上肢康复机器人主动康复训练控制策略*
2019-07-26葛小青赵佳欣
刘 鹏,葛小青,李 宇†,赵佳欣
(1 中国科学院遥感与数字地球研究所, 北京 100094; 2 中国科学院大学, 北京 100049; 3 东北大学机械工程与自动化学院, 沈阳 110819)
康复机器人的研究一直是机器人领域的一个重要话题,由于这是一个多学科交叉的领域,国内外许多研究者都对康复机器人的不同方面展开了研究,其中包括针对康复机器人训练过程的控制策略。从控制效果来分,可以将其分为被动康复训练控制与主动康复训练控制。被动康复训练是指康复机器人带动人体手臂进行康复训练的方式;主动训练指的是人体手臂发力,康复机器人提供辅助或阻力的训练方式[1]。
与外骨骼助力系统的控制不同,康复机器人的运动控制对接触力的要求更为严格。对于进行康复治疗的患者来说,接触力的施加方式会影响到康复的效果。对此,亚利桑那州立大学、哈佛大学等对康复机器人的训练控制进行了相关研究,其中的大多数学者侧重于对设计的机构本体进行运动补偿,他们将康复机器人的运动机构分别进行,由局部控制到整体控制。Huang等[2]利用气动人工肌肉开发手臂康复装置,能实现在肩、肘、腕共有4个自由度的康复运动,该装置只能为患者提供被动的上肢康复运动,非常经济适用而且方便在家庭环境进行康复训练,如今该团队的上肢康复机器人已经进行到第4代。文献[3]设计出一款基于鲍登线驱动的上肢可穿戴外骨骼,但由于鲍登线本身存在摩擦并且有延时驱动的缺点,该文献提出一种新的控制方案——分层控制来解决这个问题,通过这个方法实现肘关节的助力。分层控制方案主要分为3层:上层、中层、底层。上层是一个主动阻抗控制用来识别穿戴者意图,中层用来补偿鲍登线的延时,底层用来补偿鲍登线内部的摩擦力。
中国的哈尔滨工业大学、东南大学、浙江大学、华中科技大学等高校也对康复机器人的训练方式展开研究,其中大部分研究的方向侧重于对运动算法的设计与验证。文献[4]针对7自由度康复机械臂设计自适应阻抗控制策略,在理论上证明比传统阻抗控制能取得更好的效果。文献[5]提出基于模糊逻辑的实时在线安全监测控制方法,提取相关运动特征,评估受训患肢状态稳定情况,安全监控模糊控制器能实现正常扰动情况下的控制期望力调节以及突发情况下的紧急响应,通过基于位置的阻抗控制策略实现患肢与机器人末端的柔顺性。文献[6]对被动控制策略和半主动控制策略展开研究。通过分析人体上肢神经肌肉运动及感知机理,建立人体上肢神经肌肉及各关节的运动模型。提出主从机械手欠运动自由度匹配方法,改善主从异构机械手在运动奇异点、关节运动极限点等运动空间的控制性能,实现柔性外骨骼与从机械手之间的运动协调。文献[7]气动人工肌肉采用拮抗肌对的方式实现单关节的双向运动,即每个关节的双向运动都需要同时控制两根气动人工肌肉来实现,提出一种伴随状态树的方法以消除结点能量的线性相关性,避免类内离散度矩阵奇异问题。在采集4路手臂肌电信号的基础上,选取结点能量作为运动意图特征,实现基于主动运动意图的人上肢康复机器人交互控制,并验证算法的实用性。
本文通过对国内外康复机器人的设计与控制策略的研究,设计一款气动人工肌肉驱动的上肢康复机器人,并设计两种不同的主动康复训练策略。
康复机器人领域对安全性的要求较高,与传统电机驱动的康复机器人相比,气动人工肌肉作为新型驱动器具有较高的安全性及良好的柔顺性正受到研究者的青睐,但由于气动肌肉存在非线性与迟滞等缺点是阻碍其推广的瓶颈,从而寻找一种可靠的控制方法是一项亟待解决的技术难题。本文将直接力控制与阻抗控制应用于气动人工肌肉的驱动,得到较好的实验效果。
1 康复机器人硬件平台设计
上肢康复机器人的设计主要包含4部分:手臂部件的结构设计、肩部结构设计、背部支架设计和腰部托架的设计。其中手臂部件包括肩关节、上臂、前臂、手部托架、肘部气动人工肌肉驱动器、腕部气动人工肌肉驱动器;肩部由两块能相对转动的弧形板组成;背部支架包括两块背部横梁,主要起支撑、固定与连接作用;腰部支架主要由两部分末端有弧度的钣金件构成,起到固定与连接的作用。康复机器人概图如图1所示[2,8-11]。最终的实验样机如图2所示。

图1 上肢康复机器人概图Fig.1 Schematic of robot

图2 上肢康复机器人实物图Fig.2 Overview of the rehabilitative robot
2 上肢康复机器人性能
上肢康复机器人不仅能用于单个手臂的康复训练,还能用于双臂的康复训练。而且大部分结构采用铝合金材质,重量轻、方便拆卸,不仅能满足医疗机构对康复训练的要求,对于移动不便的患者还能在家庭环境中进行康复训练。上肢康复机器人的性能指标如表1所示。
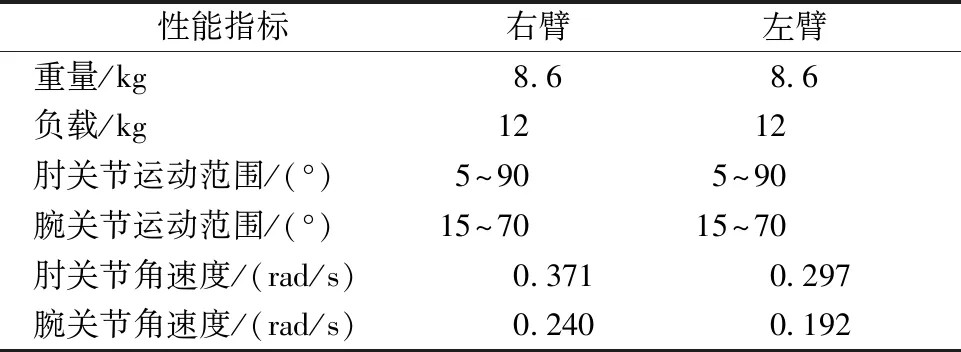
表1 康复机器人性能指标Table 1 Performance index of the rehabilitation robot
双臂康复机器人的运动范围如图3所示,从图中可以看出双臂康复机器人的运动范围肘关节的有效行程为5°~90°,腕关节的有效行程为15°~70°。左臂、右臂的负载力均为12 kg,成年人体的手臂重量为4~6 kg,满足负载要求。左臂与右臂的关节在2 bar气压下的运动速度为:右臂肘关节0.371 rad/s,右臂腕关节0.240 rad/s,左臂肘关节0.297 rad/s,左臂腕关节0.192 rad/s。

图3 康复机器人充气状态Fig.3 Inflatable state of the rehabilitation robot
3 上肢康复机器人主动康复训练
在患者手臂康复中期,患者手臂恢复了部分机能,有一定的自行抬起手臂的能力。此时,采取以康复机器人为辅、人手臂为主的康复训练模式。简而言之,康复机器人在此阶段的训练中只起辅助运动或增加阻力的功能。将这种康复训练模式称为主动康复训练模式,患者的手臂康复训练对接触力有一定的要求,而且接触力对机器人的运动轨迹有影响,他们之间的相互作用关系对康复训练的效果有很大影响。
3.1 康复机器人直接力控制
患者穿戴上手臂进行康复训练,这种训练模式可以让患者对接触力的大小有直观的感受。人和康复机器人在运动过程中将机器人等效成外界环境,那么人体手臂对环境产生力,这个力的大小对患者来说十分重要,会直接影响患者使用的舒适程度。在这种直接力控制的方式中,期望机器人跟随人体手臂的运动,给予患者以微小阻力的形式。因此,采用力传感器测量人施加在机器人的作用力,并设计控制器根据这个力的大小控制机器人的运动,从而使得人对机器人的作用力保持在较小的范围内[12-13]。根据控制要求,可以得到人机交互模型的控制原理图,如图4所示。

图4 康复机器人的直接力控制原理图Fig.4 Schematic of mechanical arm direct force control
不考虑其他力矩的干扰,得到人机交互模型的动力学模型
(1)
合外力矩表示成驱动器对康复机器人施加的力矩Ta加上人对机器人施加的力矩Tr;其中人对康复机器人施加的力矩Tr可以表示成
Tr=J(θ)Tfe.
(2)
式中:J(θ)为机器人的雅克比矩阵,fe为在操作空间中人作用于康复机器人的力。
设计的控制律为
(3)

基于比例控制设计为
τ=Kffe.
(4)
式中:fe为接触力,可以由多维力/力矩传感器(或其他压力传感器)测得。将式(3)、式(4)代入(1)可以得到
(5)
3.2 康复机器人的阻抗控制
这种算法可以从两个角度去理解。一方面,将位置上的误差认为是产生力的原因,用这种方式设计的控制器认为是阻抗控制器,从这个角度来看实质是将出现的位置误差转化为力误差,将力误差信号导入控制器中,从而通过修正后的力去消除位置误差,实现位置控制[14];从另一方面,认为力误差是产生位置误差的原因,从这个因果关系来看,用这种关系设计的控制器认为是导纳控制器,这种控制方式将接触的力误差转化为位置修正量,从而修正期望位置,实现力控制[15]。两种方式具有结构和控制效果上的对偶性,都能处理上肢康复机器人,无论哪种方式设计的控制器都需要将接触力信息作为控制量输入到控制系统中,实现机器人对环境的顺应,达到理想的柔顺控制效果。
我们基于第一种思想设计了康复机器人的控制律,阻抗控制的原理如图5所示。

图5 阻抗控制原理图Fig.5 Schematic of impendence control
康复机器人在康复训练过程中,对力的控制优先等级大于对位置控制的优先等级。这种控制方式是基于力的阻抗控制。根据机器人末端位置和机器人与环境(人对机器人作用力)作用力之间的关系,通过调整反馈的位置误差、速度误差或刚度达到控制力的目的[16]。
机器人的动力学方程是一个二阶微分的形式,所以目标阻抗也选用一个线性二阶系统
(6)
式中:M、B、K分别表示机器人的目标惯性、目标阻尼、目标刚度矩阵。dx表示机器人目标位置与当前位置之间的位移。
当人与机器人发生接触时,手臂的动力学方程可以表示为
(7)
得到控制律为
(8)
4 实验结果分析
4.1 直接力控制实验
实验平台如图6所示,薄膜压力传感器安装在康复机器人末端处绷带上下两侧,当患者进行康复训练时,与患者手部上下有接触,用于检测力的大小与方向,每个手臂由4个电磁阀控制充放气,其中2个控制充气,另外2个控制放气。当人体手臂向上运动时,P1大于P2,压力向上,气动人工肌肉根据力的大小转换成PWM信号值,控制电磁阀的开合,实现充气,手臂向上抬起;当P2大于P1,压力向下,控制另一组电磁阀的开合,人工肌肉放气,手臂向下运动。实验流程如图7所示。程序采用周期循环的模式,采样周期为0.001 s,为了处理数据方便,定义P=P1-P2,当P大于0.1时,说明力的方向向上;当P小于-0.1时,说明力的方向向下。当力的方向向上时,根据力的大小转化成PWM信号,控制气动人工肌肉的充气;当力的方向向下时,根据力的大小转化成PWM信号,控制气动人工肌肉放气。
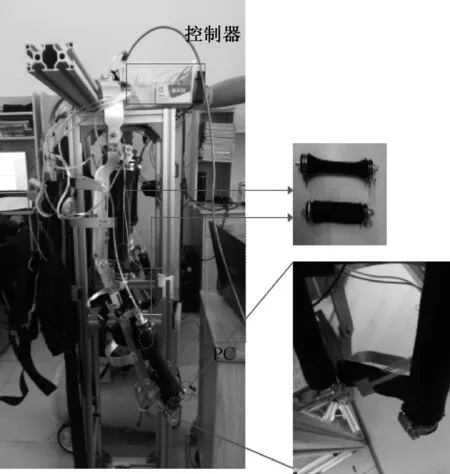
图6 实验平台示意图Fig.6 Schematic of experimental platform

图7 实验流程图Fig.7 Experimental flow chart
实验效果如图8所示,在进行康复训练时,手臂向上或向下运动,康复机器人给穿戴者提供阻力。薄膜压力传感器的读数P如图9所示。
从图9可以看出,实验者在手臂穿戴上康复机器人进行训练时,图中由于力的正负转变2次,说明实验者进行了2次抬起、放下的动作,即2个周期的康复训练。在第1个周期内,阻力的绝对值大小在1 N之内;第2个周期内阻力的绝对大小在1~1.5 N之间。与用电机作为驱动器的康复机器人相比,由于气动肌肉存在迟滞,在一定程度上减小了力的突变,力的变化速率较小,让患者有更舒适的训练。
4.2 阻抗控制实验
阻抗实验如图10所示,同样地,当手臂在进行康复训练时,随机地在某个时间段内加入一障碍物,测试康复机器人的性能。
薄膜压力传感器的读数P如图11所示。康复机器人的设定的轨迹为正弦运动轨迹。当没有障碍物时,此时的康复训练类似于被动康复训练,以跟踪轨迹为目的。康复机器人按系统设定的轨迹进行运动。

图8 穿戴实验图Fig.8 Wear experimental diagram of the right arm
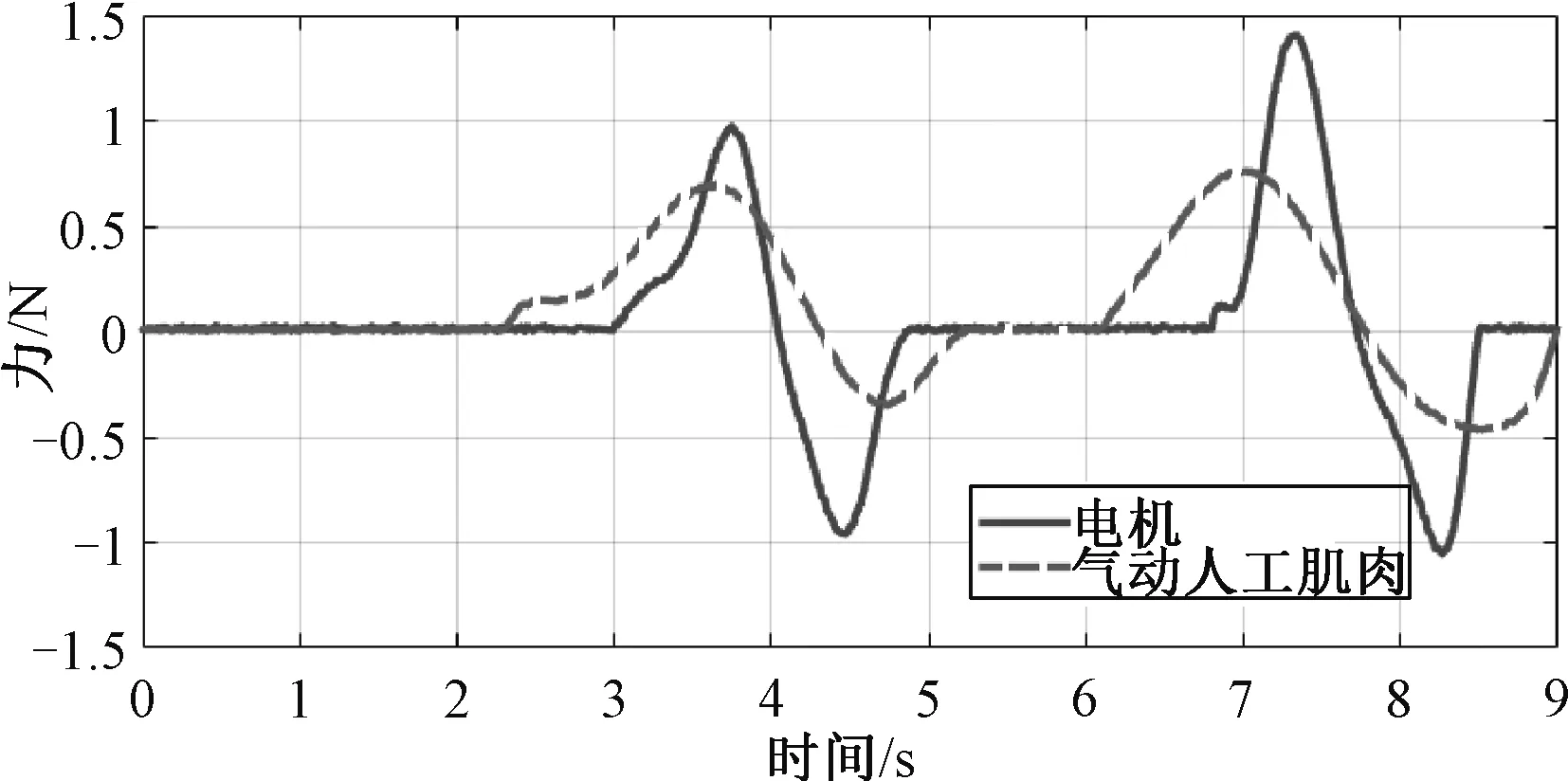
图9 薄膜压力传感器数值Fig.9 Numerical values of the film pressure sensor
阻抗控制算法大多数应用于电机驱动的康复机器人,而气动肌肉驱动的康复机器人由于本身的迟滞让患者与机器人的接触力更稳定,为了比较两个驱动器在阻抗控制算法的效果,让康复机器人辅助患者进行以某一恒力进行训练,将系统的接触力设定为1 N。分别将阻抗控制算法应用于电机驱动与气动人工肌肉驱动的康复机器人,从图11可以发现,阻抗控制算法在气动人工肌肉中驱动的康复机器人表现更稳定,从而保证了康复训练的舒适性。与电机控制的康复机器人相比,阻抗控制在气动人工肌肉驱动器的条件下能达到更好的实验效果。

图10 阻抗实验Fig.10 Impedance control trial
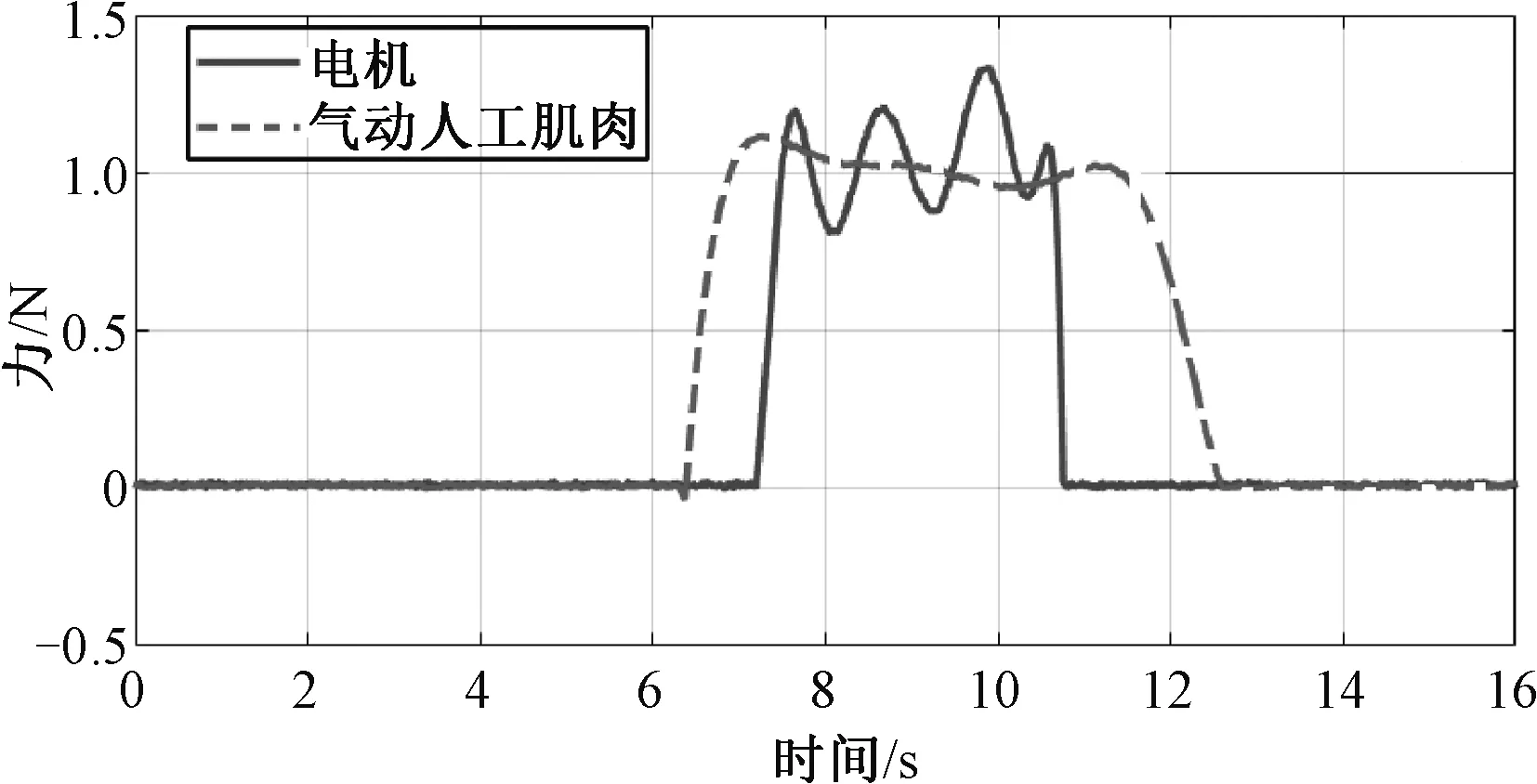
图11 左臂薄膜压力传感器的读数Fig.11 The readings on the left arm membrane pressure sensor
5 总结
本文所设计的4自由度上肢康复机器人,结构合理、质量较轻、穿戴方便,将气动人工肌肉作为驱动器,提高了系统的安全性;康复机器人移动方便,适用于在各种室内场合进行康复训练。通过对主动康复训练的研究,采用直接力控制及阻抗控制算法设计两种康复训练模式,并进行相关实验分析,两种训练方式均产生预期的实验结果,验证了主动康复训练的效果。
