基于葵花影像中国地区夜间云识别方法研究
2019-07-16安妮尚华哲胡斯勒图海全胜包玉海
安妮,尚华哲,胡斯勒图,海全胜,包玉海
(1.中国科学院遥感与数字地球研究所 遥感科学国家重点实验室,北京 100101;2.包头师范学院 资源与环境学院,内蒙古 包头 014030;3.内蒙古师范大学 地理科学学院,呼和浩特 010000)
云分布地区直接影响地表反照率和全天候地表辐射能量收支,云识别也是获取云量,反演云相态、云参数和气溶胶参数的重要依据[1]。国际上卫星云检测发展成果突出,早期主要利用一些极轨卫星数据,如ISCCP(The International Satellite Cloud Climatology Project),方法是利用可见光(0.6 μm)和红外波段(11 μm)阈值设定,检测云与晴空。AVHRR(Advanced Very High Resolution Radiometer)利用可见光、红外波段作了海洋、陆地不同地表情况的云与晴空识别,后改进为5 个条件运算的阈值设定,实现从晴空中提取云像元[2]。MODIS 数据云产品考虑多种云类型以及不同地表特征,通过多波段阈值算法进行云检测。
由于地物在白天夜间不同的辐射特性,以及云的微观物理特性(云粒子大小、分布等)决定了不同类型云的亮温差异,因而云检测的提取时间模式分为白天和夜间,如MODIS、GOES 云掩膜算法时间适用性分为白天和夜晚,日本葵花系列卫星又增加了清晨和黄昏昼夜更替时段。不同时段的辐射能量直接影响到云检测算法和提取阈值。近年发射的卫星传感器具备较高的光谱分辨率、时间分辨率和地面分辨率,云检测的算法与精度也在不断提高。GOES(The Geostationary Operational Environmental Satellite)系列卫星对美国西部及太平洋地区的云检测结果分为四 种[3]。日本葵花静止气象卫星的云掩模数据产品具有高时间分辨率,分为白天、黄昏、夜晚、清晨四个时段,对晴空下不同地物的辐射特性又分为五个地类进行云识别提取[4]。可见在全天候监测中,多种卫星观测的云产品数据,需区分时段应用不同的监测算法,尤其在夜间,由于地表辐射特性、温度与白天有差异,同时又缺少了可见光波段,夜间云与地物的区分算法会比白天更为复杂。特别是冰雪地表区域,其某些红外波段的亮温特性与冰云十分相似[5],更增加了其监测难度。
国际上主流的云检测方法主要是通过云与非云在可见光和红外波段的光谱差异,进行阈值检测。不同的影像数据波段不同,提取方法也有差异。ISCCP 算法是利用可见光、红外波段作阈值判定识别云[6-8],缺点是与晴空性质接近的云易被漏判。APOLLO 方法利用AVHRR1-5 通道数据的5 个测试算法,像元要同时满足多个阈值被确定为云[9],不足是当有一个算法误判,结果就会误认为晴空。CLAVR-x 系统实现了云检测、云相态、云高和云光学性质算法[10-11],通过光谱和空间检验实现云检测。二氧化碳薄片法是利用CO2在15 μm 处对辐射的吸收特性区分云与晴空中的透明云[12]。其中基于短波辐射被动遥感数据的阈值法是应用最广、普适性最好的云识别方法,然而被动遥感中夜间云识别较白天缺少可见光观测数据,主要依据红外波段,利用云与非云的亮温差异进行区分。对于研究中国地区云检测中,尤其是大气污染严重地区,雾霾情况有时会误判为云,还需要考虑霾对云提取精度的影响[13]。同时中国地形高程起伏变化显著,地表温差差异大,影响了云识别阈值的准确性。
针对以上两方面考虑,文中提出利用Himawari-8影像数据,探究适用于中国地区夜间时段的云识别算法。选用2016 年四个季节各一个月的夜间数据进行云识别,利用影像数据的红外波段,根据云与非云的亮温差异,采用阈值法进行云与非云区域的区分。针对中国地形高程地表亮温差异对云检测结果的影响,提出将高程分为1000、2000、3000 m 三个阶梯的阈值算法。对于云识别结果验证,由于夜间缺少可见光,使用了MODIS 云数据产品和雷达数据CALIPSO 分别做了定性和定量的结果验证,来确定适用于中国夜间云识别算法。
1 数据
1.1 实验数据Himawari-8 AHI
日本静止气象卫星Himawari-8 于2014 年10 月7日成功发射,观测时段为2016—2022 年,后继发射Himawari-9 将运行到2029 年。Himawari-8/9 卫星搭载了可见红外辐射计 Advanced Himawari Imager(AHI),设置16 个观测波段,3 个可见光波段、3个近红外波段和10 个红外波段。重复观测时间为每10 min 观测全部可视面一次,日本东北部、西南部、台风区域4 次和两个陆地区域20 次。夜间云识别在没有可见光的辐亮度,主要使用红外波段数据的亮温值BT(Bright temperature)探讨云与晴空的亮温差异作云识别。
1.2 验证数据CALIPSO VFM
2006 年4 月28,由美国NASA 和法国共同发射了云-气溶胶雷达卫星CALIPSO(Cloud_Aerosol Lidar and Infrared Pathfinder Satellite Observations),主要用于研究全球云和气溶胶影响下的辐射平衡和气候变化,与其他五颗同属于NASA“A-Train”系列卫星。卫星搭载了3 台传感器:正交偏振云-气溶胶激光雷达(CALIOP)、红外成像辐射计(IIR)、宽视场相机(WFC)。文中用于夜间云识别结果验证的VFM(Vertical Feature Mask)数据是CALIOP 获取的高分辨率垂直云-气溶胶类型数据。CALIOP 传感器有2个波段偏振雷达、3 个接收频道,获取在1064 nm 和532 nm 波长处的后向散射强度[14],使用532 nm 波段数据用于云检测结果的验证。
VFM 垂直分类数据产品是以n×5515 矩阵形式存储,垂直距离为30.6 km,水平范围为5 km。垂直分辨率从地面高度-0.5 到8.2、20.2、30.1 km 分别为30、60、180 m,水平分辨率根据不同垂直范围分为333、1000、1667 m,见表1。数据存储为16byte来表示不同的气溶胶和云类型,1~3 bits 从0—7 分为8 类数据,其中云类型值为2,气溶胶为3,10~12 bits 表示潜在云、气溶胶等类型,是对云、气溶胶等类型的进一步划分。云类型中,透明云考虑为晴空。数据结果验证中,夜晚数据过境范围较好的时间为UTC18—19 时。
2 夜间云检测算法
夜间云识别主要使用红外波段,根据云与非云的亮温差异进行阈值判别。基于前人提出的全天候云提取算法,研究了适用于中国地区的夜间云识别阈值方法见表2。由于非云区域不同地表的辐射能量存在较大差异,且这种辐射能力的差异明显与高程分布具有一致性,导致一些算法的云检测阈值设定不合理,云与非云区域的混淆误判。因而考虑地表辐射能量差异,将判别阈值进行划分,以实现云识别。

表2 基于日本静止气象卫Himawari-8 影像数据在 中国的夜间云识别算法
2.1 算法数据的输入输出
夜间云识别算法主要利用Himawari-8 影像数据的第7—16 波段数据的亮温值BTλ,λ 为波段的中心波长,时间分辨率为1 h,地面分辨率为2 km。中国界线矢量数据,用于确定研究区范围;中国地形高程数据DEM,用于判别地表高程阶梯。夜间时段判别利用太阳高度角数据θsunZ,且当θsunZ>85°时为夜间。
云检测算法输出数据为云掩模数据,影像大小为3722×1944 像元,像元分为云与非云。时间分辨率为1 h,地面分辨率为2 km,地理坐标为WGS_1984。
2.2 云检测
根据不同类型云检测算法实现云与非云像元区分,非云像元也因不同地表高程情况存在亮温差 异[15],确定了三个高程阶梯不同的判别阈值,见表2。
1)BT7.3-BT11.2 云检测。BT7.3-BT11.2 用于检测在夜间陆地上空的高层、中层云。晴空下BT7.3 对于地表温度与大气中的水分较为敏感,BT11.2 亮温主要取决于表面辐射,云中水汽的存在会降低 11.2 μm 波段的亮温值,使两波段的差异降低。
2)BT11.2-BT3.9 云检测。该算法用于检测低层厚云,低云在3.9 μm 波段吸收较11.2 μm 波段低,散射较高,在11.2 μm 波段亮温在235~265 K,阈值的设定会有4.5~2.5 K 变化浮动。该方法不适用于干旱地区,在内蒙古干旱地区,如沙漠、荒漠化草原地表,会因3.9 μm 发射率较高,其较大亮温差而误认为云,因而还需要对沙漠地区进行进一步验证。
3)BT11.2-12 云检测。11.2 μm 波段的亮温值可用于区分云与非云[16],但不同地表也存在亮温差异,11.2~12.4 μm 算法会更好地区分薄云和晴空。地表在这两个波段基本没有亮温变化,云在这两个波段的亮温差主要取决于云含水量和卫星天顶角。静止气象卫星葵花-8 卫星天顶角固定,因而其有云区域与非云区域差值主要取决于云中水汽或冰晶在11 μm 辐亮度的吸收与散射[2],薄云的亮温主要取决于大气中水汽对亮温的吸收和云的发射率。表现为云中的水粒子在8~12 μm 波段范围中,11.2 μm 附近的吸收最强[17],因而不适用于冰雪地表。因为在地表温度较低情况下,冰雪亮温值和云的亮温特性接近,会误识别为云。
4)基于高程的BT13.3-11.2 云检测。对于复杂多样的地表,云检测要考虑不同地表的辐射以及夜间的亮温特性,云检测计算的亮温差异主要取决于地表的发射率高于云,来区分云与晴空。从葵花的可见光和近红外波段数据可以看出,非云区域中,高原地区地表亮温明显低于东部沿海地区,其东部沿海高程基本分布在1000 m 以下,而高原地区主要集中在高程3000 m 以上的青藏高原区域,可见其地表辐射能量分布特征与地形高程有一定的一致性。为提高云检测精度,同时考虑我国地形三级阶梯特点(如图1a所示),可初步划分为小于1000 m、大于3000 m和1000~3000 m 三个阶梯的不同地表辐射,分别进行云与非云的阈值设置,(如图1b、c 所示),进而提高青藏高原高寒地区、内蒙古干旱地区的提取 误差。
该方法主要根据11.2 μm 附近云中水汽相对地表较低的辐射率,可以用于去除云结果中误判的地表辐射较高区域,如干旱地区、高原地区。根据不同的地表辐射能量划分为三个等级,地形高程大于3000 m的青藏高原地区,在红外波段中地表亮温较低,尤其 在11.2 μm 处,因而这两个波段的云与非云相对亮温差异较小,其云与非云的划分阈值最大。1000~3000 m高程地区主要分布于中国中部与内蒙古高原地区,由于内蒙古高原大部分处于半干旱地区,地表亮温高于青藏高原,低于东部沿海地区,因而两波段云与非云的相对亮温差异较大。云分布区域BT13.3-11.2具有高于高原地区的相对亮温差值,识别阈值较大。高程低于1000 m 的东部沿海地区,非云区域地表辐射能量最高,红外亮温值也高,BT13.3-11.2亮温相对差异最大,因而划分阈值最小,如图 1d所示。

图1 基于高程的BT13.3-11.2 云检测
3 结果
对2016 年1 月、4 月、7 月和10 月所对应的四 个季节分别做夜间云检测。首先对比晨昏交接时段的云结果验证(如图2 所示),选取了2016 年4 月2日上午7—8 点。对我国范围内晨昏交接时真彩色影像数据与Himawari-8/AHI 数据提取的云识别结果进行对比,结果表明、在昼夜交替时段,该云检测算法提取的云结果具有较好的连续性,基本实现了夜间云分布的提取。
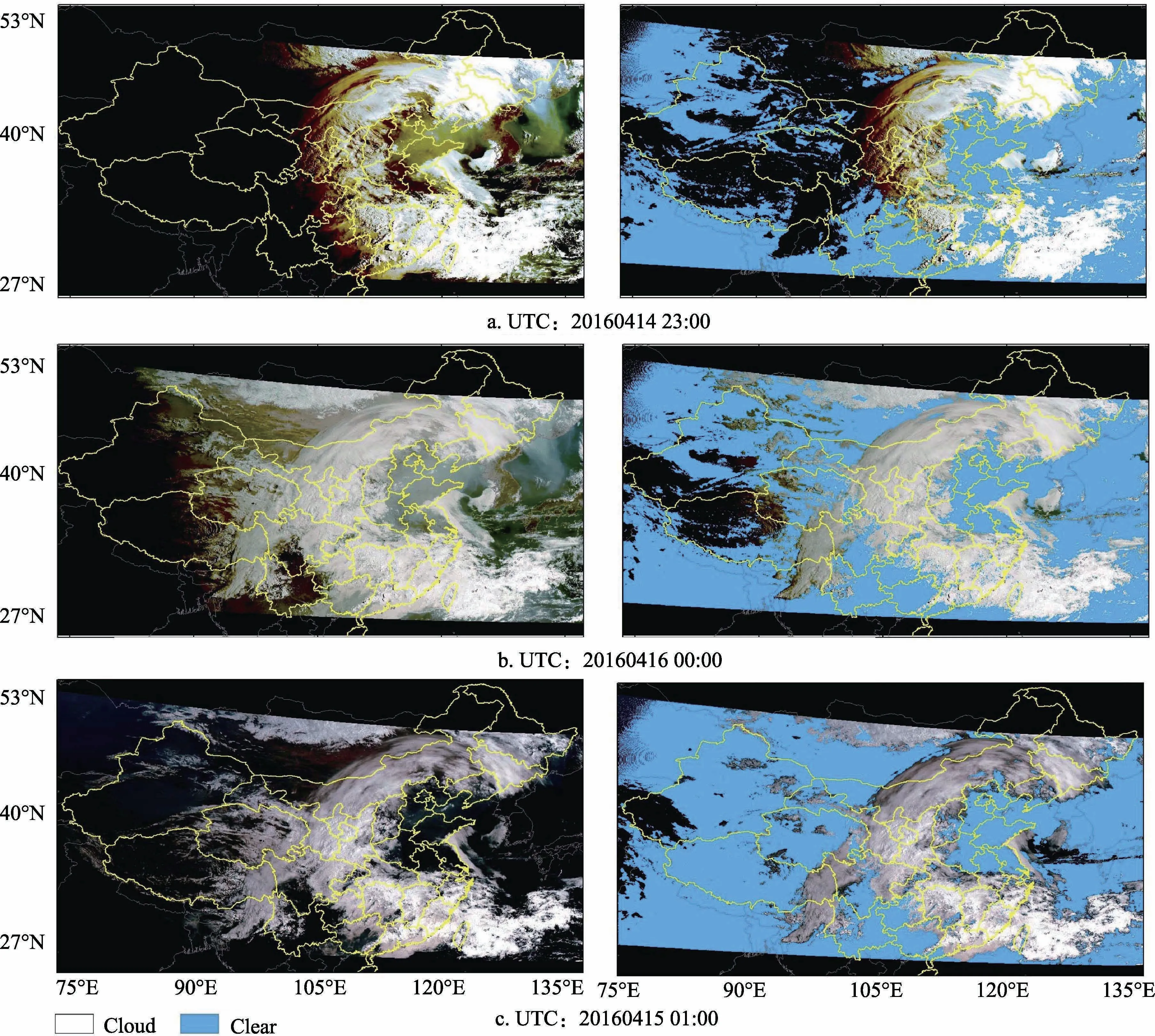
图2 UTC23-00-01 时云检测结果与Himawari-8/AHI 真彩色影像数据对比
为进一步验证夜间云检测结果的准确性,利用MODIS 云产品MYD06 进行云提取结果验证,分别对四个季节的1 月、4 月、7 月、10 月UTC:17—21时段云检测结果作对比,如图3 所示。结果表明,云检测区域与 MYD06 云产品基本一致。同时相较MYD06 云产品,Himawari-8 影像云监测算法结果具有更好的时间分辨率和空间分辨率,其时间间隔为 1 h,监测时间连续性较好,较高的空间分辨率能表现云边缘细节信息,尤其是碎云的分布。
定量检测夜间云识别的可信度,利用 CLIPSO(Cloud-Aerosol Lidar and Infrared Pathfinder Satellite Observations)雷达数据VFM 进行精度验证,结果见表3[18]。CLIPSO 过境时间为UTC19 时的空间分布云类型与检测结果对比如图4 所示,并分别统计了2016年四个季节云、非云数据的比值。遗漏率LR(leakage rate)和错误率FAR(false alarm rate)[19-21]表示提取精度,其中VFM 数据的0.3 km 水平分辨率重采样为Himawari-8/AHI 数据相匹配的2 km,采样方式为求取6 个像元的平均值。
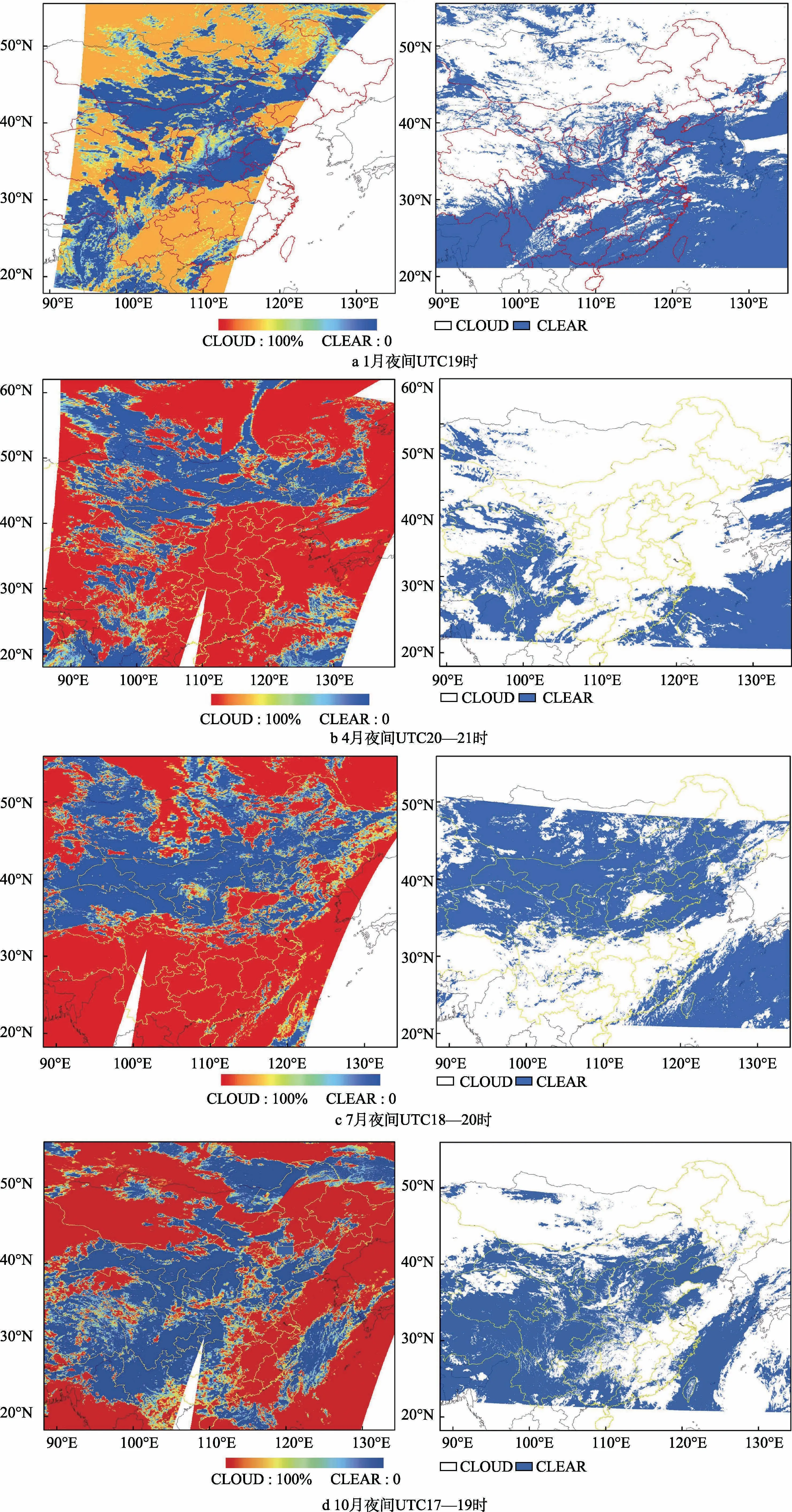
图3 1 月、4 月、7 月和10 月夜间UTC18—20 时MYD06 云数据产品与云检测结果对比

图4 VFM 数据云、晴空类型与云检测结果对比
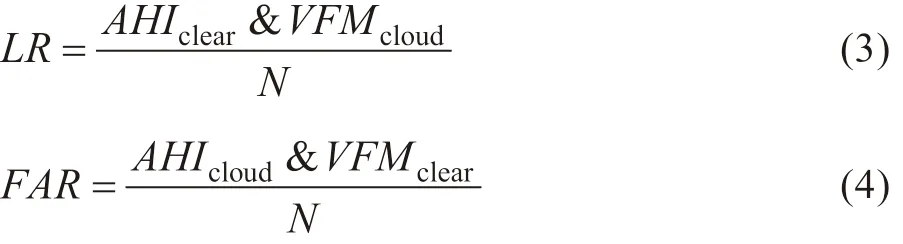
式中:AHIclear、VFMclear分别表示AHI、VFM 数据非云像元;AHIcloud、VFMcloud分别表示AHI、VFM数据云像元;N 为数据统计像元总数。
结果表明,四个季节的夜间云识别结果与CLIPSO 数据的云类型比值为77.86%,非云像元比值为79.67%,提取精度上较好地实现了夜间云与非云像元的识别(见表3)。其中把云像元错误提取为非云像元的平均遗漏率为2.76%,非云像元误提取为云像元的平均错误率为12.31%。该算法较好地实现了夜间云检测。
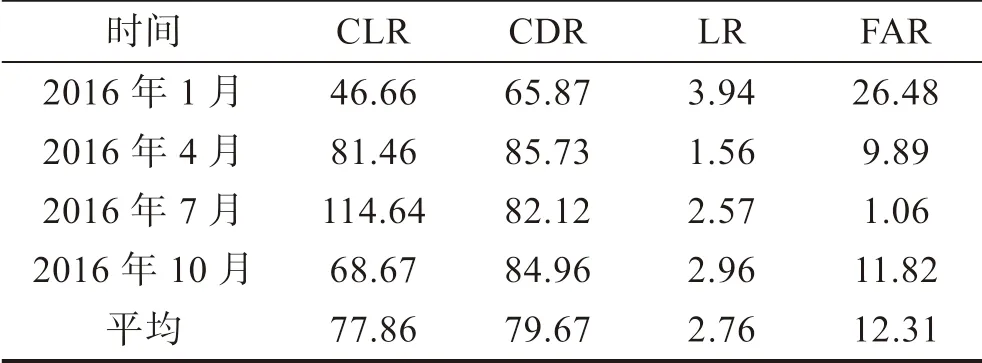
表3 云检测结果与CLIPSO VFM 数据的精度验证 %
4 结论
文中利用日本静止气象卫星Himawari-8/AHI 数据的高时空分辨率,选用2016 年四个季节夜间影像数据,利用云与非云像元在红外波段的亮温差异,同时根据中国地形高程差异对云检测结果的影响,分为1000、2000、3000 m 三个高程阶梯,调整对应波段云识别方法阈值,确定了适用于中国地区夜间云识别算法。由于夜间缺少可见光,云识别结果的验证使用了MODIS 云数据产品和CALIPSO 雷达数据分别做了定性和定量的结果验证。
1)中国地形高程差异对云检测结果的影响,主要表现为不同高程、不同地表的亮温差异,因而可分为1000、2000、3000 m 三个阶梯进行云检测算法的阈值判定,来提高云检测结果精度。
2)基于Himawari-8 影像数据的云识别方法具有更高的时间分别率及空间分辨率,检测结果也与MODIS 的MYD06 云产品基本一致。
3)CALIPSO 雷达数据四个月的平均验证结果为:云区域的提取精度为79.67%,非云区域的提取精度为 77.86%,将有云区域错提为非云的误差为2.76%,将非云区域误提取为有云区域的遗漏率为12.31%,较好地实现了中国地区夜间云与非云像元的识别。
本研究提出了中国地区的夜间云识别算法,对于大气相关云研究及全天候的辐射能量收支研究具有重要意义。云分布提取方法与结果仍有不足,提取方法应再充分考虑水域、冰雪地表。同时文中只针对中国领土区域做了云检测的数据实验,并未考虑领海水域。对于内蒙古高原干旱地区的提取结果有些误差,同时对于冬季1 月的云识别结果相对较不理想。主要是冬季地表亮温值低于夏季,导致阈值法的阈值差异不显著或有适当的变化,进而有些云无法与晴空区分,影响云提取精度,今后工作可进一步优化云识别算法。
