联合外形响应的深度目标追踪器
2019-07-16孙海宇陈秀宏肖汉雄
孙海宇,陈秀宏,肖汉雄
(江南大学 数字媒体学院,江苏 无锡 214122)
单目标跟踪是一项基础而又重要的计算机视觉任务。通常所讲的单目标跟踪是指:在视频的首帧,给定目标的初始状态(如:位置、大小),然后在视频的后续帧中估计出目标的状态[1]。估计一个对象的运动轨迹[2]可以达到目标跟踪的目的,但是目标轨迹的估计在多种干扰因素的影响下易有较大的误差。常见的干扰因素有:光照变化 (illumination variation,IV)、大小变化 (scale variation,SV)、遮挡 (occlusion,OCC)、变形 (deformation,DEF)、运动模糊 (motion blur,MB)、快速运动(fast motion,FM)、平面内旋转 (in-plane rotation,IPR)、平面外旋转 (out-of-plane rotation,OPR)、部分显示(out-of-view,OV)、背景杂乱(background clutters,BC)、目标像素过少 (low-resolution,LR)等[3]。实际上,目标跟踪就是要在当前帧中确定与目标相关的两大要素:位置以及大小。有很多方法可以实现该目的,其中,检测就是一种比较流行的方法。若在基于检测的目标跟踪方法中采用前背景分类器,这种追踪方法又称作基于判别式模型[4]的追踪方法。判别式追踪器充分利用了视频序列中每一帧的前背景信息,从而达到区分目标和背景的目的,如:Henriques等[5]所提出的追踪器以及Danelljan等[6]提出的追踪器,从某种意义上讲,以上追踪器亦可称为模板匹配类的追踪器。这类追踪器主要通过已知的目标信息,习得一个与目标相关的滤波模板,然后使用该模板在搜索区域(可能包含目标的区域)进行滑动匹配,以匹配度的形式来反应匹配区域是否是目标位置,并将匹配度最高的位置作为最佳目标位置。文献[7]中,主要讨论的是样本采样问题,当样本的数目采集的越多时,这些样本会构成一种理论比较完善的循环结构,故而提出了循环采样的方法。文献[5]中,基于文献[7],使用样本的原始像素或者方向梯度直方图作为样本特征求解模板,然后使用该模板进行目标位置的匹配。从跟踪的定义上来看,以上主要解决的是目标追踪中的位置问题。文献[6]中,基于文献[5],主要讨论了目标尺度问题,在求解尺度以及位置的时候,使用的是方向梯度直方图作为特征。类似的追踪器还有文献[8-9],而最近几年,深度学习在许多应用领域表现出了优秀的成绩[10],目标追踪领域也不例外,自Wang Naiyan将深度学习算法应用到跟踪领域[11]后,深度学习类的追踪器也涌现出不少优秀的作品,文献[12]中,提出了基于孪生网络的深度追踪器,其在利用目标信息提取出卷积特征之后,仅仅使用了卷积特征在搜索区域进行目标位置的匹配。文献[13]在文献[12]的基础上直接将相关滤波转化为了神经网络的网络层,使得两者合二为一,成为一个端到端的整体系统,但是依旧仅仅使用卷积网络所提取出来的特征。在最近的研究中,孪生网络受到了极大的关注。文献[14]提出了一种动态孪生网络通过在线学习目标的外形变化以获得目标的时域信息;文献[15]结合RPN改进了候选框的生成来提高追踪的精度;文献[16]则尝试通过改变训练样本的数据分布来获得更具有判别性的特征;文献[17]基于FaceNet中的Triplet Loss来改进损失函数。本文认为,网络卷积出来的特征其实是碎片化的,故而在进行目标位置匹配的时候,易在远离目标的地方产生位置响应噪声,从而影响目标位置的确定。因此,本文设计了一种联合外形响应的深度目标追踪器,利用外形信息的位置响应来修正卷积的位置响应,从而得到更准确的目标定位,并通过实验与其他追踪器进行了比较,验证了思路的可行性。
1 模板匹配以及外形信息
模板匹配类的追踪器,基本思想是通过衡量目标与搜索区域内各个部分的相似度,选取相似度最大的位置作为目标位置。事实上,这种思想在基于深度学习的追踪器[12]和基于相关滤波的追踪器[5]中均有体现。
1.1 孪生网络追踪器
在深度追踪器中,模板的匹配大都是通过孪生网络来实现的,Bertinetto等[12]第一次将孪生网络应用于目标追踪。图1展示了一个典型的孪生网络结构图,表示已经训练好的、权值固定的卷积网络;表示上一帧的目标信息;表示搜索区域;表示相关操作,实践中具体表现为卷积运算。当与分别经过卷积网络提取特征之后,分别得到卷积特征,以及,通过计算两者之间的相关性可得到搜索区域中每个部分与目标之间的相关程度响应(图中的红点表示搜索区域中红色部分与目标的相关程度,而蓝点则表示搜索区域中蓝色部分与目标的相关程度),当得到响应图之后,通过三线性插值,最大响应值的位置便可作为当前帧的目标位置。
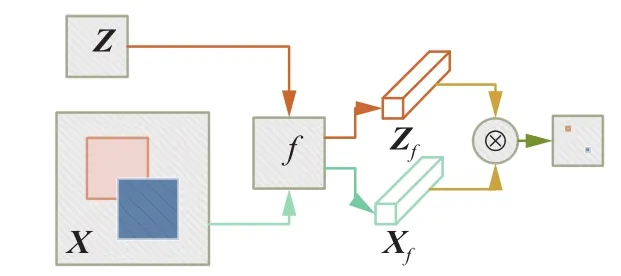
图 1 孪生网络追踪器结构图Fig. 1 Siamese network tracker structure
1.2 相关滤波追踪器
相关滤波类的追踪器最早是由文献[18]提出来的,文献[7]在其基础上发展了循环采样以及引入了核方法,但在文献[19]中,将目标位置和大小分开考虑,与本文将追踪中两大要素分而治之的思想更为契合,因此为本文所选用。为了获取目标位置的响应图,相关滤波类的追踪器要找到一个最优化的滤波器,该滤波器由所构成。通过最小化如下的代价函数获得:

1.3 目标外形信息
在人类视觉中,目标的外形信息具有重要的意义,倘若缺少了目标的外形信息,人类就会产生‘一叶障目'的视觉障碍,因此在过去的几十年中,学者们对于目标的外形信息有着大量的研究[20-23]。目标的外形信息一般存在于目标与背景之间,能够有效地突出目标物,为双眼提供一个良好的聚焦区域。由于目标与背景在外形上存在较大的差异,因而学者们常常使用微分的方式来检测目标的外形信息,常见的方式有Canny、Sobel、Roberts、Scharr、Prewitt、Hog,此外,还有小波变换等方式,其检测效果如图2所示。
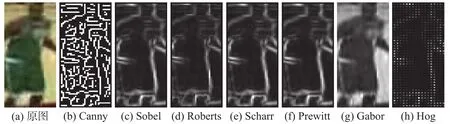
图 2 外形信息检测方法Fig. 2 The samples of methods to detect outlines
2 联合外形响应的深度目标追踪器
本文在可视化卷积网络特征后,观察到其与文献[24]所述的局部性、方向性的特征具有相似性后(如图3),更加验证了本文联合外形信息的想法。图3(a)为卷积网络所提取的特征,图3(b)为稀疏编码所求得的基,可以发现图3(a)的特征与未完全处理的基具有很高的相似性。如前所述,提取目标外轮廓信息有相当多的方法,鉴于方向梯度直方图在追踪问题上的广泛应用,本文选择使用方向梯度直方图来提取外形信息。
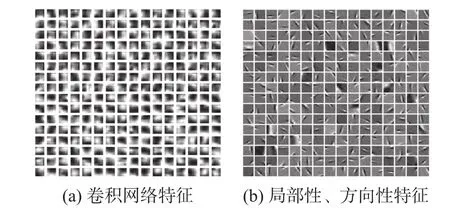
图 3 特征对比Fig. 3 Features comparison
2.1 网络结构
本文提出的联合外形响应的深度目标追踪器的结构如图4所示,它由两个部分组成,一个是由卷积网络所构成的位置匹配部分,这个部分主要使用卷积网络提取的目标特征进行位置匹配,称之为卷积匹配部分,另一个是利用外形信息使用相关滤波进行位置匹配,称之为滤波匹配部分。
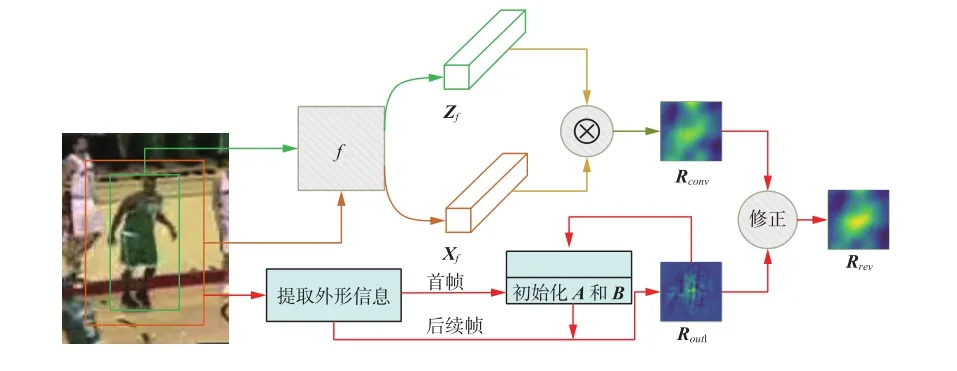
图 4 本文目标追踪器结构Fig. 4 The architecture of the proposed deep tracker
2.1.1 卷积匹配部分
在追踪器的卷积匹配部分仅使用卷积网络提取的特征进行目标位置的匹配,同时融合了尺度考虑,同文献[12]中所表示的那样,本文仅使用了3种尺度,追踪器的输入同文献[12]一样是一对样本,一个是在初始帧中标记出来的目标,用来表示,其维度是,另一个是在当前帧中,以上一帧目标中心为中心的包含背景的目标搜索区域,用表示,其维度是,将两者通过权值固定的卷积网络,是文献[25]中所提出的AlexNet网络(不包含全连接层),提取出对应的卷积特征和之后,通过相关操作得出目标的位置响应。
2.1.2 滤波匹配部分
在追踪器的滤波匹配部分,主要使用方向梯度直方图来提取目标的外形信息。由于目标的外形信息常常存在于目标与背景之间,为了提取目标的外形信息,需要包含一些背景信息,因此本文直接在中进行目标的外形信息提取。如果当前帧是首帧的话,就使用式(2)初始化滤波匹配时所需要的和,如果当前帧不是首帧的话,就利用式(5)求得目标的位置响应,然后再利用式(3)和式(4)更新和。
2.2 修正部分
在没有使用外形信息对位置响应进行修正的情况下,由于卷积特征中多是类似于局部的、方向性的特征,这种碎片化的特征容易导致在远离目标的区域处产生极大的位置响应点,从而形成位置响应噪声。如图5中卷积匹配的位置响应图所示(X、Y轴无十分重要的物理意义,Z轴表示相关性程度,数值越大表示该处与目标的相关性越大,则颜色越红)。相对的,在搜索区域中,目标的外形占比一定大于局部特征的占比,所以利用了外形信息的滤波匹配的位置响应大多会集中在目标区域处,如图5中滤波匹配的位置响应图所示,联合该外形信息的位置响应,可以有效地突出目标的所在区域,使得位置响应集中在目标区域处,从而达到抑制噪声,避免位置发生漂移的目的。如图5中修正的位置响应图所示,可以看到目标的位置响应图在修正后,抑制住了左边的噪声响应。联合该外形位置响应,涉及到数据融合技术,可以使用加权平均法、贝叶斯估计法[26]、卡尔曼滤波法[27]等,本文为验证想法直接采用了最为简单的加权平均法:


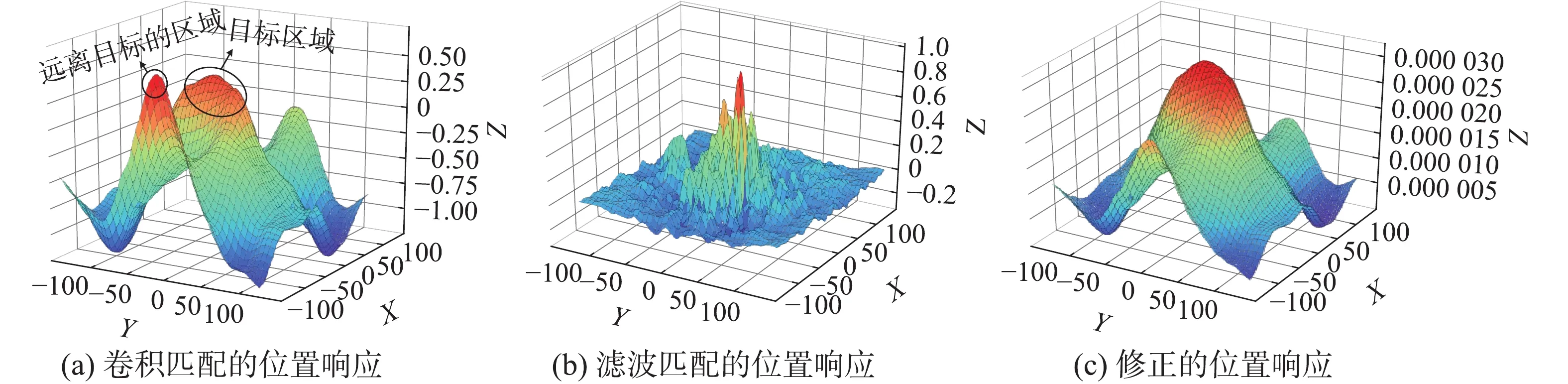
图 5 位置响应的变化Fig. 5 The transform of position response map
3 实验配置以及评价指标

3.1 实验细节
训练时,网络的输入是一对样本,并且,执行
卷积匹配部分,网络的构成同文献[12]一样(去除了网络的全连接部分),权重的取值是经过405 650次随机梯度下降得到的,网络训练的数据集是从ILSVRC-2015视频数据集[29]中提取出的4 417个视频序列,网络训练的损失函数为一次梯度下降使用8对样本,一对样本中,的维度是,的维度是,经过网络后,的维度是,的维度是,经过三线性插值后,维度为,学习率采用动态学习率,初始值为,然后使用如下的指数衰减法进行衰减:


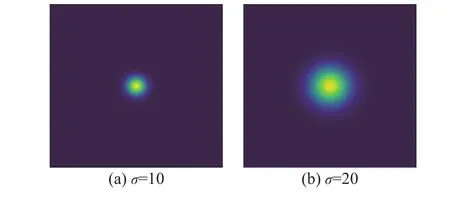
图 6 效果图Fig. 6 The effect of
3.2 实验设备
本文使用Tensorflow[30]框架来实现模型,版本为1.4.0,实验是在配置为i5-7300HQ 2.5 GHz CPU,GeForce GTX1050 GPU的笔记本中运行的。
3.3 测试数据集以及评价指标
3.3.1 指标
目标追踪需要解决两个问题:位置和大小,因此,评价一个追踪器的优劣往往通过精度图和成功图来描述[4]。精度图是指在不同的中心误差下,目标追踪的成功率所构成的图;成功图是指在不同的重叠率下,目标追踪的成功率所构成的图。其中,中心误差是指:追踪器所输出的目标框的中心与标签目标框的中心之间的误差,常用欧氏距离表示,单位是像素;重叠率o的定义为

3.3.2 测试数据集
本文使用目标追踪测试平台(object tracking benchmark,OTB)[1,3]中 CVPR-2013、OTB-50和OTB-1003个数据集对现有的算法进行评估。这3个数据集分别有51、50和100个视频序列,每个视频序列都包含了IV、SV、OCC、DEF、MB、FM、IPR、OPR、OV、BC、LR中的多个干扰因素。在这些干扰因素的影响下,追踪测试平台统计追踪器的成功率,以精度图和成功图的形式来反应追踪器的追踪性能。
3.3.3 外形信息的时间花费
本文在不同分辨率图上测试了提取外形信息以及获得其对应的位置响应所花费的时间,如图7所示。分别给出了提取外形信息的时间花费和获取外形信息对应的位置响应所花费的时间。从图中可以看出,外形信息的提取时间相对较为合理(和图像分辨率之间接近线性关系);同时,获取位置响应的时间相对较长,有待进一步改进。
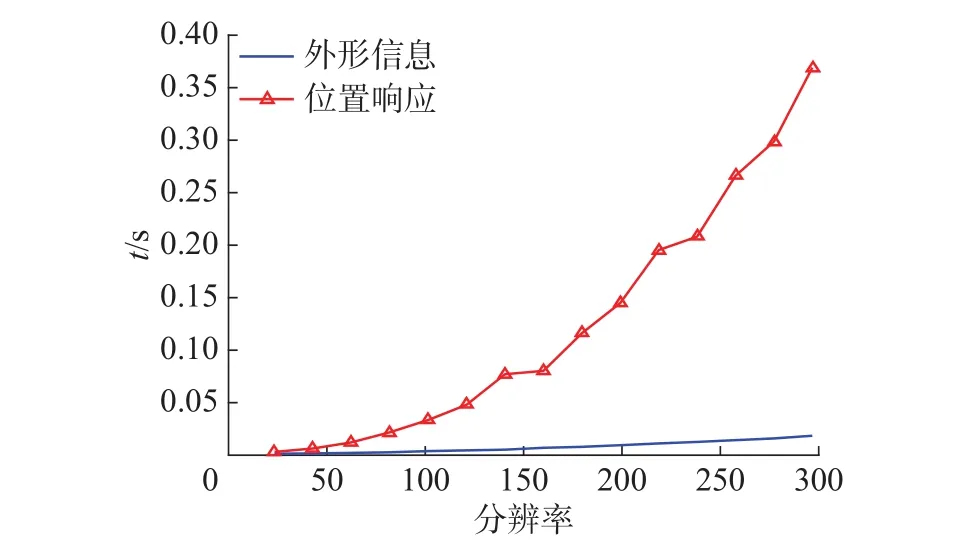
图 7 时间花费Fig. 7 The results of elapsed time
3.4 平台测试结果
本文在目标追踪测试平台上和近几年优秀的追踪器 CFNet_conv3[13]、SiamFC_3s[12]、Staple[8]、fDSST[7]、 ACFN-selNet[31]、 SAMF[9]、 LCT[33]、MEEM[32]、ACFN-attNet[31]、DSST[19]、KCF[5]进行了比较,其结果如图8所示,这里仅给出了CVPR-2013的结果,并利用图9,直观展示了部分追踪效果(更多的结果数据请访问文献[34]),图8(a)代表数据集的成功图结果,图8(b)代表数据集的精度图结果。从图8(b)的结果中可以看出,在中心误差阈值很大的情况下,本文追踪器依旧有着优秀的成功率,说明在追踪的过程中,本文的追踪器发生了较少的边框漂移,反应到图8(a)的成功图中,可以看到,在重叠率阈值很小的情况下,本文追踪器的成功率依旧优秀,而很多追踪器的成功率却不理想,说明他们在追踪的过程中,发生了较多的边框漂移现象,导致了目标丢失;而本文追踪器在进行位置确定的时候,利用了外形信息来抑制原本位置响应中的噪声点,所以具有较少的边框漂移现象。以上的结果表明本文的追踪器具有优秀的追踪效果。
图 8 测试结果Fig. 8 The results of object tracking benchmark
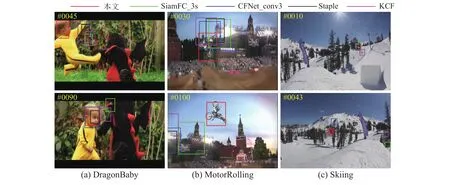
图 9 追踪效果直观感受Fig. 9 The direct feeling of our tracker
3.5 直观效果
在追踪测试平台的测试序列中,每个序列都包含了多个干扰因素。从这么多的测试序列中取得优秀的追踪效果是相当不容易,由于本文使用了外形信息来对目标的位置响应进行噪声抑制,所以从上面的测试平台给出的追踪结果可知,本文的追踪器具有优秀的追踪能力,但由于篇幅限制,这里给出几组具有代表性的视频序列追踪效果的直观展示,如图9所示,正红为本文追踪器。
4 结束语
本文尝试从理解卷积特征的基础上来理解目标追踪中卷积位置响应的结果,从而指导如何修正目标跟踪中的卷积响应。通过分析可知:卷积网络抽离出的卷积特征类似于局部性、方向性的特征,是碎片化的,在进行位置匹配的时候,可以通过突出目标区域的方式来缓和这种碎片化特征的影响。和最近几年优秀的追踪器相比,该思路具有一定的可行性,能够有效提高目标位置定位的精度。接下来的工作可以进一步探究如何缩短位置响应的时间;本文卷积网络的许多特征之间具有很高的相似性,是否可以直接通过稀疏化的方式来实现抑制位置响应中的噪声也是值得研究的。
