无人机影像光谱和纹理融合信息估算马铃薯叶片叶绿素含量
2019-07-23冯海宽李长春杨贵军杨钧森杨文攀刘帅兵
陈 鹏,冯海宽,李长春,杨贵军,杨钧森,5,杨文攀,刘帅兵
无人机影像光谱和纹理融合信息估算马铃薯叶片叶绿素含量
陈 鹏1,2,3,4,冯海宽1,2,3※,李长春4,杨贵军1,2,3,杨钧森1,2,3,5,杨文攀1,2,3,4,刘帅兵1,2,3,4
(1. 农业部农业遥感机理与定量遥感重点实验室,北京农业信息技术研究中心,北京 100097;2. 国家农业信息化工程技术研究中心,北京 100097;3. 北京市农业物联网工程技术研究中心,北京 100097;4. 河南理工大学测绘与国土信息工程学院,焦作 454000;5. 辽宁工程技术大学测绘与地理科学学院,阜新 123000)
利用无人机平台搭载多光谱传感器在农业监测上已经有一些应用,但是利用无人机多光谱影像估算作物叶绿素含量的研究较少,特别是融合无人机多光谱影像光谱信息和纹理信息估算马铃薯叶绿素含量的研究更是罕见。基于此,该文利用2018年北京小汤山基地马铃薯各个典型生育期的无人机多光谱影像及实测的叶绿素含量数据,首先提取多光谱影像植被指数和纹理特征等变量,然后分析其与叶绿素含量相关性,筛选出较优特征变量,并开展基于调整2和折交叉验证的全子集分析估算马铃薯叶绿素含量。最后将植被指数与纹理特征通过主成分融合构建一种新的综合指标估算叶绿素含量。研究发现:1)多光谱植被指数和纹理特征估算叶绿素含量模型,折交叉验证均优于调整2;2)整个生育期,综合指标模型决定系数比植被指数模型、纹理特征模型均有提升,且标准均方根误差均降低。综合指标估算模型较优,多光谱植被指数模型次之,纹理特征模型较差。该研究可为马铃薯生长营养监测提供一种可行的方法,对马铃薯的栽培种植管理具有指导意义。
无人机;农作物;遥感;马铃薯;叶绿素含量;多光谱;纹理特征;最优子集分析
0 引 言
叶绿素含量的状况是指示植物光合作用、受营养胁迫及生长阶段的重要因子[1]。故可借助测定叶绿素含量的方法确定植被的营养状况。目前,主要通过室内高效液相色谱法、原子吸收法以及分光光度计法、SPAD叶绿素仪和基于特征光谱等等多角度多层次诊断叶绿素含量。这也决定了田间采样不具备时效性,采集样本数量有限,步骤繁琐。随着现代农业的高速发展,农业逐渐成为遥感的重要领域,由于无人机具有快速、无损、高通量以及较高的时空分辨率的特点使得农业向定量精细化迈入[2-4]。
Borhan等[5]通过R、G、B、550、770和880 nm的6通道多光谱系统采集马铃薯光谱信息,验证了多光谱波段特征与马铃薯的叶片叶绿素具有高达0.95的线性相关性。王伟等[6]利用多元线性回归(MLR)方法对冬小麦叶绿素含量进行了估算。刘豪杰等[7]以多品种拔节期玉米为研究对象,分析了植被指数与冠层叶绿素之间的关系,最后建立了通用型的叶绿素含量估算模型。陈君颖等[8]分析了叶绿素含量与光谱之间的特性,发现水稻叶片光谱反射率的一阶微分参数与叶绿素含量具有较强的相关性。
目前,随着大数据的发展,相关数据分析算法也被广泛地应用于农业定量遥感方面。冯海宽等[9]通过分析叶绿素含量和苹果叶片的原始光谱及其变换形式之间相关性,利用随机森林、人工神经网络和支持向量机回归等算法建模和验证,结果表明基于随机森林算法的模型反演叶绿素含量效果最好。王娣[10]利用筛选出的植被指数、端元特征和纹理特征等因子,采用“留一法”交叉检验分别用逐步线性回归、BP神经网络和随机森林算法建模,表明植被指数基于上述3种研究方法建模效果最好。李长春等[11]基大豆育种小区实测叶面积构建逐步回归、全子集分析、偏最小二乘回归、支持向量机和随机森林等模型,筛选出估测叶面积指数最优模型。
前人大多利用单类型遥感变量研究植被理化参数的统计学估算[12-14],而纹理特征多用于森林结构估算模型,少数用于农业理化参数估算中[15-17]。传统无人机遥感大多从光谱植被指数入手进行作物营养监测,忽略了其他信息,如图像本身的特征信息等。由于无人机多光谱影像兼有地物的多光谱信息和纹理信息的优势,本文分别从多光谱植被指数、纹理特征以及将二者融合构建综合指标分别估算马铃薯叶绿素含量,以期为叶绿素定量估算提供了一种新方法,实现低成本、快速、高通量地监测马铃薯的生长状况与营养信息,为农田灌溉、变量施肥等精细化管理提供保障。
1 材料与方法
1.1 试验材料与设计
试验于2018年3月到7月在北京市昌平区小汤山镇国家精准农业研究示范基地开展。该区域位于小汤山镇(北纬40°10′44″,东经116°24′00″)东部,平均海拔为36 m,为北温带半湿润大陆性季风气候,夏季高温多雨,冬季寒冷干燥,春、秋天较短。平均全年无霜期180 d。研究区共设密度试验(N区)和氮素试验(S区)2个试验区,采用完全随机试验设计,每个试验品种设2个水平,均为早熟品种。密度试验设3个水平:63 000株/hm2(T1)、72 000株/hm2(T2)、81 000株/hm2(T3),品种分别为中薯3和中薯5,6个处理,每个处理3个重复,共18个试验小区;氮素试验设4个水平:每公顷0 kg尿素(N0)、每公顷163.05 kg尿素(N1)、每公顷326.10 kg尿素(N2,正常处理,150 kg纯氮)、每公顷489.15 kg尿素(N3),品种分别为中薯5和中薯195,8个处理,每个处理3个重复,共24个试验小区;小区东西总长39.6 m,南北总长45 m(不包括保护行),试验小区共42个,小区面积是5 m×6.6 m。种植方式为覆膜种植,田间管理包括:除草,培土,浇水。施肥分为施底肥和追肥。无人机遥感数据获取试验与田间数据获取和采样同步进行,获取生育期分别为现蕾期(2018年5月15日)、块茎形成期(2018年5月29日)、块茎增长期(2018年6月5日)、淀粉积累期(2018年6月19日)和成熟期(2018年6月29日)等5个典型生育期。
1.2 无人机遥感数据获取与预处理
以八旋翼电动无人机为载荷平台(无人机质量4 kg,最大载质量6 kg,飞行时间20 min,飞行高度20 m),搭载高清数码相机和多光谱相机开展无人机遥感数据获取。选择在太阳光辐射强度稳定,天空晴朗无云的时段进行无人机数据的采集。在获取无人机影像前,在测区内布置地面黑白布,用于多光谱影像的辐射校正。无人机平台见图1和相机参数如表1。

图1 无人机平台

表1 多光谱相机参数
利用Agisoft Photoscan和Pix4Dmapper,对无人机的多光谱影像进行拼接。它们是以运动结构(structure from motion,SFM)为核心算法,即从运动信息中恢复三维场景结构。基本流程是首先进行筛片(筛选航带内的航片),把数码和多光谱及传感器的POS数据进行匹配与对齐,进行马铃薯特征点的提取与匹配,使相机位置参数得以优化并获取稀疏点云;然后通过改进的位置参数建立相应的密集点云,再重建表面的3D网格;最后生成该试验区的正射影像图。
1.3 马铃薯叶绿素含量测定
将每个小区选取的植株样品筛选出6片典型马铃薯叶片,用直径为0.8 cm的打孔器取12片小样品,为避免因水分散失引起误差,回到室内立即用精度为0.001 g的天平秤样品质量,样品质量0.2 g左右。样品称质量后放入装有80 mL、质量分数为95%乙醇浸提液的刻度试管中,然后将试管置于黑暗中,每天摇动一次,直至叶片变白(3~7 d)后用分光光度计测定乙醇溶液在可见光440、655、649 nm处的吸光度值OD并利用Lichtenthaler[18]中的方法计算叶绿素的含量,见公式(1)。

式中CHL为叶绿素含量,g/cm2;OD655和OD649分别为可见光波段655和649 nm处的吸光度值;为95%乙醇浸提液的体积,mL;为叶片样品面积,dm2。整个生育期马铃薯叶绿素含量的箱线图如图2。

注:D0515为5月15日现蕾期,D0529为5月29日块茎形成期,D0605为6月5日块茎增长期,D0619为6月19日淀粉积累期,D0629为6月29日成熟期。
Note: D0515 is the bud period on May 15, D0529 is the tuber formation period on May 29, D0605 is the tuber growth period on June 5, D0619 is the starch accumulation period on June 19,D0629 is the maturity period on June 29 .
图2 整个生育期马铃薯叶片叶绿素含量的箱线图
Fig.2 Box plot of chlorophyll content in potato leaf for each growth period
1.4 多光谱辐射定标和多光谱植被指数选取
1.4.1 多光谱辐射定标
基于外场定标的方法完成多光谱图像的辐射定标,即将马铃薯多光谱的值转化为马铃薯的反射率信息。在田间放置2块黑白定标布,再用ASD光谱仪垂直获取它们的光谱反射率信息。同时,用ENVI获得多光谱中黑白布的值(取距离黑白布边缘2/3处的像元部分),如图3所示。利用式(2)完成DN值到反射率的转换。

式中和为地物的反射率和值;1、2、1和2为黑白布的反射率和值。
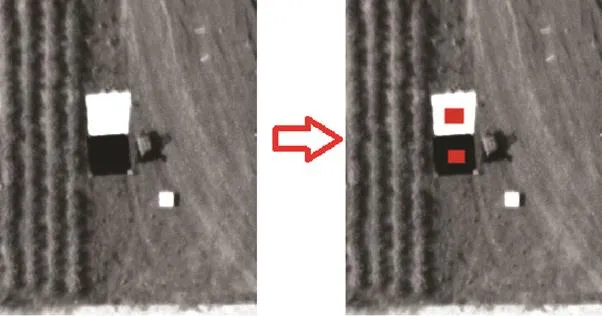
注:取距离黑白布边缘2/3处的像元部分。
Note: Taking the pixel part 2/3 from the edge of black and white cloth.
图3 获取多光谱黑白布值
Fig.3 Multi-spectral black and white clothvalue
1.4.2 多光谱植被指数选取
依据已有的多光谱植被指数,并结合多光谱影像特征,选择与叶绿素有关的多光谱植被指数,如表2所示。
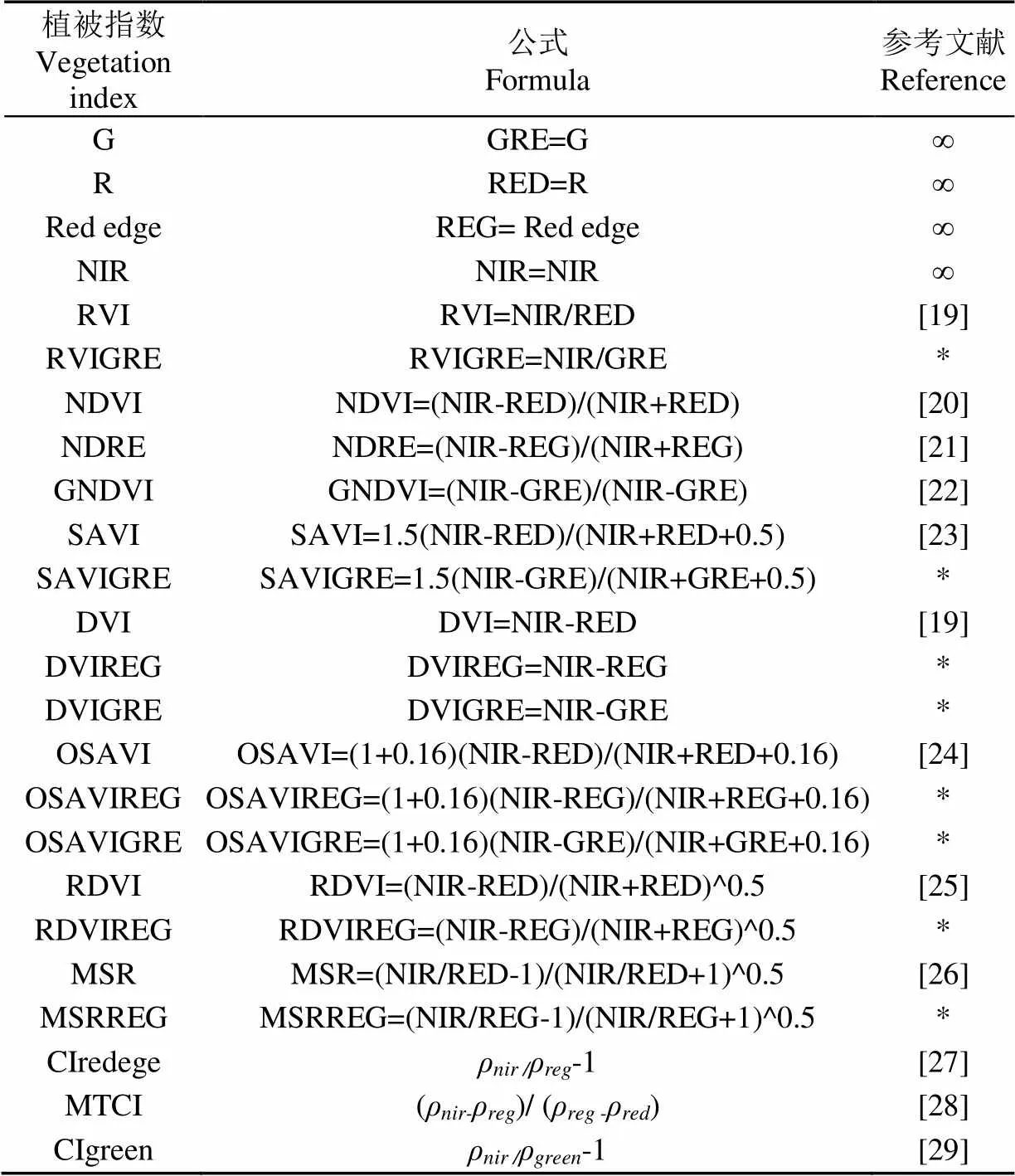
表2 多光谱植被指数
注:“∞”为经验多光谱变量;“*”表示据红波段信息提出的红边、绿波段信息多光谱指数。
Note: “∞” is an empirical multi-spectral variable; “*” means red-and-green-band information multi-spectral index based on red-band information.
1.5 多光谱纹理特征提取
多光谱数据包含地物的多光谱信息、纹理信息以及结构信息[30-32]。纹理(texture)即图像中含有强或弱规律性的相似图形,它是一种常见的视觉现象——重复出现在图像上的局部结构或排列规则[17]。有关区域纹理分析的方法大致从频谱分析、结构化纹理分析及统计方法三方面入手[33]。目前,主要频谱分析有傅里叶滤波、空间域滤波和小波分析;统计方法则通过分析纹理的数字特征来实现,主要包括灰度分布统计量、局域自相关函数、灰度游程及灰度共生矩阵等特征[34]。
通过基于二阶概率统计滤波的方式来实现图像纹理特征的提取,二阶概率统计通过2个相邻的特定距离和方向的窗口,统计像元在窗口中的频率,最终,借助一个显示2个像元和其特定邻域之间发生数的相对频率矩阵来完成纹理特征值的计算[35]。本文通过ENVI来实现图像纹理特征的提取,每个波段有8个二阶概率矩阵的纹理特征值:均值、方差、协同性、对比度、相异性、信息熵、二阶矩及相关性。由于Parrot Sequoia 相机有4个光谱通道,因此在各个生育期可提取32个纹理信息。利用Arcgis软件对研究小区绘制矢量文件,并赋予属性编号,然后在IDL中对每一个小区矢量文件和原始影像进行读取,获取每个小区平均光谱信息和纹理特征信息。
1.6 研究方法
1.6.1 调整2与全子集回归
对于多元回归,即使模型添加一个不显著的自变量,而它的2也会变大。因为残差平方和随着自变量的加入而减少,从而引起了过拟合,易导致数据丢失偶然变异性。而调整2(2adj)既考虑了样本个数也加入了自变量个数的影响。因此2adj比2估计更为真实。全子集回归即对特征组合全部进行建模分析,再选择最优。
本研究以调整2(2adj)为特征选择依据对全子集回归进行较优模型筛选。
1.6.2折交叉验证
交叉验证不受限于具体模型对于检验模型偏差和方差具有普适性,适用于样本集不大的情况。这里采用折交叉验证法,它比留一交叉验证(LOOCV)计算次数少,因此训练的样本相对少点。
本研究在全子集回归基础上,取10折交叉模型偏差最小为依据与上述调整2(2adj)的全子集模型形成对比筛选。
1.6.3 PCA主成分分析
主成分分析(PCA),即用少量特征描述样本以降低特征的空间维数,本质上为变换。现实中,为能准确刻画研究问题,往往选择多个变量,变量一定程度上多多少少的表达相关信息。但变量间又不完全独立,因此会由于共线性而导致信息重叠,而掩盖信息特征。通过利用PCA对原始特征进行提取,转化为互不相关又能代表性表述原始信息的主成分来使复杂信息“简单化”,即因子降维。
本文对与叶绿素含量极显著相关的植被指数和纹理特征进行PCA融合提取相应主成分进行建模与验证。
1.6.4 模型评价指标
在42个试验小区中,选取样本总量的2/3即28个作为建模样本,1/3即14个作为验证样本。基于2adj全子集分析模型和基于10折交叉验证的全子集分析模型,拟定决定系数(coefficient of determination,2),均方根误差(root mean squared error,RMSE)和标准均方根误差(normalized root mean squared error,NRMSE)作为模型精度的评价指标[33],筛选出以多光谱植被指数、纹理特征、综合VI和Texture的优良叶绿素含量模型。
本文基于无人机多光谱数据与马铃薯叶绿素含量,在现蕾期、块茎形成期、块茎增长期和淀粉积累期4期进行马铃薯叶绿素含量定量估算研究,技术流程如图4所示。

图4 无人机多光谱数据马铃薯叶片叶绿素含量估算技术流程
2 结果与分析
2.1 光谱特征与叶绿素含量相关性分析
2.1.1 多光谱植被指数与LCC相关性分析
针对于各个生育期,通过表2构建相应的多光谱植被指数,与叶绿素含量(leaf chlorophyll content , LCC)进行相关性分析。现蕾期和块茎形成期相关性分析结果见图5a和5b,后三期图略。由图5a可知,现蕾期,NIR、MTCI、CIG、RVIGRE、GNDVI、DVI、DVIREG、DVIGRE、RDVIREG、SAVIGRE与LCC的相关系数绝对值在0.65~0.72之间,均达到极显著水平(<0.01);由图5b可知,块茎形成期,与LCC相关性绝对值前10的植被指数NDVI、RVI、CIR、SAVI、RVIREG、SAVIGRE、OSAVI、RDVI、MSR、MSRREG在0.57~0.65之间,达到极显著水平(<0.01);增长期,G、NDVI、CIG、RVIGRE、GNDVI、SAVIGRE、DVIGRE、OSAVI、OSAVIGRE、MSR前10个植被指数与LCC相关性绝对值在0.44~0.61之间,均达到极显著水平(<0.01);淀粉积累期,G、R、NDVI、CIG、RVIGRE、GNDVI、SAVIGRE、DVIGRE、OSAVIGRE、MSR前10个指数作为模型自变量,均达到极显著水平(<0.01);成熟期,G、R、CIR、NDRE、RVIREG、SAVIREG、DVIREG、OSAVIREG、RDVIREG、MSRREG与LCC的相关系数绝对值在0.56~0.65之间,达到极显著水平(<0.01)。

注:图中数字表示相关系数,数字越趋于1,相关性越高,下同。
Note: Numbers in the figure indicate the correlation coefficient. The more the digital tends to 1, the higher the correlation, the same as below.
图5 马铃薯现蕾期和块茎形成期植被指数相关系数矩阵图
Fig.5 Matrix diagram of correlation coefficient of vegetation index in bud period and tuber formation period of potato
2.1.2 多光谱纹理特征与LCC相关性分析
分析马铃薯全生育期多光谱数据的纹理特征值与叶绿素含量的相关性,现蕾期和块茎形成期的结果见图6a和6b,后3个生育期图略。由图6a可知,现蕾期,Mean_B1、Variance_B1、Homogeneity_B1、Contrast_B1、Dissimilarity_B1、Mean_B3、Mean_B4与LCC的相关系数绝对值在0.4~0.72之间,达到极显著水平(<0.01);由图6b可知,块茎形成期,Mean_B2、Variance_B2、Correlation_B2、Mean_B3、Variance_B3、Homogeneity_B3、Contrast_B3、Dissimilarity_B3、Entropy_B3、Second Moment_B3前10个纹理特征与LCC相关性绝对值在0.41~0.51之间,达到极显著水平(<0.01);块茎增长期,Mean_B1、Variance_B1、Homogeneity_B1、Contrast_B1、Dissimilarity_B1、Entropy_B1、Second Moment_B1、Mean_B2前8个纹理特征值与LCC的相关性达到极显著水平(<0.01);淀粉积累期, Mean_B1、Variance_B1、Homogeneity_B1、Contrast_B1、Dissimilarity_B1、Entropy_B1、Second Moment_B1、Homogeneity_B2、Entropy_B2、Second Moment_B2前10个纹理特征与LCC的相关系数绝对值在0.58~0.74之间,达到极显著水平(<0.01);成熟期, Mean_B1、Mean_B2、Entropy_B2、Second Moment_B2、Correlation_B2、Variance_B3、Homogeneity_B3、Contrast_B3、Dissimilarity_B3、Homogeneity_B4前10个纹理特征值与LCC相关系数绝对值在0.51~0.66之间,达到极显著水平(<0.01)。

图6 马铃薯现蕾期和块茎形成期纹理特征相关系数矩阵图
2.2 马铃薯叶绿素含量估算模型构建
2.2.1 多光谱植被指数的LCC模型构建

从图7a可知,现蕾期,选择MTCI、CIG 、DVIGRE、RDVIREG 4个植被指数作为自变量建模,全子集效果最好;从图7b可知,块茎形成期,选择NDVI、CIR、SAVI、RVIRE、GRDVI、MSR 6个植被指数作为自变量建模,全子集效果最好;块茎增长期,选择G、NDVI、CIG、SAVIGRE、DVIGRE、OSAVI 6个植被指数自变量构建估算模型;淀粉积累期,选择G、R、NDVI、CIG和SAVIGRE、DVIGRE、OSAVIGRE 7个植被指数作为自变量建模;成熟期,G、R、CIR、NDRE、DVIREG、OSAVIRE 6个植被指数作为自变量建模。



基于折交叉验证的全子集构建LCC估算模型,各生育期子集分析见图8。由图8可知,现蕾期,选择NIR、MTCI、RVIGRE、DVI、DVIREG、DVIGRE、RDVIREG、SAVIGRE 8个指数作为建模自变量,K折交叉的平均偏差最小;块茎形成期,选择 NDVI、RVI、CIR、SAVI、RVIREG、OSAVI、RDVI、MSR、MSRREG 9个植被指数时折交叉的平均偏差最小;块茎增长期,选择G、NDVI、CIG、SAVIGRE、DVIGRE、OSAVI、OSAVIGRE、MSR 8个植被指数建模,折交叉的平均偏差最小;淀粉积累期,选择G、R、NDVI、CIG、SAVIGRE、DVIGRE、OSAVIGRE、MSR 8个植被指数建模,折交叉的平均偏差最小;成熟期,选择G、R、CIR、NDRE、DVIREG、OSAVIREG、RDVIREG、MSRREG 8个植被指数建模,折交叉的平均偏差最小。

图8 各生育期植被指数基于10折交叉验证全子集分析自变量筛选

表3 马铃薯各个生育期多光谱植被指数模型比较
注:*为达到0.05水平显著性;**达到0.01显著性水平。
Note: *: reach a level of 0.05 significance; **: reach a level of 0.01 significance.
2.2.2 多光谱纹理特征的LCC模型构建

图9 现蕾期和块茎形成期纹理特征基于全子集分析
从图9a可知,现蕾期,选择Mean_B1、Homogeneity_B1、Contrast_B1、Dissimilarity_B1、Mean_B4 5个纹理特征参与建模,全子集效果最好;块茎形成期,选择Correlation_B2、Mean_B3、Variance_B3、Homogeneity_B3、Contrast_B3、Dissimilarity_B3 6个纹理特征作为自变量,全子集效果最好;块茎增长期,选择Mean_B1、Entropy_B1、Second Moment_B1 3个纹理特征建模,全子集效果最好;淀粉积累期,优选出Mean_B1、Second Moment_B1、Homogeneity_B2、Second Moment_B2 4个纹理特征作为自变量,全子集效果最好;成熟期,Mean_B1、Mean_B2、Entropy_B2、Second Moment_B2、Correlation_B2、Variance_B3 6个纹理特征作为自变量建模。
基于10折交叉验证的全子集分析构建LCC估算模型,各生育期子集分析见图10。
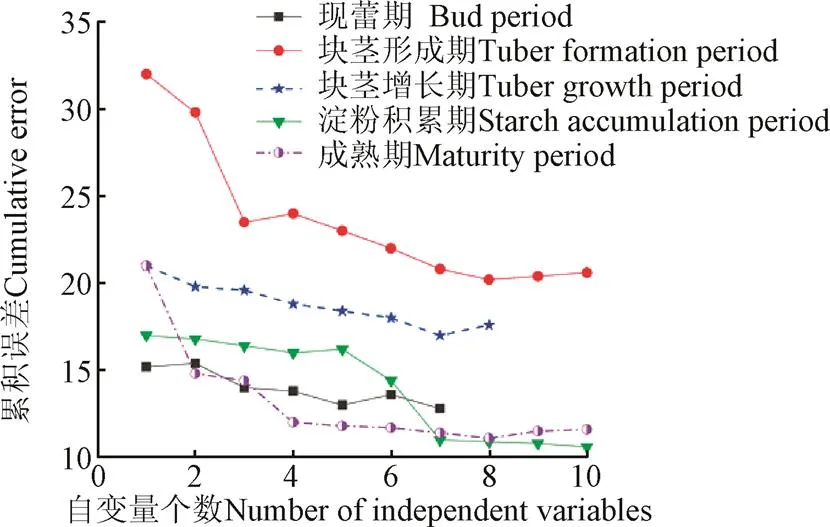
图10 各生育期纹理特征基于10折交叉验证全子集分析自变量筛选
由图10可知,结现蕾期,优选Mean_B1、Variance_B1、Homogeneity_B1、Contrast_B1、Dissimilarity_B1、Mean_B3、Mean_B4 7个纹理特征作为自变量进行建模,全子集效果最好;块茎形成期,Correlation_B2、Mean_B3、Variance_B3、Homogeneity_B3、Contrast_B3、Dissimilarity_B3、Entropy_B3、Second Moment_B3 8个纹理特征作为自变量建模,全子集效果最好;块茎增长期,优选Mean_B1、Homogeneity_B1、Contrast_B1、Dissimilarity_B1、Entropy_B1、Second Moment_B1、Mean_B2 7个纹理特征作为自变量建模,全子集效果最好;淀粉积累期,Mean_B1、Variance_B1、Homogeneity_B1、Contrast_B1、Dissimilarity_B1、Entropy_B1、Second Moment_B1、Homogeneity_B2、Entropy_B2、Second Moment_B2 10个纹理特征作为自变量建模,全子集效果最好;成熟期,优选Mean_B1、Mean_B2、Entropy_B2、Second Moment_B2、Correlation_B2、Variance_B3、Homogeneity_B3、Dissimilarity_B3 8个纹理特征作为自变量建模,全子集效果最好。

表4 马铃薯各个生育期多光谱纹理特征模型比较
2.2.3 综合VI和Texture的LCC模型研究
将植被指数(VI)与纹理指标(texture)通过PCA进行降维融合,构建综合的“图-谱”融合指标,探究“图-谱”融合指标估算LCC的效果。在进行主成分分析之前,首先对上述各生育期筛选的多光谱的植被指数和纹理特征进行统计学的线性回归的共线性诊断,判断因子之间的共线性。各个生育期的共线性诊断,依据条件索引>10,自变量间存在严重共线性,得知各个生育期自变量间的存在严重共线性,因此对各生育期的自变量进行PCA降维融合很有必要。
依据累计贡献率大于99%的原则筛选主成分以表示原始变量,确定各生育期的最佳主成分为9个、10个、6个、8个和10个,基于PCA-MLR建模。在马铃薯整个生育期,建模结果见表5,验证结果见图11。从图11可知,5个生育期的验证模型的2分别为0.870、0.548、0.504、0.664和0.851,NRMSE分别为6.6%、9.2%、11.3%、8.3%和11.6%,说明模型稳定性很好。

表5 各生育期基于PCA-MLR模型精度评定
2.3 较优马铃薯叶绿素含量估测模型选择
基于不同影像变量的马铃薯叶绿素含量估测模型进行评价与筛选,筛选出较优估测模型。结果如表3-5所示。通过分析比较表3-5可知:1)在马铃薯的各个生育期,基于多光谱植被指数构建叶绿素含量估测模型要普遍优于基于多光谱的纹理特征值LCC估算模型;多光谱植被指数模型与多光谱综合融合指标模型相比,后者模型的2明显提高,RMSE和NRMSE明显降低。2)现蕾期,综合指标模型2比植被指数模型、纹理特征模型提升0.104和0.136,而NRMSE降低1.3个百分点和1.6个百分点;3)块茎形成期,综合指标模型2比植被指数模型、纹理特征模型分别提升0.04、0.101,NRMSE降低了0.5个百分点和1.2个百分点;4)块茎增长期,综合指标模型2较植被指数模型、纹理特征模型提升0.075和0.111,NRMSE降低了0.9个百分点和1.3个百分点;5)淀粉积累期,综合指标模型2较植被指数模型、纹理特征模型提升0.017和0.046,NRMSE降低了0.2个百分点和0.6个百分点;6)成熟期,综合指标模型2比植被指数模型、纹理特征模型提升0.088和0.057,NRMSE降低2.3个百分点和1.5个百分点。

图11 综合指标模型验证
2.4 基于综合指标的马铃薯叶绿素含量估算及填图
由2.3节可知,综合指标构建的马铃薯叶绿素含量模型较优。首先计算各生育期所需植被指数和纹理指数得到对应的主成分,读取多光谱图像矩阵,然后利用表6中模型研究区马铃薯叶绿素含量填图及可视化,并对栅格图进行分类显示,结果如图12所示。

表6 基于综合指标马铃薯叶绿素含量较优模型
注:模型中1-7是综合的“图-谱”融合指标,也即从植被指数和纹理特征中提取的对应生育期的主成分。
Note:1-7are comprehensive map-spectrum fusion index, that is, the principal components of corresponding growth period are extracted from vegetation index and texture feature.
由马铃薯5个典型生育期叶绿素含量分布图以及图2叶绿素含量箱线图分布可知,二者分布基本一致。首先,现蕾期,此时以地上部茎叶生长为中心,因此马铃薯叶绿素含量比其他4期叶绿素含量高;块茎形成期,此时地上部茎叶生长与地下部块茎生长并进,叶绿素含量较现蕾期有所降低,但最大值分布比后3期大;块茎增长期,茎叶和块茎增长都非常迅速,是一生中生长最快的时期,此时地上部茎叶制造的养分已经开始向块茎输送;淀粉积累期,由于马铃薯地上茎停止生长,但同化物不断向块茎转运,因此地上部分叶绿素明显稍逊于前三期,地上茎叶三分之二已经枯黄,叶绿素含量较低。成熟期,马铃薯地上茎叶基本完全枯黄,此时叶绿素含量最低,这也是成熟期NRMSE最大的原因,而且S区氮素梯度试验分布在后2期更为清晰。通过对马铃薯叶绿素含量进行填图,能更加直观快速无损高通量地掌握马铃薯植株分布的营养状况,实现对马铃薯的营养状况进行实时诊断、策略施肥追肥等。
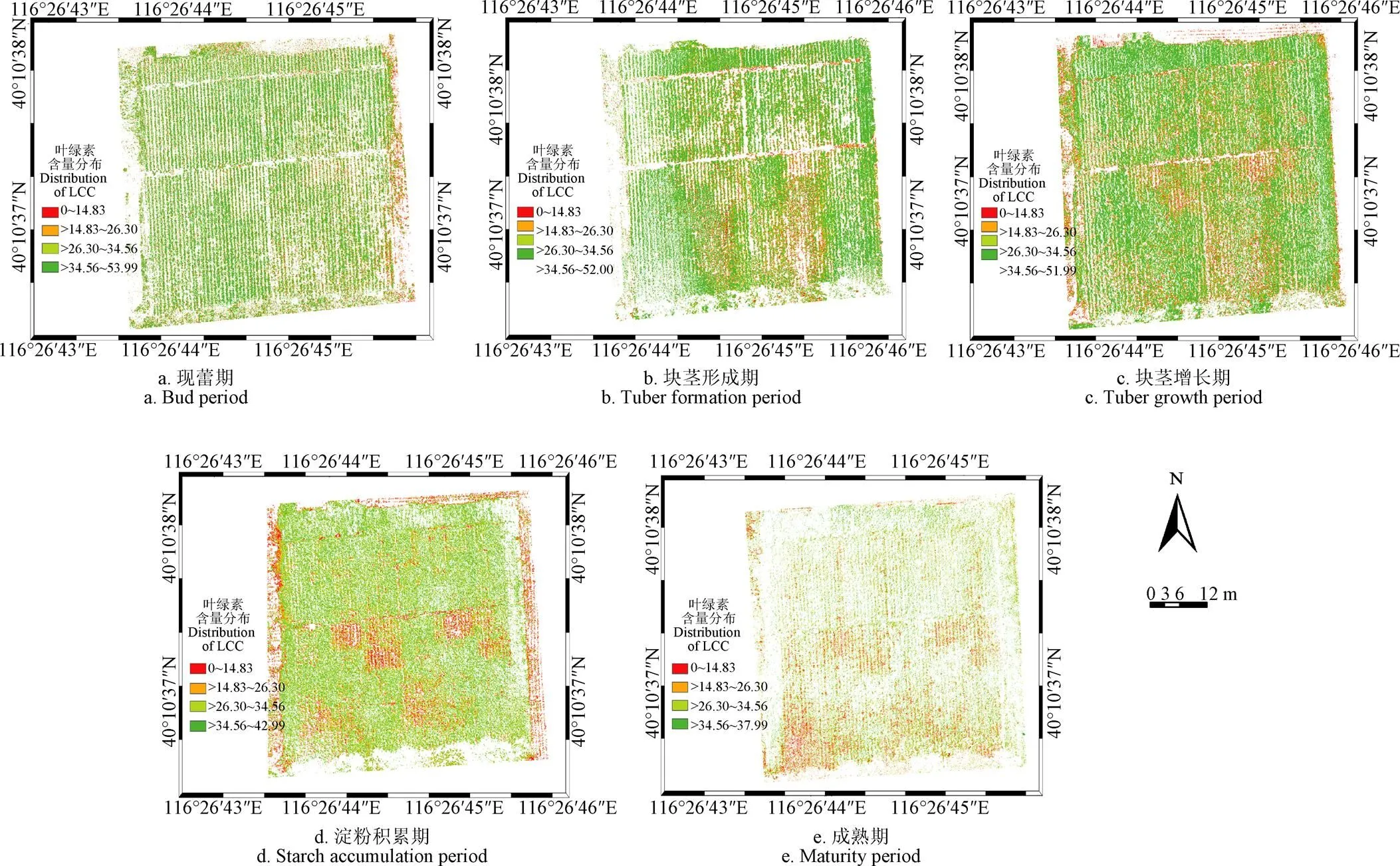
图12 马铃薯5个典型生育期叶绿素含量分布
3 讨 论
多光谱指数估算模型与纹理特征估算模型相比,植被指数模型明显较优于纹理特征估算模型,这与王娣[10]在水稻估产进行的模型比较结果一致,一则可能由于提取纹理特征时,仅仅采用一种滤波方式具有局限性,因此后续可以考虑加入多种纹理滤波方法;再则,可能由于样本数据较少,对于模型鲁棒性有一定影响,后续可以增加样本量、作物品种、不同年限以及更多地区等来验证模型,进而提升模型普适性及鲁棒性。
4 结 论
本文利用无人机搭载多光谱相机获取马铃薯的多光谱影像,利用PCA融合图像的光谱信息和纹理信息构建一种新的综合指标模型,估算马铃薯叶绿素含量,主要获得以下结论:
1)多光谱植被指数估算模型,在现蕾期、块茎形成期、块茎增长期和成熟期中,基于折交叉验证分析明显优于基于调整2分析,淀粉积累期2种方法基本无差别。其中基于10折交叉验证的全子集分析构建LCC估算模型为较优模型。
3)现蕾期,综合指标模型2比植被指数模型、纹理特征模型提升0.104和0.136,而NRMSE降低1.3个百分点和1.6个百分点;块茎形成期,综合指标模型2比植被指数模型、纹理特征模型分别提升0.04和0.101,NRMSE降低了0.5个百分点和1.2个百分点;块茎增长期,综合指标模型2较植被指数模型、纹理特征模型提升0.075和0.111,NRMSE降低了0.9个百分点和1.3个百分点;淀粉积累期,综合指标模型2比植被指数模型、纹理特征模型分别提升0.017和0.046,NRMSE降低0.2个百分点和0.6个百分点;成熟期,综合指标模型决定系数比植被指数模型、纹理特征模型提升0.088和0.057,标准均方根误差降低2.3个百分点和1.5个百分点。总之,全生育期,表明综合指标模型2比植被指数模型、纹理特征模型均有提高,而NRMSE均降低,表明综合指标估算模型优于单类型变量估算模型,多光谱植被指数估算模型次之,纹理特征模型较差。
综上,基于无人机遥感多光谱影像的综合指标,可以较好地估算马铃薯叶绿素含量,为监测马铃薯生长营养状况提供一种可行的方法。
[1] 焦全军,张兵,张霞,等. 植被叶绿素含量的冠层层次遥感诊断研究[C]//焦全军.全国分子光谱学术报告会. 北京:2008:119-120.
Jiao Quanjun, Zhang Bing, Zhang Xia, et al. Canopy hierarchical remote sensing diagnosis of vegetation chlorophyll content[C]// Jiao Quanjun. National Molecular Spectroscopy Academic Conference. Beijing: 2008: 119-120. (in Chinese with English abstract)
[2] 赵春江. 农业遥感研究与应用进展[J]. 农业机械学报,2014,45(12):277-293.
Zhao Chunjiang. Advances in agricultural remote sensing research and application[J]. Transactions of the Chinese Society of Agricultural Machinery, 2014, 45(12): 277-293. (in Chinese with English abstract)
[3] Zhang C, Kovacs J M. The application of small unmanned aerial systems for precision agriculture: A review[J]. Precision Agriculture, 2012, 13(6): 693-712.
[4] Yun S, Shun-Ping J I, Shao X W, et al. Framework of SAGI agriculture remote sensing and its perspectives in supporting national food security[J]. Journal of Integrative Agriculture, 2014, 13(7): 1443-1450.
[5] Borhan M S, Panigrahi S, Lorenzen J H, et al. Multispectral and color imaging techniques for nitrate and chlorophyll determination of potato leaf in a controlled environment[J]. Transactions of the Asae, 2004, 47(2): 599-608.
[6] 王伟,彭彦昆,马伟,等.冬小麦叶绿素含量高光谱检测技术[J]. 农业机械学报,2010,41(5):172-177.
Wang Wei, Peng Yankun, Ma Wei, et al. Hyperspectral detection technology of chlorophyll content in winter wheat[J]. Transactions of the Chinese Society of Agricultural Machinery, 2010, 41(5): 172-177.(in Chinese with English abstract)
[7] 刘豪杰,赵毅,文瑶,等. 基于多波段光谱探测仪的玉米冠层叶绿素含量诊断[J]. 农业机械学报,2015,37(增刊1):228-233.
Liu Haojie, Zhao Yi, Wen Yao, et al. Diagnosis of corn canopy chlorophyll content based on multi-band spectral detector[J]. Transactions of the Chinese Society of Agricultural Machinery, 2015, 37(Supp.1): 228-233. (in Chinese with English abstract)
[8] 陈君颖,田庆久,施润,等. 水稻叶片叶绿素含量的光谱反演研究[J]. 遥感信息,2005(6):12-16.
Chen Junying, Tian Qingjiu, Shi Run et al. Spectral inversion of chlorophyll content in rice leaves[J]. Remote Sensing Information, 2005(6): 12-16. (in Chinese with English abstract)
[9] 冯海宽,杨福芹,杨贵军,等. 基于特征光谱参数的苹果叶片叶绿素含量估算[J]. 农业工程学报,2018,34(6):182-188.
Feng Haikuan, Yang Fuqin, Yang Guijun, et al. Estimation of chlorophyll content in apple leaves based on characteristic spectral parameters[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(6): 182-188. (in Chinese with English abstract)
[10] 王娣. 高光谱与多光谱遥感水稻估产研究[D]. 武汉:武汉大学,2017.
Wang Wei. High-spectral and Multi-Spectral Remote Sensing Rice Yield Estimation[D]. Wuhan: Wuhan University, 2017. (in Chinese with English abstract)
[11] 李长春,牛庆林,杨贵军,等. 基于无人机数码影像的大豆育种材料叶面积指数估测[J]. 农业机械学报,2017,48(8):147-158.
Li Changchun, Niu Qinglin, Yang Guijun, et al. Estimation of leaf area index of soybean breeding materials based on digital image of unmanned aerial vehicle[J]. Transactions of the Chinese Society of Agricultural Machinery, 2017, 48(8): 147-158. (in Chinese with English abstract)
[12] Li W, Niu Z, Chen H, et al. Remote estimation of canopy height and aboveground biomass of maize using high-resolution stereo images from a low-cost unmanned aerial vehicle system[J]. Ecological Indicators, 2016, 67: 637-648.
[13] Bendig J, Yu K, Aasen H, et al. Combining UAV-based plant height from crop surface models, visible, and near infrared vegetation indices for biomass monitoring in barley[J]. International Journal of Applied Earth Observation & Geoinformation, 2015, 39: 79-87.
[14] Schirrmann M, Giebel A, Gleiniger F, et al. Monitoring agronomic parameters of winter wheat crops with low-cost UAV imagery[J]. Remote Sensing, 2016, 8(9): 706.
[15] 朱沛林. 基于遥感纹理特征的针叶林蓄积量反演模型[D]. 北京:北京林业大学,2014.
Zhu Peilin. Inversion Model of Coniferous Forest Stocks Based on Remote Sensing Texture Features[D]. Beijing: Beijing Forestry University, 2014. (in Chinese with English abstract)
[16] 李明诗,谭莹,潘洁,等. 结合光谱、纹理及地形特征的森林生物量建模研究[J]. 遥感信息,2006,88:6-9,66.
Li Mingshi, Tan Ying, Pan Jie, et al. Forest biomass modeling based on spectral, texture and topographic features[J]. Remote Sensing Information, 2006, 88: 6-9,66. (in Chinese with English abstract)
[17] 龚红菊,姬长英. 基于图像处理技术的麦穗产量测量方法[J]. 农业机械学报,2007,38(12):116-119.
Gong Hongju, Ji Changying. Measurement method of wheat ear yield based on image processing technology[J]. Transactions of the Chinese Society of Agricultural Machinery, 2007, 38(12): 116-119. (in Chinese with English abstract)
[18] Lichtenthaler H K. Chlorophylls and carotenoids: Pigments of photosynthetic biomembranes[J]. Methods in Enzymology, 1987, 148(34): 350-382.
[19] Jordan C F. Derivation of leaf‐area index from quality of light on the forest floor[J]. Ecology, 1969, 50(4): 663-666.
[20] Rouse J W. Monitoring the vernal advancement and retrogradation (greenwave effect) of natural vegetation[J]. Nasa, 1974: 1-12.
[21] Barnes E M, Clarke T R, Richards S E, et al. Coincident detection of crop water stress, nitrogen status and canopy density using ground-based multispectral data[C]// Barnes E M. International Conference on Precision Agriculture and Other Resource Management July 16-19, 2000, Bloomington, Mn Usa, 2000.
[22] Gitelson A A, Kaufman Y J, Merzlyak M N. Use of a green channel in remote sensing of global vegetation from EOS-MODIS[J]. Remote Sensing of Environment, 1996, 58(3): 289-298.
[23] Huete A R. A soil-adjusted vegetation index (SAVI)[J]. Remote Sensing of Environment, 1988, 25(3): 295-309.
[24] Rondeaux G, Steven M, Baret F. Optimization of soil-adjusted vegetation indices[J]. Remote Sensing of Environment 1996,55(2): 95-107.
[25] Roujean J L, Breon F M. Estimating PAR absorbed by vegetation from bidirectional reflectance measurements[J]. Remote Sensing of Environment, 1995, 51(3): 375-384.
[26] Chen J M. Evaluation of vegetation indices and a modified simple ratio for boreal applications[J]. Canadian Journal of Remote Sensing, 1996, 22(3): 229-242.
[27] Gitelson A A, Viña A, Arkebauer T J, et al. Remote estimation of leaf area index and green leaf biomass in maize canopies[J]. Geophysical Research Letters, 2003, 30(30): 335-343.
[28] Gitelson A A, Viña A, Verma S B, et al. Relationship between gross primary production and chlorophyll content in crops: Implications for the synoptic monitoring of vegetation productivity[J]. Journal of Geophysical Research Atmospheres, 2006, 111:D08.
[29] Dash J, Jeganathan C, Atkinson P M. The use of MERIS terrestrial chlorophyll index to study spatio-temporal variation in vegetation phenology over India[J]. Remote Sensing of Environment, 2010, 114(7): 1388-1402.
[30] Jamieson P D, Porter J R, Wilson D R. A test of the computer simulation model ARCWHEAT1 on wheat crops grown in New Zealand[J]. Field Crops Research, 1991, 27(4): 337-350.
[31] Zhu Y, Li Y, Feng W, et al. Monitoring leaf nitrogen in wheat using canopy reflectance spectra[J]. Canadian Journal of Plant Science, 2006, 86(4): 1037-1046.
[32] Torressánchez J, Lópezgranados F, Serrano N, et al. High-Throughput 3-D monitoring of agricultural-tree plantations with unmanned aerial vehicle (UAV) technology[J]. Plos One, 2015, 10(6): e0130479.
[33] 侯群群,王飞,严丽. 基于灰度共生矩阵的彩色遥感图像纹理特征提取[J]. 国土资源遥感,2013,25(4):26-32.
Hou Qunqun, Wang Fei, Yan Li. Texture feature extraction of color remote sensing image based on gray level co-occurrence matrix[J]. Remote Sensing for Land & Resources, 2013, 25(4): 26-32. (in Chinese with English abstract)
[34] 刘龙飞,陈云浩,李京. 遥感影像纹理分析方法综述与展望[J]. 遥感技术与应用,2003,18(6):441-447.
Liu Longfei, Chen Yunhao, Li Jing. Review and prospect of remote sensing image texture analysis methods[J]. Remote Sensing Technology and Application, 2003, 18(6): 441-447. (in Chinese with English abstract)
[35] 刘畅,杨贵军,李振海,等. 融合无人机光谱信息与纹理信息的冬小麦生物量估测[J]. 中国农业科学, 2018, 51(16):3060-3073.
Estimation of chlorophyll content in potato using fusion of texture and spectral features derived from UAV multispectral image
Chen Peng1,2,3,4, Feng Haikuan1,2,3※, Li Changchun4, Yang Guijun1,2,3, Yang Junsen1,2,3,5, Yang Wenpan1,2,3,4, Liu Shuaibing1,2,3,4
(1.100097,; 2.100097,; 3.100097,; 4.454000,; 5.123000,)
Chlorophyll is an important pigment for crop light energy utilization, which directly affects the process of energy material conversion and transmission. The change of chlorophyll content directly reflects the ability of photosynthesis and the nutritional status of crop growth. When the traditionalunmanned aerial vehicle (UAV) remote sensing was used for crop nutrition monitoring, most of them started from the spectral vegetation indices, ignoring the characteristics of the image itself. In this study, we estimated potato leaf chlorophyll content from a comprehensive index formed by the fusion of multi-spectral vegetation indices, texture features and comprehensive indicators of data fusion. The effect of comprehensive index model on estimating potato leaf chlorophyll content was explored. First, we used the UAV multi-spectral images during the whole potato growth period in 2018 in Xiaotangshan, Changping, and Beijing. The multi-spectral vegetation index, texture characteristics and other variables were first extracted from UVA images, then their correlation relationships with leaf chlorophyll content were analyzed. The optimal image variables were screened out, and the whole subset analysis was based on adjusted determination coefficient and 10-fold cross-validation was used to estimate the leaf chlorophyll content of potato. Finally, the vegetation index and texture features were reconstructed by principal component fusion to establish a new comprehensive index for chlorophyll content estimation. It was found that the leaf chlorophyll content estimation model based on comprehensive index was better than that based on multi-spectral vegetation indices and texture features. The main reason was that the comprehensive index contained both spectral information and image texture information. Multispectral information and model accuracy had also been significantly improved. In the bud period, compared with the vegetation indices based model and the texture feature based model, the determination coefficient (2) of the comprehensive index model increased 0.104 and 0.136, while the normalized root mean squared error (NRMSE) reduced 1.3 percentage point and 1.6 percentage point. During the tuber formation period, the determination coefficient of comprehensive index model was increased 0.04.and 0.101, while the NRMSE was decreased 0.5 percentage point and 1.2 percentage point, compared with the other 2 models. In the tuber growth period, the determination coefficient of comprehensive index model increased 0.075 and 0.111, and the NRMSE decreased 0.9 percentage point and 1.3 percentage point compared with the vegetation index model and the texture feature model. During the starch accumulation period, the2of comprehensive index model increased 0.017 and 0.046, and the NRMSE decreased 0.2 percentage point and 0.6 percentage point, compared with vegetation index model and texture feature model. In the maturity period, the determination coefficient of comprehensive index model increased 0.088 and 0.057, and the NRMSE decreased 2.3 percentage point and 1.5 percentage point. Therefore, the effect of comprehensive index estimation model was the best followed by multi-spectral vegetation indices model and the texture feature model was the worst. The starch accumulation period was the best growth period for estimating chlorophyll content by multispectral vegetation index and texture characteristics, while bud period was the best growth period for estimating chlorophyll content by comprehensive index. Estimating potato chlorophyll content based on multi-spectral image from UAV platform can provide a feasible method for potato growth nutrition monitoring. It realizes low-cost, fast and high-throughput monitoring of potato growth and nutrition information, as well as provides guarantee for fine management of farmland irrigation, variable fertilization and so on.
unmanned aerial vehicle; crops; remote sensing; potato; chlorophyll content; multispectral; texture feature; total subset analysis
2018-12-04
2019-04-26
国家自然科学基金(41601346,41871333);河南省科技攻关项目(182102110186)
陈 鹏,研究实习员,主要从事农业定量遥感研究。Email:1415086181@qq.com
冯海宽,助理研究员,主要从事农业定量遥感研究。Email:fenghaikuan123@163.com
10.11975/j.issn.1002-6819.2019.11.008
S252
A
1002-6819(2019)-11-0063-12
陈 鹏,冯海宽,李长春,杨贵军,杨钧森,杨文攀,刘帅兵. 无人机影像光谱和纹理融合信息估算马铃薯叶片叶绿素含量[J]. 农业工程学报,2019,35(11):63-74. doi:10.11975/j.issn.1002-6819.2019.11.008 http://www.tcsae.org
Chen Peng, Feng Haikuan, Li Changchun, Yang Guijun, Yang Junsen, Yang Wenpan, Liu Shuaibing. Estimation of chlorophyll content in potato using fusion of texture and spectral features derived from UAV multispectral image[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(11): 63-74. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.11.008 http://www.tcsae.org
