)燃油消耗率MAP图

(b)燃油消耗率近似逼近曲线图2 发动机油耗Fig.2 Fuel consumption of engine
ISG电机模型同样采用实验建模方法来表示,其机械特性受效率的影响,则电机输出功率可表示为
(3)
式中,Tm为电机转矩;nm为电机转速;ηdis、ηchg分别为电机的放电效率和充电效率。
1.2 电池模型
电池内部电化学反应过程复杂,可忽略电池温度对端电压及内阻的影响,将电池简化后使用内阻模型来表示电池主要性能,如图3所示。

图3 电池内阻模型Fig.3 Battery internal resistance model

Im=
(4)
(5)
式中,E为电池开路电压;SSOC为电池荷电状态(SOC)值;Rint为电池内阻;ηm为电机效率;Qbat为电池最大容量。
1.3 传动系统模型
车轮需求功率和需求转速可根据车辆纵向动力学计算得到,将整车视为一个质点,可表示为
(6)
(7)
式中,Preq为车轮需求功率;nreq为需求转速;ηt为传动系统效率;m为整车质量,kg;f为滚动阻力系数;v为整车车速,m/s;CD为风阻系数;A为迎风面积,m2;δ为旋转质量换算系数;r为车轮半径,m。
AMT模型的建立则依据二参数(节气门开度、车速)换挡规律进行,得到发动机驱动、电动机驱动、发动机与电动机联合驱动时的最佳经济性换挡规律曲线[12],以AMT末端需求功率为输入,即可确定当前时刻的最佳挡位。
1.4 SCR系统模型
SCR系统由安装在排气管上的尿素喷射装置提供还原剂NH3,在催化剂的作用下将NOx有选择性地还原成N2。针对SCR系统要求较高的NOx转化效率和较低的氨逃逸量(用来反映未参与NOx转化的氨排放量),文献 [13-14]研究发现,瞬态下NOx转化效率与催化器表面氨覆盖率及催化温度有关,并以此建立了实验模型,该模型精度较高,可直接用于尿素喷射策略。
本文对文献[14]中复杂的SCR反应过程进行简化处理,忽略局部化学反应过程,简化后的模型包含两部分:温度模型和NOx转化效率模型。催化温度模型可表示为
(8)

SCR系统出口处NOx排放可用NOx转化效率模型表示,即
(9)

图4所示为NOx转化效率与SCR系统出口温度的关系,根据实验测量数据,可以拟合出NOx转化效率随温度的变化曲线,即
y=-0.001 5x2+1.026 7x-86.245 2
(10)

图4 SCR系统出口温度对转化效率的影响Fig.4 Effect of SCR system outlet temperature on transformation efficiency
2 动态规划算法
2.1 算法原理
在给定的驾驶循环工况下,将每一时刻的车速作为已知量,车轮需求功率和需求转速可通过车辆纵向动力学方程(式(6)和式(7))逆向求解,AMT挡位则通过车速和整车需求功率,根据经济性换挡规律曲线插值求得,每一时刻两动力源的分配受总需求功率约束,可表示为
Preq(k)=Pe(k)+Pm(k)
(11)
动态规划算法寻找最优的动力分配关系首先要确定目标函数,而关于有限时间域内的最优目标函数问题的求解,通常根据时间域将其离散为多级、单阶段的问题进行处理。将整个循环工况分为N个阶段,每个阶段的时间为Δt,每一阶段的油耗和排放指标取决于当前阶段整车的控制变量u(k)和状态变量x(k),在离散条件下的目标函数为
(12)
x(k+1)=g(xk,uk)
(13)
式中,L为单阶段成本;J为累积成本函数;g为状态转移函数。
本文的研究对象为发动机油耗和SCR系统出口处排放,此时表征瞬时油耗和排放的单步目标函数可定义为

(14)

通过上述分析,目标函数中属于独立变量的有Pe、Pm、SSOC、tSCR,综合考虑计算效率和计算准确性,按间隔0.006将电池荷电状态值SSOC的取值范围[0.3,0.9]离散为100 个网格点,按间隔10 ℃将SCR系统出口温度tSCR的取值范围[20,520](℃)离散为50个网格点,按间隔1 kW 将电动机输出功率的取值范围[-15,15](kW)离散为30 个网格点,且状态变量和控制变量满足如下约束条件:
(15)
式中,下标i=e,m,分别表示发动机和电机。
根据贝尔曼最优性原理,基于动态规划算法求解0~N阶段最优指标递推方程,其表达式如下:

(16)
k=0,1,…,N-1J*(x(N),N)=0
为避免常规动态规划算法应用时出现的“维数灾难”问题,研究人员提出许多改进算法来提高计算效率以减少存储容量,如状态增量动态规划法(state increment dynamic programming,SIDP)、离散微分增量动态规划法(discrete differential dynamic programming,DDDP) 、逐次逼近动态规划法(dynamic programming with successive approximation,DPSA)等,但上述方法多以牺牲计算精度为代价。本文将第k阶段的所有约束范围定为可达状态集,约束内所有控制定为容许控制集,逆向插值求解过程均控制在该容许控制集内进行,以缩小求解范围,节省计算资源。
在动态规划逆向寻优过程中,为避免计算在不可达区域内进行,可对电机转矩取值范围进行限制,其表达式如下:
(17)
式中,Tm_req为电机需求转矩;Tdis_max、Tchg_min分别为电机在当前转速下作为电动机输出的最大转矩和作为发电机输出的最小转矩;Tbat_dis_max、Tbat_chg_min分别为电机在当前放电电流下的最大输出转矩和充电电流下的最小充电转矩。
2.2 仿真结果分析
动力电池SOC初值设为0.9,末状态期望值为0.3,外界环境20 ℃,在3个新欧洲行驶工况(new European driving cycle,NEDC)下分别对油耗和SCR系统出口处排放进行单目标和多目标优化。相比于传统发动机油耗MAP建模方法,本文采用线性函数近似逼近油耗率方法进行动态规划求解时,能够缩短38%的求解时间。
2.2.1单目标优化结果分析
分别以整车燃油经济性,NOx、PM排放为优化目标,研究单一目标权值系数下优化控制策略对发动机工作范围的影响。
图5所示为整车燃油经济性最优(w1=w2=0,因成本函数对w3敏感度较小,本文取w3=500)时发动机工作点的分布情况,可以看出,发动机主要在中等负荷区域工作,发动机总运行时间为382 s,占总循环工况(1个循环工况为1 180 s,总循环工况为3个循环工况,即3 540 s)的10.8%。

图5 发动机工作点在油耗MAP图分布Fig.5 Engine operating distribution for fuel consumption MAP

图6 发动机工作点在NOx排放MAP图分布Fig.6 Engine operating distribution for NOx emission MAP
图6所示为整车SCR系统出口处NOx排放最优(w1=1,w2=0,w3=500)时发动机工作点的分布情况,可以看出,此时发动机主要在低负荷区域工作, 发动机总运行时间为511 s,占总循环工况的14.4%。
图7所示为整车SCR系统出口处PM排放最优(w1=0,w2=1,w3=500)时发动机工作点的分布情况,可以看出,发动机主要在低负荷区域工作,发动机总运行时间为396 s,占总循环工况的11.2%。

图7 发动机工作点在PM 排放MAP图分布Fig.7 Engine operating distribution for PM emission MAP
由动态规划算法优化结果可知,针对油耗、NOx排放量和PM排放量的单目标优化发动机工作点,分别在油耗MAP图中低油耗区域、NOx排放MAP图中低NOx排放区域、PM排放MAP图中低PM排放区域范围内分布。
2.2.2油耗和排放多目标优化分析
为了研究油耗和SCR系统出口处排放的折中关系,各权值系数分别取值如下:
(18)

图8 NOx排放与油耗的折中关系Fig.8 NOx emission and fuel consumption trade-off relationship
图8所示为不同权值系数下SCR系统出口处NOx排放量与油耗的折中关系,可以看出,当目标函数中w2为某一定值时,随着w1的不断增大,NOx排放量大幅降低,而油耗的增幅相对较小。若保持w1值不变,则随着w2的增大,油耗大幅增加,而NOx排放量变化不大。
图9所示为不同权值系数下SCR系统出口处PM排放量与油耗的折中关系,可以看出,当目标函数中w1为定值时,PM排放量随着w2的增大而减小;当w1=0或0.1时,油耗随着w2的增大逐渐增大,随着w1取值的增大,油耗随着w2的增大呈现先减小后增大的趋势,其原因为PM排放最优工作范围和燃油经济性最优工作范围存在交叉耦合的情况,w2的增大使得发动机工作点迁移至两者重叠区域。

图9 PM排放与油耗的折中关系Fig.9 PM emission and fuel consumption trade off relationship
国家标准GB 18352.5—2013(国Ⅴ排放法)中规定的轻型汽车污染物排放限值NOx排放不超过0.18 g/km,PM排放不超过4.5 mg/km。综合考虑,对权值系数w1=0.5、w2=0.1所表示的目标函数进行优化以提取规则特征,相比单目标优化的燃油经济性最优情况(w1=w2=0,w3=500),多目标优化的NOx排放量减少17.6%,PM排放量减少0.74%,相应油耗只增加了1.87%。
3 基于动态规划结果的改进CD-CS规则控制
动态规划算法的计算量大是其不能实时应用的一个重要原因。为将动态规划算法应用于整车实时控制,可从动态规划离线计算结果中提取动力源工作特征,以指导规则控制策略的设计。根据前文所确定的权值系数,目标函数可由下式表示:
(19)
根据动态规划优化结果中SCR系统出口温度的变化过程,可将其分为起燃升温和SCR温度保持两个阶段,见图10。在此过程中,整车工作模式0~5分别定义为:怠速停机、制动、单机驱动、发动机驱动、联合驱动、行车充电,见图11。

图10 SCR系统出口温度变化曲线Fig.10 SCR system outlet temperature change curve
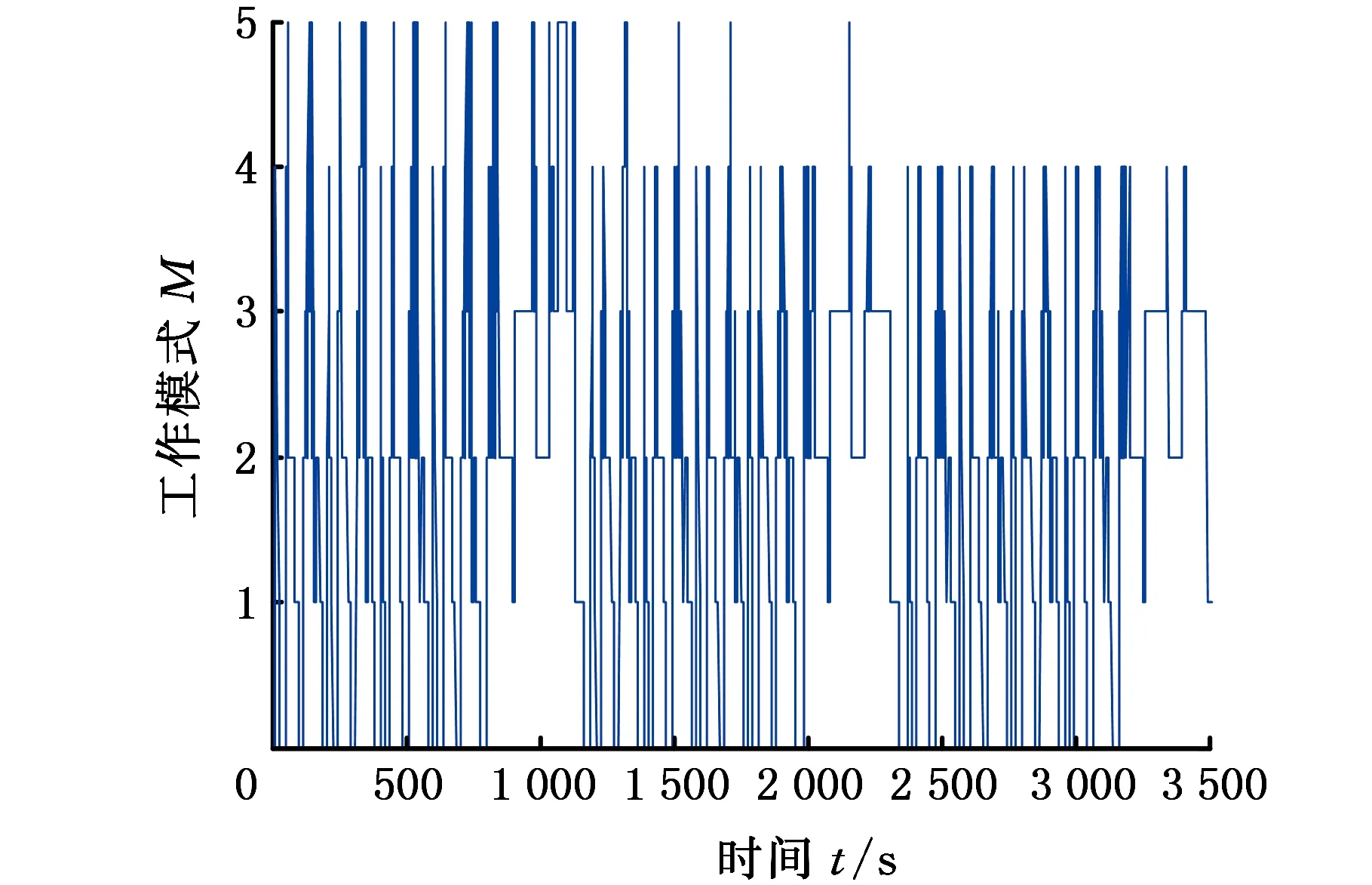
图11 整车工作模式Fig.11 The vehicle working mode
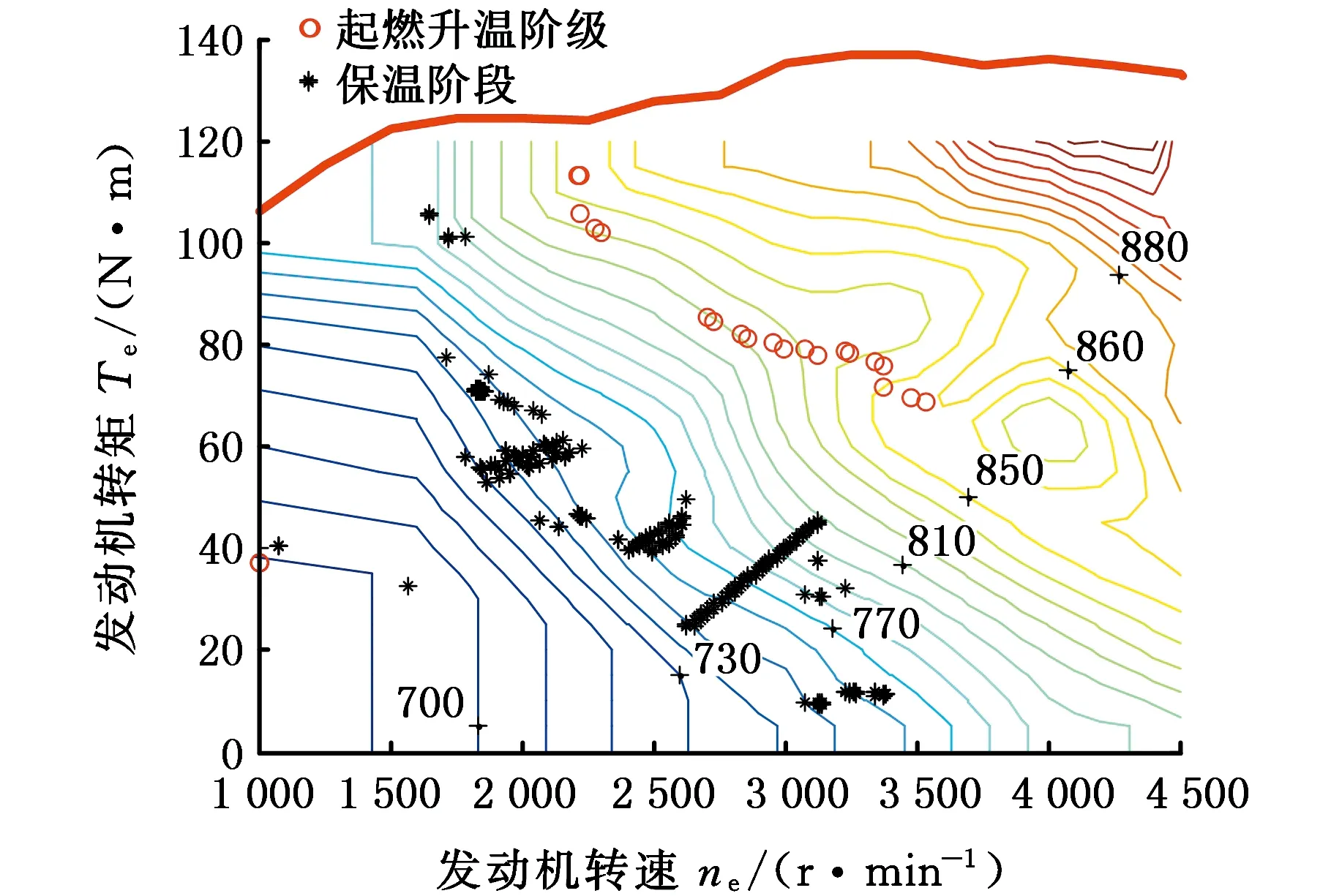
图12 不同阶段下发动机出口温度对比Fig.12 Comparison of engine outlet temperature at different stages
第一阶段为起燃升温阶段,此时SCR系统出口温度上升速率很快,起燃时间较短,整车工作模式多为行车充电模式(工作模式5)。图12所示为当前阶段发动机工作点在排气温度MAP图中的分布情况,可以看出,此时发动机温度较高,有利于SCR系统起燃。第二阶段为SCR系统出口温度保持阶段,此时SCR系统出口温度在373 ℃上下波动(图10),整车工作模式逐渐由行车充电模式过渡到其他驱动模式,见图11。此时发动机工作点也由高负荷降低到中等负荷,NOx转化效率维持在较高水平,发动机仅需在满足动力性足够的前提下,平衡油耗、NOx排放和PM排放的目标权值系数。
3.1 模式切换控制规则
对动态规划算法最优控制下发动机的工作状态进行描述,便可分析提取出车辆运行状态和发动机工作模式的对应关系,从而得到动力总成工作模式的切换规则。
图13和图14所示分别为插电式柴电混合动力汽车处于起燃升温阶段和SCR温度保持阶段时,发动机运行的状态点在等功率曲线下的分布情况。由图13可以看出,在起燃升温阶段发动机状态切换的临界线为4 kW,这表明当需求功率大于4 kW时发动机启动,此时的运行状态由功率分配曲线决定。同样,由图14可以看出,在保温阶段发动机状态切换的临界线为12 kW。

图13 SCR系统起燃升温阶段发动机工作状态Fig.13 The working state of the engine in SCR system light-off temperature stage

图14 SCR温度保持阶段发动机工作状态Fig.14 The working state of the engine in SCR temperature maintenance stage
3.2 能量分配控制规则
由上述模式切换规则确定发动机的工作状态后,仍需对动力总成的功率进行分配。本文根据车辆需求转矩分配比(torque split ratio, TSR)曲线(即发动机输出转矩与动力源总需求转矩之比)来确定发动机的转矩。
图15和图16分别为起燃升温和保温阶段的插电式柴电混合动力汽车的转矩分配插值曲线,采用幂函数拟合转矩分配规则,其表达式如下:
(20)
(21)
式中,RTS1、RTS2分别为起燃升温阶段和保温阶段的转矩分配比。

图15 SCR系统起燃升温阶段转矩分配控制策略Fig.15 Control strategy of torque distribution in SCR system light-off temperature stage

图16 SCR温度保持阶段转矩分配控制策略Fig.16 Control strategy of torque distribution in SCR temperature maintenance stage
3.3 CD-CS控制策略优化设计
基于上述所提取的整车工作切换规则和TSR规则,可制定基于动态规划结果的改进型CD-CS策略,见图17,需要指出的是,基于动态规划结果提取的规则只对CD阶段进行了改进。其中,Preg,max为当前转速下的最大制动回收功率,tlim为SCR系统起燃温度,SSOC,low为电池组最低SOC值,Pon,low为发动机最小启动功率。
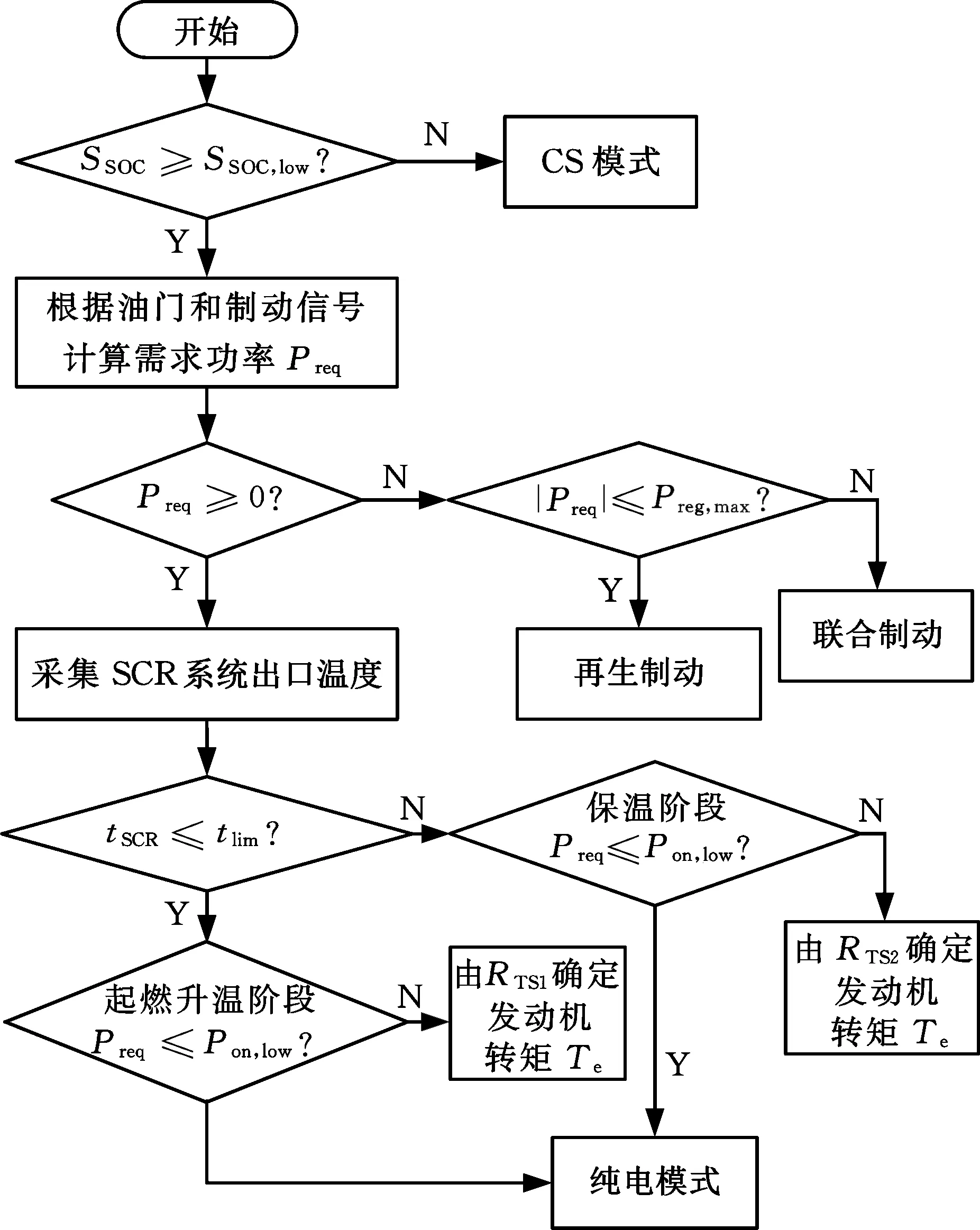
图17 基于动态规划结果的改进型CD-CS策略Fig.17 An improved CD-CS strategy based on DP results
4 控制策略验证
4.1 仿真验证
为验证所提出的基于动态规划算法的 CD-CS(DP-based CD-CS)规则控制策略的正确性,将仿真结果分别与初始CD-CS策略和动态规划(DP)算法优化结果进行对比。选择3个NEDC工况,电池SOC初值设为0.9,SCR催化层初始温度为20 ℃,仿真结果分别见图18和图19,可以看出,在起燃升温阶段,动态规划算法较DP-based CD-CS规则控制策略下的SCR温度上升较快,两者SCR出口处排放水平相当;在SCR温度保持阶段,动态规划算法和DP-based CD-CS两种策略下的SCR温度均达到并稳定在370 ℃,DP-based CD-CS规则控制策略较动态规划算法的NOx排放量降低了3.3%,两者的NOx排放量相差2.2%,该偏差在允许范围内。
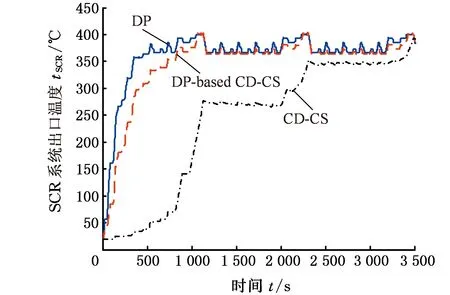
图18 三种策略中SCR系统出口温度变化对比Fig.18 Comparison of SCR system outlet temperature variation in three strategies

图19 三种策略中NOx排放量对比Fig.19 Comparison of NOx emissions in three strategies
表2所示为3种控制策略在3个NEDC工况下的结果对比。由表2可知,与初始CD-CS策略相比,采用DP-based CD-CS规则控制策略的油耗和NOx、PM排放量分别减少了4.95%、20.8%、6.06%,进一步验证了动态规划算法的可行性,这也表明所提控制规则可以用于优化初始CD-CS策略,从而降低油耗和排放指标。

表2 三种控制策略中仿真结果对比Tab.2 Comparison of simulation results under three control strategies
4.2 处理器在环测试

图20 处理器在环试验台Fig.20 Processor-in-loop test bench
为了验证DP-based CD-CS策略在目标整车控制器中运行的可行性和有效性,搭建了图20所示的处理器在环(PIL)试验台。利用dSPACE/Targetlink产品级代码生成工具,将MATLAB/Simulink/Stateflow环境下建立的控制策略编译成可执行文件,并下载至MPC5554目标控制器。控制器输出的整车车速、发动机电机扭矩等信号由VCU控制器与Targetlink系统中运行的整车模型利用基于FTDI芯片组的USB转串口线通信,并由DCI-CAN (USB-CAN转换器)和CalDesk软件组成的dSPACE标定系统对控制器中的参数进行标定。
图21所示为PIL试验与仿真过程中SCR系统出口温度变化的对比,可以看出,两种结果存在一定的偏差,但整体趋势一致。这是因为在进行Targetlink模型转换时忽略了一些瞬态过程及非线性过程。图22所示为PIL试验与仿真过程中NOx排放量的整体情况,可以看出,与仿真结果相比,试验得到的NOx排放量增大了1.6%。结合表2和图22可知,与初始CD-CS策略相比,试验得到的NOx排放量增大了18.2%。综上可知,所提基于动态规划算法的插电式柴电混合动力汽车规则控制可达到预期的结果。

图21 SCR系统出口温度结果对比Fig.21 Comparison of SCR system outlet temperature results
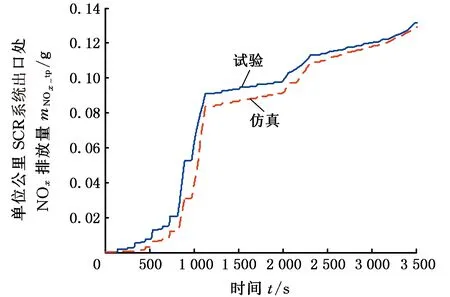
图22 NOx排放量结果对比Fig.22 Comparison of NOx emission results
5 结论
(1)基于准静态假设建立了包括发动机-ISG电机、电池、选择性催化还原系统及传动系统的整车动力学模型,并利用线性函数近似逼近油耗率MAP图来提高求解速度。
(2)以发动机油耗、催化器出口排放与其对应的加权系数乘积的加权和为目标函数进行求解,根据不同权重系数下的计算结果,提取满足国Ⅴ排放法规约束下最优控制解的典型特征,并在此基础上对CD-CS策略进行改进。
(3)仿真及处理器在环试验结果表明,与初始CD-CS策略相比,基于动态规划算法优化结果的改进后CD-CS策略节油4.95%,NOx排放量、PM排放量分别减少20.8%和6.06%。
