舰载雷达对抗设备测向精度试验系统误差分析及修正方法
2019-07-22周文辉闵柏成
周文辉,闵柏成
(1.解放军91404部队,河北 秦皇岛 066001;2.中国船舶重工集团公司第七二三研究所,江苏 扬州 225101)
0 引 言
随着干涉仪测向技术、单比特频域多波束测向技术等在舰载雷达对抗设备中的广泛应用,雷达对抗设备的方位测量误差越来越小,这就对组织试验考核提出了更高的要求。外场动态试验中,受被试设备临时安装条件的影响,雷达对抗设备测向天线安装位置与试验平台艏艉线不平行而引起偏离一定的角度;雷达对抗设备测向天线与提供舰位信息、航向姿态的试验平台姿态测量系统天线位置不一致等,都会造成一定的系统误差,这种误差对雷达对抗设备的测向精度考核结果造成较大偏差[1-2]。因此,需要测量计算出系统误差并对试验数据进行误差修正,以消除和减弱系统误差对试验结果的影响。
1 系统误差产生原因分析
外场进行雷达对抗设备测向精度试验时,产生误差的原因多种多样,主要有以下几个方面:测量设备本身的误差、被试设备的安装误差、人为操作使用不当引起的误差、测量条件不正常或测量环境变化影响引起的误差等。有的误差可以避免,有的误差需要进行修正和处理,下面主要从被试设备安装误差、被试设备测向天线与试验平台姿态测量系统天线位置误差、陪试设备大地坐标标定误差3个方面进行分析论述。
1.1 被试设备安装误差
被试设备安装在舰船试验平台上,理想情况是被试设备的测向天线中心线与舰船试验平台艏艉线连线平行,此条件下不存在被试设备安装误差,对测向精度试验结果无影响。实际上,由于受到试验平台条件的限制,被试设备测向天线的安装不可能是理想状态,总是存在安装误差,即被试设备的测向天线中心线与舰船试验平台艏艉线连线的方向存在一个固定的角度,如图1所示。在这种情况下,对测向数据进行处理时,就需要加上(或减去)一个固定系统误差Δθ[2]。
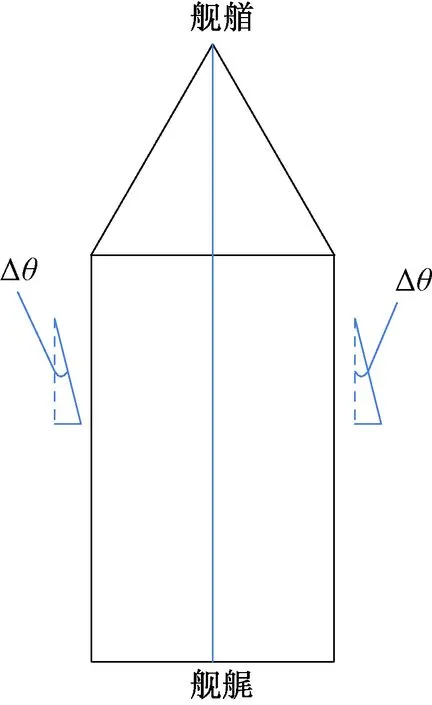
图1 测向天线安装示意图
1.2 被试设备测向天线与试验平台姿态测量系统天线位置误差
雷达对抗设备测向天线一般安装在舰船试验平台的主桅杆上,要求四周无遮挡,而提供舰位信息、航向姿态的试验平台姿态测量系统的天线在安装位置上受到多种因素的限制,只能选择合适的位置架设,且GPS天线的轴向尽量要与舰船试验平台的艏艉线连线平行,二者之间存在着一定的安装距离,如图2所示。以试验平台姿态测量系统天线2所在点位置参数作为被试设备位置来解算舷角作为真值,这样就产生了偏心观测误差,误差大小随着舰船位置及航向变化而变化[3]。
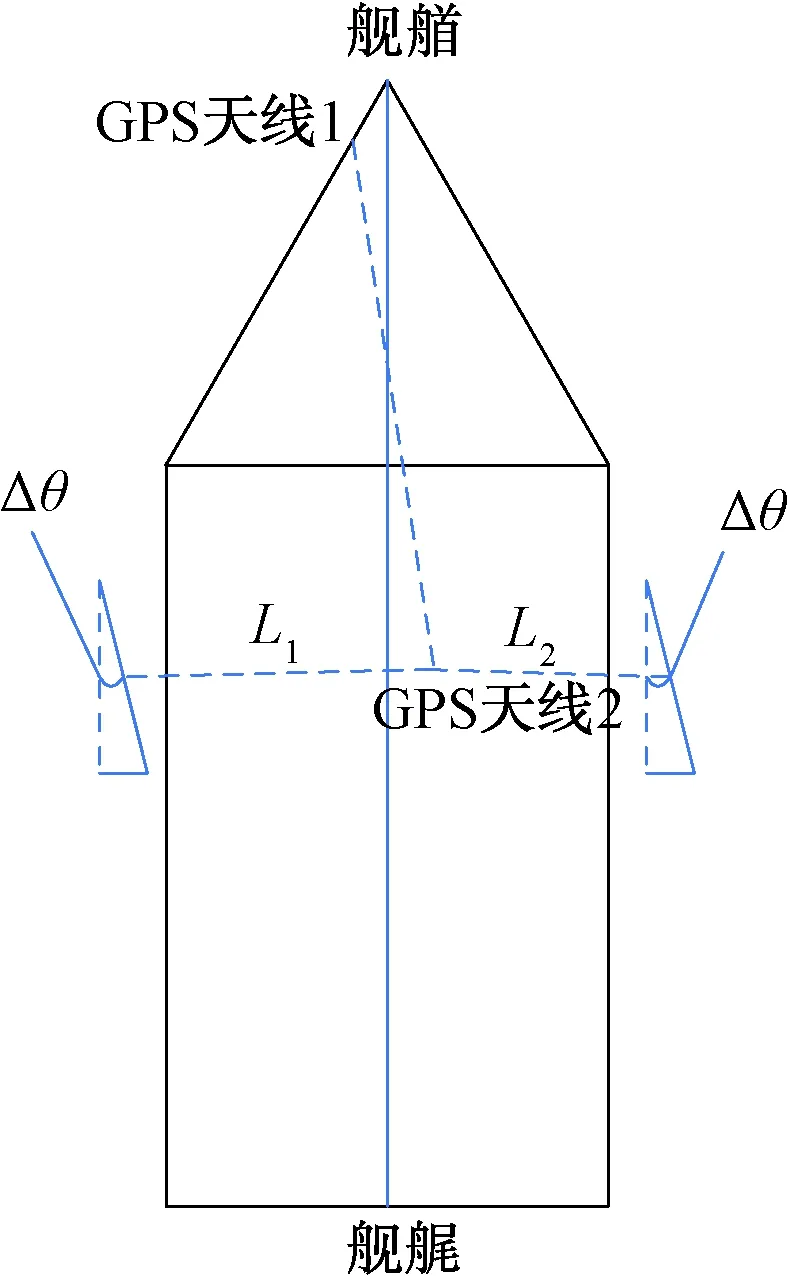
图2 测向天线与GPS天线位置误差示意图
1.3 陪试设备大地坐标标定误差
雷达对抗设备测向精度试验采用的真值是由试验平台姿态测量系统提供,利用GPS天线所在的位置参数和陪试雷达的大地坐标来解算舰船试验平台与岸站陪试雷达的舷角作为真值。由于陪试雷达位置标定存在误差,解算出的舷角存在偏心误差[4]。
2 系统误差修正方法
2.1 被试设备安装误差修正
2.1.1 误差修正设备
在综合处理外场试验的测向精度测试数据时,可以利用全站仪对被试雷达对抗设备安装误差进行测量和计算。全站仪,全称全站式电子测距仪,是一种集经纬仪、电子测距仪、外部计算机软件系统为一体的现代光学电子测量仪器。它可以在一个站位完成水平角、垂直角、距离、高差测量等全部工作。全站仪通过电子光学扫描镌刻在镜片上的十字划分板来测量角度,精度可以达到0.5 s。测距则是以安装在同轴望远镜的光敏二极管以一定光学路径发出调制微波或红外线信号,通过测量点的直角棱镜反射后通过相同的光学路径返回并被分光棱镜传递至传感器以接收回馈,通过计算原始信号与反射信号的相位差来计算路程的远近,它的测距可以达到0.1 mm的精度。
2.1.2 误差修正原理
假设AB为被试雷达对抗设备测向天线的安装基线,OM为试验平台艏艉线,如图3所示。
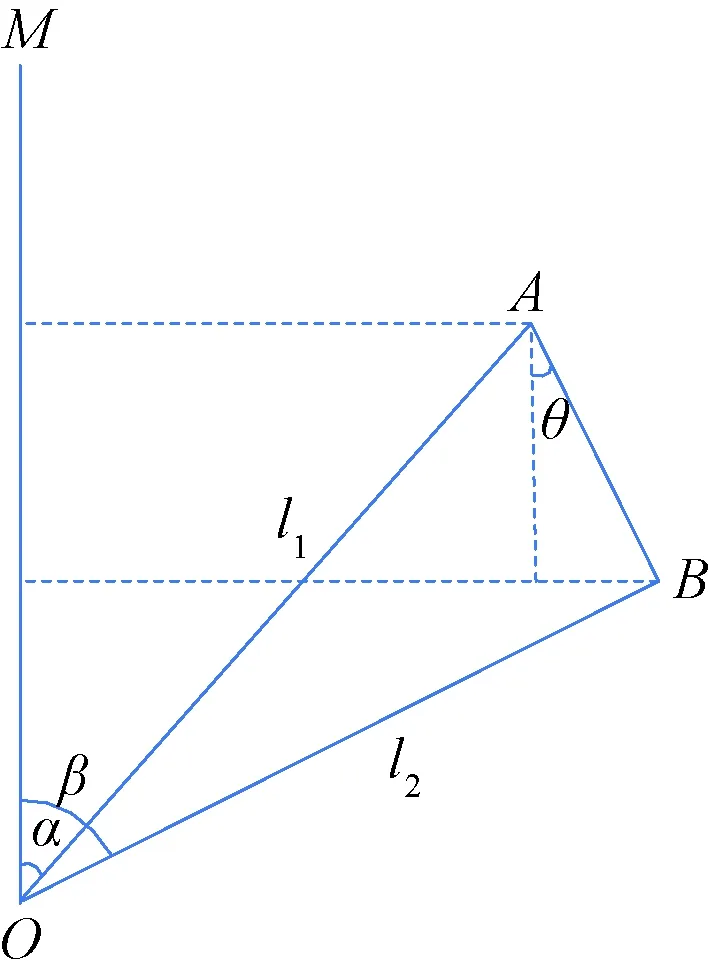
图3 误差修正原理示意图
则被试雷达对抗设备测向天线安装基线AB与试验平台艏艉线OM的夹角为:
(1)
式中:l1为OA水平距离;l2为OB水平距离;α为OA方位角;β为OB方位角。
2.1.3 误差修正方法
在对某型舰载雷达对抗设备进行误差标定时,具体标定测量架设位置如图4所示。
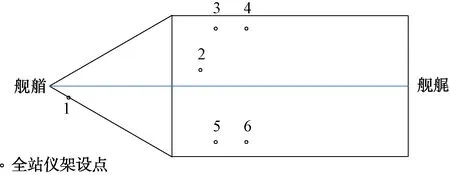
图4 标定架设位置示意图
全站仪架设于码头上,位于被试设备试验平台左前方。测量点1、2为试验平台姿态测量系统天线的架设点,测量点3、4为右舷天线安装螺孔,测量点5、6为左舷天线安装螺孔。分别测量6个测试点距离全站仪的方位、距离、俯仰角,计算系统安装误差如表1所示。在计算过程中,以试验平台姿态测量系统天线架设点连线作为试验平台的航向姿态基准线,分别计算左右舷测向天线相对GPS天线连线的夹角,在实际数据综合处理时,左右舷测向数据分别加上(或减去)对应偏轴误差。

表1 测量数据表
2.2 被试设备测向天线与试验平台姿态测量系统天线位置误差修正
2.2.1 误差修正设备
利用全站仪及试验平台姿态测量系统综合处理计算。
2.2.2 误差修正方法
提供舰位信息、航向姿态的试验平台姿态测量系统天线安装时尽量在试验平台舰船艏艉线上,末端天线所在点与被试设备测向天线存在一定安装距离,以末端天线所在点位置参数作为被试设备天线位置来解算舷角作为真值,解算出的角度与实际角度有一定的误差,被试设备试验平台航行到某一位置时,各位置角度与距离如图5所示。
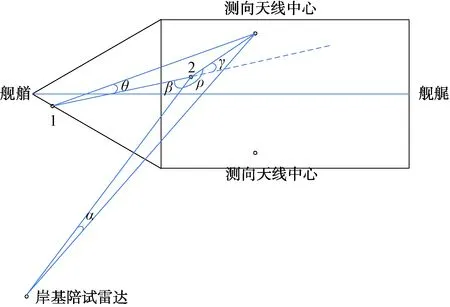
图5 误差修正方法示意图
试验平台姿态测量系统GPS天线1架设在舰艏,GPS天线2架设在前甲板,与被试设备测向天线3点位置固定。设被试设备测向天线与试验平台姿态测量系统天线位置误差为α,利用全站仪测量出被试设备测向天线中心和试验平台姿态测量系统GPS天线2连线的距离L1,测量试验平台姿态测量系统GPS天线连线延长线与L1的夹角γ。试验平台姿态测量系统可提供岸站参试雷达与GPS天线2的距离L2及测量试验平台姿态测量系统GPS天线连线与L2的夹角β(β是个变化量),简化图形如图6所示。
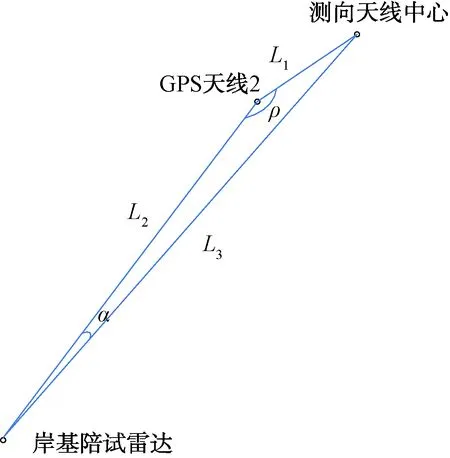
图6 误差修正方法简化示意图
根据余弦定理可得出:
(L3)2=(L1)2+(L2)2-2L1L2cosρ
(2)
式中:ρ=180°-β+γ。
根据正弦定理:
(3)
可得出误差α为:
(4)
式中:β是个变化量,随着试验平台的位置和航向变化而变化。
在做测向原始数据综合处理时,应对每一个点的测向数据结果进行修正,修正时要注意修正误差角度时的象限变化。
2.3 陪试设备大地坐标标定误差修正
虽然岸站陪试雷达位置标定存在误差,但由于标定误差甚小,对测向精度影响程度不大,可忽略不计。为避免误差的产生,在做试验准备前,需要提供高精度的大地点位置坐标,并将陪试雷达设备放置在大地点坐标上,将标定误差降至最低。
3 系统误差修正比对
通过上述分析测向精度试验中产生的系统误差种类和原因及修正方法,测量完成修正各系统误差所需的数据,编写“测向精度处理程序”,完成对测向数据中存在的这些系统误差分析、奇异数据的剔除、误差修正等,最终得到测向精度结果。
现举例说明在对某一新型雷达对抗设备测向精度动态试验时,对试验数据进行综合试验处理。测试某型陪试雷达,实际试验数据1 474点,未经过任何处理时测向精度为6.15°(r.m.s);剔除明显奇异数据5点,测向精度为5.47°(r.m.s);对剩余1 448点数据进行误差修正,计算机自动处理,去除被试设备安装误差及被试设备测向天线与提供舰位信息、航向姿态的试验平台姿态测量系统GPS天线位置误差,最后得出有效的测向精度为2.63°(r.m.s),满足该雷达对抗设备战术技术性能指标。
从试验数据综合处理的结果可以看出,通过对系统误差的修正,可消除测量设备或被试设备安装系统误差对测向精度的影响;根据莱特准则剔除明显奇异数据,可消除其对试验结果的影响,得到精确的量化结果,提高试验结果的准确性。图7、图8和图9分别为该雷达对抗设备测向精度试验数据进行综合处理前后误差曲线图。
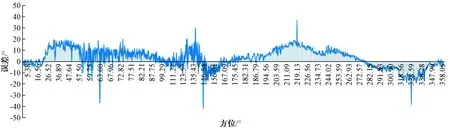
图7 原始数据测向精度曲线图

图8 剔除明显奇异数据测向精度曲线图
4 结束语
通过分析动态试验中影响舰载雷达对抗设备测向精度的几种原因,阐述了误差修正的原理和方法,对大量的测向精度试验数据采用综合处理方法,利用“测向精度处理程序”完成对试验数据中存在的系统误差分析、误差修正、奇异数据剔除等,减小系统误差对试验结果的影响,确保试验结果的可信度,对舰载雷达对抗设备的测向精度结果评估更为精确、合理。

图9 系统误差综合处理后测向精度曲线图
