旋翼机航磁测量系统及其应用
2019-07-26邓瑞辉余恺
邓瑞辉 余恺
(第七一五研究所,杭州,310023)
传统的航空磁测,多数都是将磁测系统安装在有人机上,目前常见的应用为运输机、塞斯纳飞机、动力三角翼等。近年来,无人机磁法探测开始兴起,较成熟的无人航磁测量平台为彩虹3和无人氦气飞艇[1],目前这两种无人平台搭载航磁测量系统已经在物探领域多次成熟应用,但此无人机平台体积仍然相对较大。它们的优点是平台及技术均较成熟,机动灵活,非常适合中型矿区的航磁作业。但是在超低空作业、无起降场地的丘陵地带以及小面积作业区域上,大型无人航磁平台则显得力不从心。因此对于搭载在更小无人平台的航磁测量系统的需求迫在眉睫[2],尤其在范围小、疑存点多且地貌构造复杂、坡度落差大、旱地与水潭交接、泥滩与沼泽遍布的探测区域。这些地方船只无法开进,人力无法涉及。基于上述原因,我所自主研发了折叠式旋翼机航磁测量系统,它在复杂地貌环境下仍可实施磁法作业,并保证测量的连续性,提高工作效率,且探测时对仪器姿态、飞行速度与高度可控。该系统适用于考古、河道管线探测、未爆炸物搜寻等小面积航磁测量的场合。
1 系统组成
折叠式四旋翼无人机航磁测量系统基于多旋翼无人机的氦光泵航磁测量技术,系统具有多旋翼无人机的灵活便携性,对起降场地要求低,可自主规划航线测量和手动控制定点航磁测量,磁力仪系统具备硬件磁补偿功能。磁探杆具备遥控折叠收放功能,方便运输及起飞降落。搭载基于氦光泵磁力仪的四旋翼无人机航磁测量系统由相对独立的四部份组成:无人机、氦光泵磁力仪、数据传输、电源。系统整机示意图见图 1。四旋翼无人机航磁测量系统的磁探杆以及电机机臂为可折叠状态,方便运输且在飞行作业时保证磁力仪光泵探头的安全。电机机臂在运输状态时通过4个不脱出螺钉向下折叠,磁探杆通过手动方式水平折叠,减小整机的运输体积。折叠后的整机系统可以轻松装入普通SUV后箱及小型面包车中。

图1 系统整机示意图
1.1 无人机系统
整机折叠示意见图 2。折叠式旋翼机主要由无人机机身、飞控、遥控器、地面站视频监控模块、飞行数据地面监视平板电脑、锂电池等组成。地面站监视模块以第一人称视角将飞机前部拍摄的视频内容实时传输,以方便操控者了解飞行姿态及方位。飞行数据地面监视平板电脑包含飞行测控APP软件,操控者可以在平板电脑中依据谷歌实时地图或者已知的GPS坐标进行航线规划,然后通过平板电脑对折叠式旋翼机进行自主飞行控制,使之按照预定航线实现定速定高定向稳定飞行。当飞行至目标点时可以实现自主悬停、自主降落和手动切换遥控操作。飞机的实时方位信息可以显示在软件界面中,便于掌握飞机的实时位置信息。折叠式旋翼机具备失控自动返航功能,当它超出遥控器信号范围时会自动返航并降落在起飞点。

图2 整机折叠示意图

表1 无人机主要技术指标
1.2 氦光泵磁力仪系统
测量系统主要由四部份组成(见图3):氦光泵磁力仪、磁补偿器、磁法综合数据采集软件、GPS导航系统。氦光泵磁力仪由光泵探头和检测电路组成,其主要技术指标见表 2。光泵探头安装在可折叠的无磁探杆中。
1.3 磁补偿器
旋翼机的动力特性取决四个无刷电机。为使电机有足够大的扭矩以维持负载飞行,通常工作电流达16~50 A。由毕奥-萨伐尔定律可知,电机运行时其导线电流产生的磁场将严重干扰磁力仪正常工作[2]。为此,采用折叠方式收放光泵探头,并在正常飞行时,使光泵探头离机身1.4 m左右,最大限度减少飞机磁干扰,保证磁力仪有效稳定运行。即便如此,实测磁力仪平面八方位转向差仍在40 nT左右。因此,增加一手动磁补偿系统,在飞行作业前进行磁干扰补偿调整,将磁力仪平面八方位转向差控制在1.5 nT左右。摇摆和俯仰机动在1 nT左右。该磁补偿器设计为仅用于补偿由旋翼机引起的固定磁干扰项[3],减小旋翼机固定磁干扰对磁力仪工作的影响,使磁力仪工作性能得到最大程度发挥。图4为旋翼机航磁测量系统在某航向摇摆、俯仰机动的磁补偿效果示意图。图5为八方位磁补偿效果示意图。

图3 磁测系统组成框图

表2 磁力仪主要技术指标

图4 旋翼机航磁测量系统磁补偿效果示意图

图5 八方位磁补偿效果示意图
1.4 磁测综合数据采集软件
磁测综合数据采集软件包含磁法勘查测量系统(GMInfo)和磁力测试软件(GMlog)两个软件包。GMInfo安装于数据采集计算机中,集成磁力仪数据采集、显示,GPS导航和GPS数据采集,高度数据采集、显示;将采集的磁力仪数据、GPS数据、高度数据以文件的形式记录,供数据处理软件分析。GMlog专门针对航磁测量系统采集和噪声测试而设计,软件可实时采集和动态显示磁力仪仪器总场数据、总场梯度数据、GPS数据,并统计仪器噪声水平;支持数据浏览、绘图、打印等功能。
2 系统试验与应用
结合某已知滩涂污水管路由,使用折叠式旋翼机航磁测量系统探测测试。实测低空作业,四阶差分低空动态噪声为0.11 nT,如图6。按航磁测技术规范评价,系统动态噪声达到二级。

图6 旋翼机航磁测量系统低空动态噪声
作业照片见图7,该区域为滩涂地带,船只和人员均无法进入。无人机在滩涂上方低空飞行,实现了管道的覆盖式测量,作业平均飞行高度5 m。数据分析后,平面剖面图见图8。结合GPS位置信息和磁异常曲线图,可以清楚的估算出地下管路的位置走线,经与实际比对可知,测量值和实际一致。表3为关键点的磁异常值。经纬度为WGS84坐标,(对表3线1中经纬度的解析示例:2 959.825 645为纬度29°598 256 45″。12 141.012 39为经度121°410 123 9″)。

图7 折叠式旋翼机航磁测量系统在沼泽上空作业
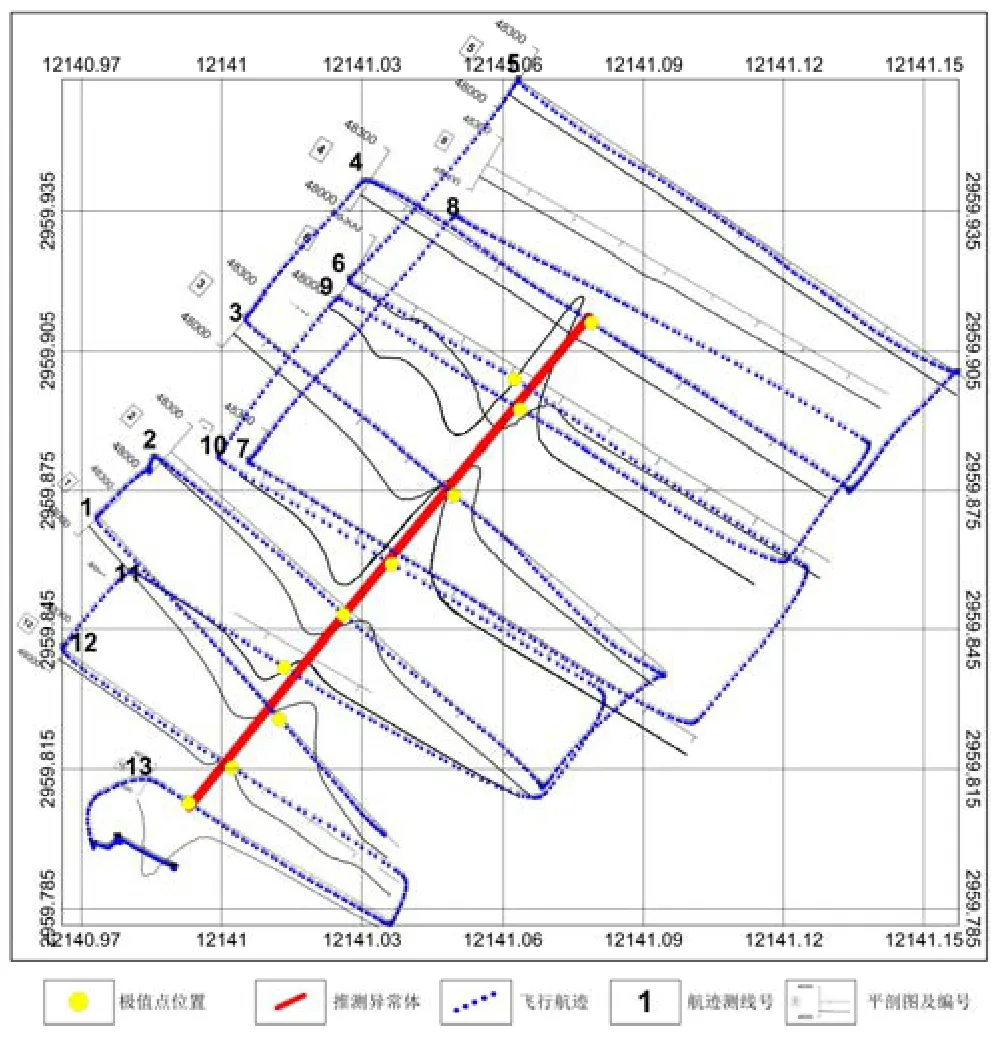
图8 某管线磁法探测的平面剖面图

表3 关键点的磁异常值
3 结论
本文介绍了旋翼无人机平台搭载氦光泵航磁测量系统的可行性,该系统结合了磁补偿和磁力仪的电动收放装置,在行业内属于首次创新应用。
系统在滩涂结合水管路由的成功探测试验,证明了其可行性及有效性,填补了小区域复杂地貌环境下氦光泵磁法探测的空白,提高磁法作业的效率,降低工作成本。后续研究的重点是提高旋翼机的有效续航时间,在电机功率不变的情况下,通过机械的磁屏蔽措施进一步减小电机的磁干扰,再对磁力仪系统进行减重优化设计,以期让整个系统更加稳定可靠。
