关于选用六足机器人作为救援系统子体的研究
2019-07-19成鹏刘鑫李研林仁达蒋世法任季星
成鹏 刘鑫 李研 林仁达 蒋世法 任季星
摘 要:自然灾害对人类社会所造成了巨大的伤害。将机器人应用于救援系统可以实现很多人们无法完成的搜救任务使得救援的效率大大提升。六足机器人具有运动灵活、地形适应能力强的特点,被广泛应用于对自主性、灵活性有较高要求的非结构化环境作业中,通过模拟多足生物的运动方式,并对其运动方式进行改进。找到适合于机器人的运动方式和控制方法,实现机器人关节的多轴转动最终实现机器人的稳定移动。
关键词:六足机器人;救灾;控制系统
DOI:10.16640/j.cnki.37-1222/t.2019.16.142
1 设计背景
自然灾害对人类社会所造成的危害往往是触目惊心的,将机器人应用于救援系统可以实现很多人们无法进行的搜救任务。提高了搜救范围和效率。该设备也可用于人们不易探索的领域如被核辐射破坏过的环境。
2 國内外研究现状和发展动态
2.1 国内现状
与发达国家相比,国内机器人研究虽起步较晚,但发展日趋迅速,也取得了丰硕的成果。如2013年由上海交通大学研发的具有完全自主知识产权的“六爪章鱼”救援机器人[1]。“六爪章鱼”具备深入极端复杂危险环境的能力,可在核辐射、水下和火灾等极端环境下完成搬运、搜索、探测和救援作业等多种任务。
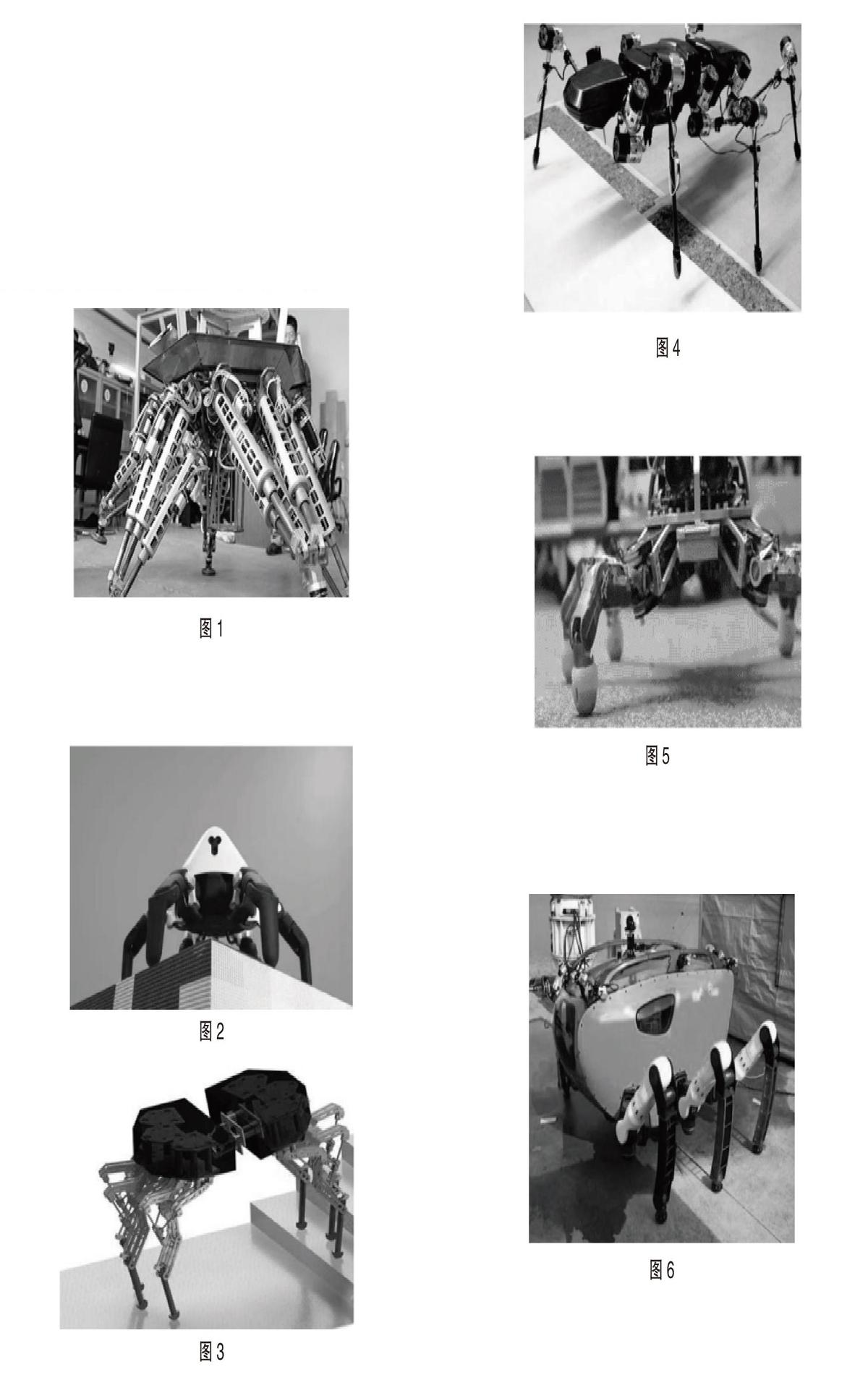
2016年,一台由荷福人工智能集团联合上海交通大学共同研发的六足并联步行机器人在上海浦东公布。如(图1)所示。
2017年Vincross 人工智能科技公司研发的全球首款可编程全地形消费级机器人,名为——HEXA。如(图2)所示。
2018年上海交通大学研制了一款灾后救援六足机器人:这款机器人主要用于野外环境探测与作业。可以代替救援人员携带检测设备进入发生事故的地点,探测灾后环境,搬运救灾物资等。如(图3)所示。
2.2 国外现状
2014年12月份,德国比勒费尔德大学研究人员打造出了一只形似巨型昆虫的地形探测机器人Hector,它拥有六条可以独立移动的支撑腿,因此适用于在各种地形上执行研究活动。如(图4)所示。
2016年,德国航空航天中心研发了一款六足爬行机器人,它利用视觉进行导航,拥有较高的机器人的自主能力。如(图5)所示。
2018年,韩国科学家发明的巨型六足机器人Crabster。这只巨型机械不仅能在水下游泳还能在陆地和水下爬行还能依靠相对灵活的四足到达其他水下机器人很难到达的偏僻地带。如(图6)所示。
2019年法国科学家开发出一种能像蚂蚁那样导航的六足机器人,这个机器人被称为AntBot,由CNRS研究所和艾克斯-马赛大学的研究人员共同开发。如(图7)所示。
3 移动机器人的设计与制造
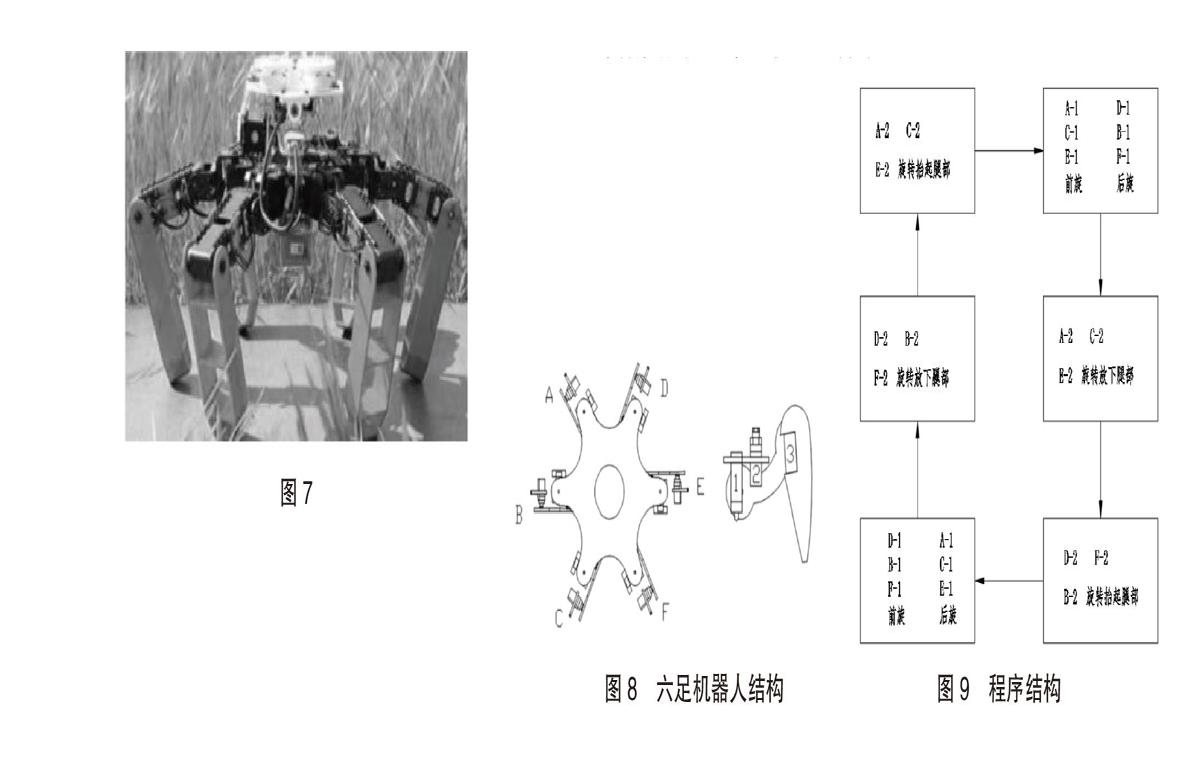
考虑到救灾现场或者探索场地为结构体环境,需要单体的机器人具有运动效率高、运动灵活、地形适应能力强等特点。经过查阅相关的资料和研究,我们发现六足机器人被广泛应用于全地形机器人的设计,当采用每条腿三关节的设计时其结构能充分满足复杂环境的需要。基于以上条件,我们最终设计了如下图所示的六足机器人结构。
4 机器人机身材料的选取
在选择机器人结构设计材料时,结合技术要求和成本等多方面考虑我们放弃了利用3D打印技术来加工机器人结构的想法。转而选择采用亚克力激光切割的方式来加工所需要的机械构件。亚克力是经过特殊处理的有机玻璃,具有耐磨及耐酸碱性能好、寿命长、加工性能良好等诸多特点[2]。利用激光切割可以快速得到所需工件。
按照所设计的六足机器人结构如(图8)所示,我们需要18路舵机分别控制六条腿的18个关节。机器人采用三角步态进行向各个方向的移动,即一侧的前后两条腿和另一侧的中间腿组成一组,分为左右两组交替想所需方向移动。控制方式我们采用的是通过开源的Arduino开发板进行设计[3]。控制的一个周期可以分为左右两个部分,两部分的程序结构相同分为三步如(图9)所示。第一步:A-2、C-2、E-2旋转抬起腿部。第二步:A-1、C-1、E-1向前进的方向旋转一定的角度称为前旋,D-1、B-1、F-1向前进的反方向旋转一定回复角度称为后旋。第三步:第一步:A-2、C-2、E-2旋转放下腿部。左右部分交替完成就可以实现机器人的移动。
5 总结
在有了六足机器人的子体之后,我们可以为多个机器人添加传感器并加入Zigbee的通信系统,通过外部计算机的辅助使得各个机器人所获得的信息能够共享,实现多机器人系统的构建。
参考文献:
[1]李满宏,张明路,张建华,张小俊.六足机器人关键技术综述[J].河北工业大学,2015(10):2.
[2]叶德军.机械加工中激光切割工艺的应用分析[J].民营科技,2018(07):3.
[3]王康南,王利霞.基于arduino平台的六足仿生机器人控制系统的设计[J].郑州轻工业学院,2018(01):58
基金项目:省级大学生创新创业训练项目“关于选用六足机器人作为救援系统子体的研究”(编号:201811927047)。
*为通讯作者