基于侦察幅度信息的雷达行为及特征分析
2019-07-22宋新超吴连慧王星宇
宋新超,吴连慧,王星宇
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
雷达侦察设备测量的脉冲幅度(PA)信息[1]反映的是雷达辐射源相对于侦察设备功率的大小,而雷达电磁波到达侦察设备的功率变化又反映了雷达天线的波束指向或扫描方式的改变。因此,通过分析雷达幅度的强弱变化可以挖掘雷达波束变化规律以及搜索、跟踪特性,进而推断雷达目标的行为、意图以及模式变化规律。
1 基于幅度信息的雷达扫描特征分析
通过幅度信息来判断雷达处于跟踪或搜索状态,是最常用的方法。通常原则是幅度值恒定不变(或小范围起伏),可以判定为跟踪,而幅度大范围起伏变化,则基本可以判定为搜索状态。目前雷达常见的几种规则扫描方式包括圆扫、扇扫、锥扫等[2],如图1所示。

图1 雷达扫描特性示意图
对搜索体制雷达的扫描特性分析[3]通常有2种方法:一是通过计算相邻2个雷达扫描包络的首脉冲到达时间间隔来获得扫描周期,如图2(a);另一种方式是首先找到包络中幅度最大的脉冲,即包络波峰,然后计算波峰之间到达时间间隔,即为扫描周期,如图2(b)。方法一实现简单,只需记录截获包络的首脉冲到达时间,不需要区分主副瓣,但是在雷达功率较大时,会出现较长的副瓣且不稳定。如图3所示的外场实际采集的雷达扫描包络图,这样计算得到的扫描周期存在较大的误差,甚至无法获得稳定的扫描周期。而方法二利用包络主瓣波峰的时间差来计算扫描周期,能够避免因副瓣丢失或不稳定造成的计算误差,从而获得较为精确的扫描周期值。

图2 扫描周期示意图
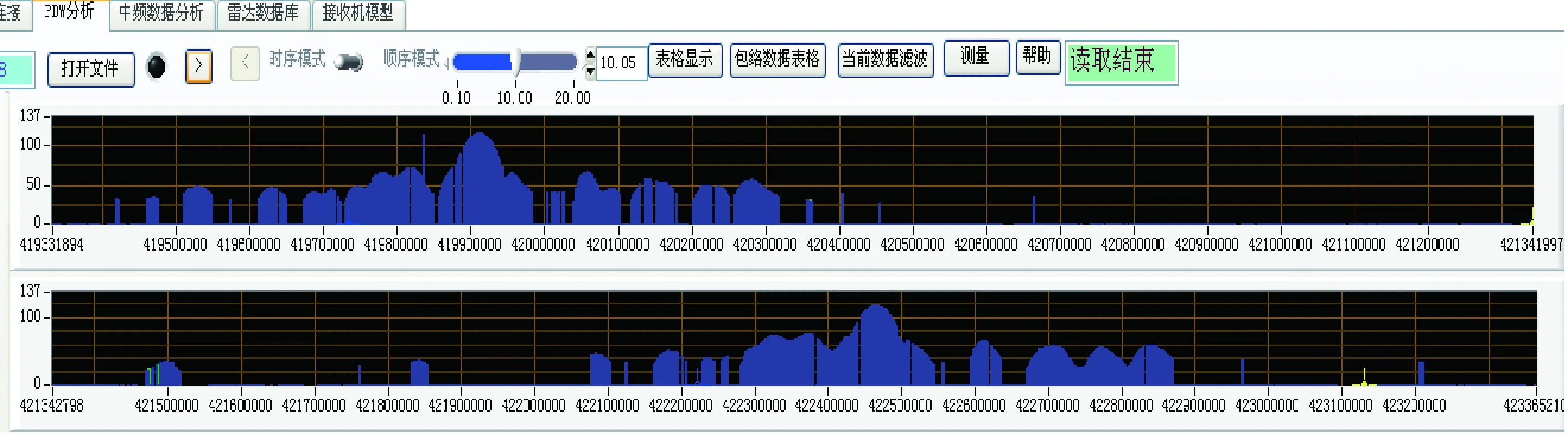
图3 超长雷达副瓣
2 基于幅度信息的末制导雷达行为特征分析
通常导弹末制导雷达工作模式转变示意图如图4所示。雷达在搜索、小搜、跟踪等行为转变过程中,其相对于侦察设备的功率会发生变化。因此利用侦察设备测量的雷达幅度变化特征,可快速确定威胁目标当前的行为方式以及对我方的威胁程度。
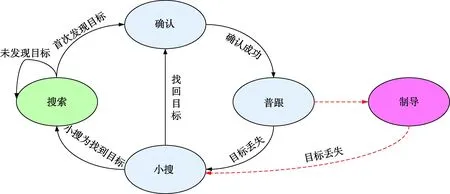
图4 末制导雷达工作模式转换示意图
对末制导雷达的行为识别过程如图5所示,首先从侦察设备获取威胁辐射源脉冲序列,生成幅度随时间变化的波形,对这个幅度波形提取幅度直方图、峰值、谷值以及峰值之差、谷值之差等参数,综合利用这些参数特征可对末制导雷达的行为进行识别。具体步骤如下:

图5 对末制导雷达的行为识别示意图
(1) 计算幅度直方图。将参数匹配的脉冲串的幅度依次添加到直方图中,直方图横轴为幅度值,纵轴为脉冲个数。统计后的幅度直方图如图6所示。

图6 搜索和跟踪目标的幅度直方图示意图
(2) 提取幅度峰值和谷值。采用统计学中的“百分位数”方法进行幅度峰值(Amax)和谷值(Amin)提取,剔除异常值对幅度峰值和谷值的影响,设脉冲串脉冲数为N。获取的幅度峰值(Amax)、幅度谷值(Amin)如图6所示;采用“百分位数”进行幅度峰值提取的流程图如图7(a)所示,进行幅度谷值提取的流程图如图7(b)所示。
(3) 分类判决。设置幅度容差ΔA(如5 dB),根据幅度峰值、谷值与幅度容差之间的关系,进行搜索状态和跟踪状态判断。
① 计算相邻2个时间片t的Amax的变化量和Amin的变化量:
Amax的变化量:dAmax=Amax(t)-Amax(t-1);
Amin的变化量:dAmin=Amin(t)-Amin(t-1);
分别统计2 s时间段内dAmax和dAmin的值:若存在|dAmax|>ΔA或|dAmin|>ΔA,判断为搜索状态;若|dAmax|<ΔA且|dAmin|<ΔA,判断为跟踪状态。

图7 幅度峰值和幅度谷值提取流程图

图8 雷达行为识别验证
如图8所示,左侧为外场采集的某雷达脉冲幅度数据,右侧为提取的dAmax和dAmin值以及判断结果。可见,采取幅度统计的方法能够对雷达行为进行有效识别。
3 基于幅度信息的相控阵雷达波束特征分析
3.1 相控阵天线波束离散扫描的工作方式
与常规的机械扫描天线不同,相控阵雷达既要完成搜索任务,同时又要完成跟踪任务[4],其通过调整阵面上各阵元之间的相对相位来实现波束扫描,并通过时间资源的分配实现波束之间的驻留和切换,因此相控阵天线一般具有“驻留—切换—驻留”的离散扫描工作方式。
相控阵天线离散扫描的工作方式将导致侦察接收机截获的信号具有阶梯型的幅度特征。如图9(a)所示,侦察接收机对天线的旁瓣进行接收,在波束指向方向1并驻留期间,天线增益保持不变,侦察接收机截获到一串相同幅度的脉冲列信号;波束切换到方向2后,由于天线阵面上的相位分布发生改变,整个天线的方向图随之发生变化,波束切换后的方向图如图9(a)中虚线所示。可见,在波束切换前后的很短时间内,在侦察接收机方向,天线的增益发生了改变,这将导致接收信号幅度相应地发生跳变,得到如图9(b)所示的阶梯型的脉冲幅度序列,幅度跳变的时刻对应波束指向切换的时刻。图10为侦察设备外场采集的真实相控阵雷达幅度数据,其规律与上述描述一致。

图9 相控阵波束扫描及幅度关系示意图

图10 相控阵雷达幅度图
3.2 波形单元提取
相控阵雷达通过执行一系列的雷达任务来实现雷达功能,不同的雷达任务一般对应着不同的波束指向,并在该波束的驻留期间发射一个或多个波形单元。因此,在波束指向切换前后,发射的波形单元也随之改变,如图11所示。波形单元的改变一般与相控阵天线波束指向的切换同步发生,波束指向的切换将导致截获信号的幅度发生跳变。因此,可以用信号幅度发生跳变的时刻作为边界,将截获信号划分成多个区域,每个区域对应一个波形单元,实现波形单元提取。
4 结束语
本文介绍了基于幅度信息的雷达行为及特征分析的3种典型用法,并结合外场实际数据对相关内容进行了验证和说明。由于电磁波在传输过程中受环境及多径影响较大,测量存在较大误差,目前幅度信息没有得到充分利用。因此对侦察设备而言,一方面要提高侦察接收机信号检测能力,另一方面要加强对幅度信息的特征挖掘,进一步提高侦察设备对目标特征的感知能力。

图11 波形单元提取示意图
